0%
0%
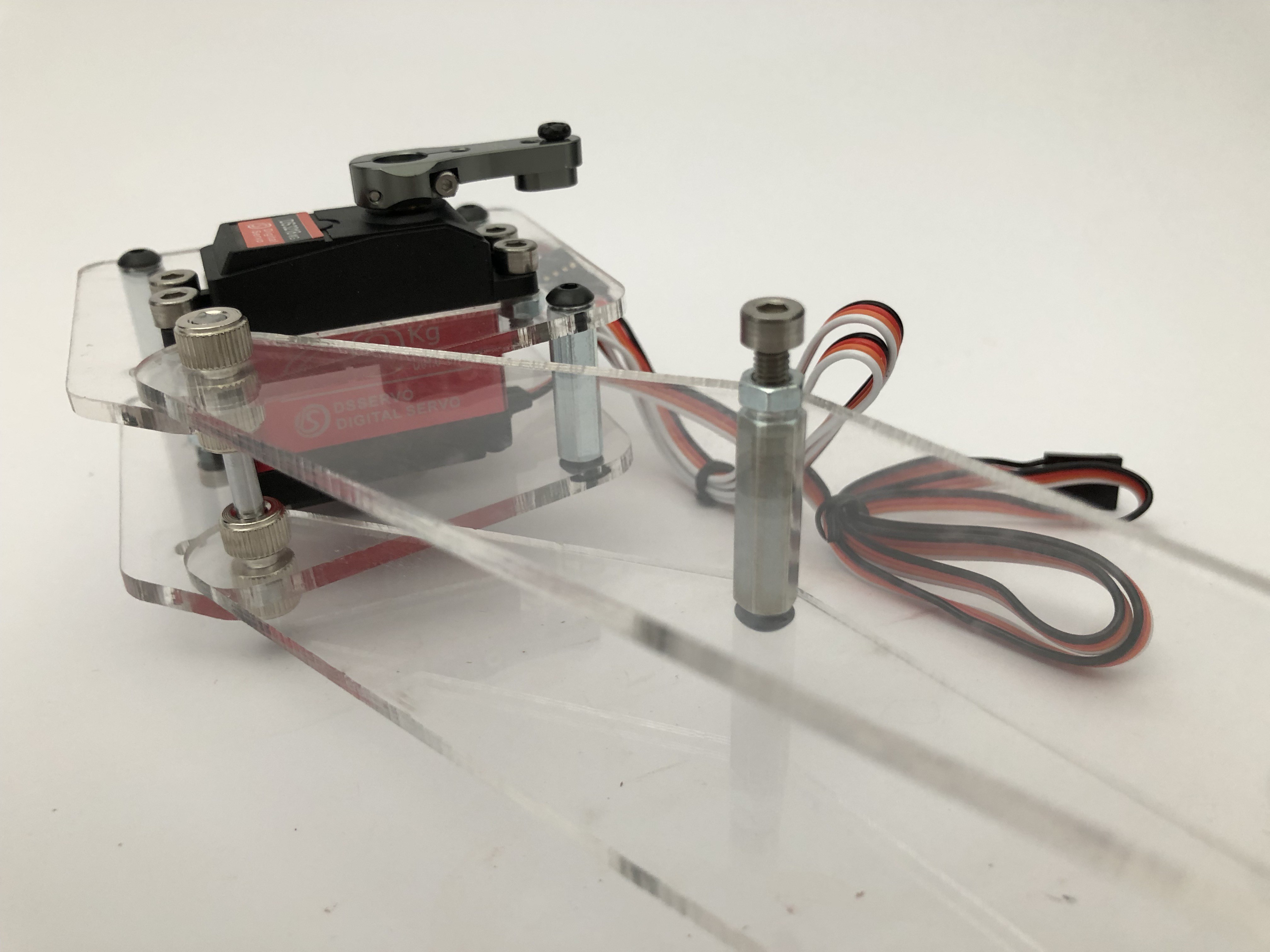
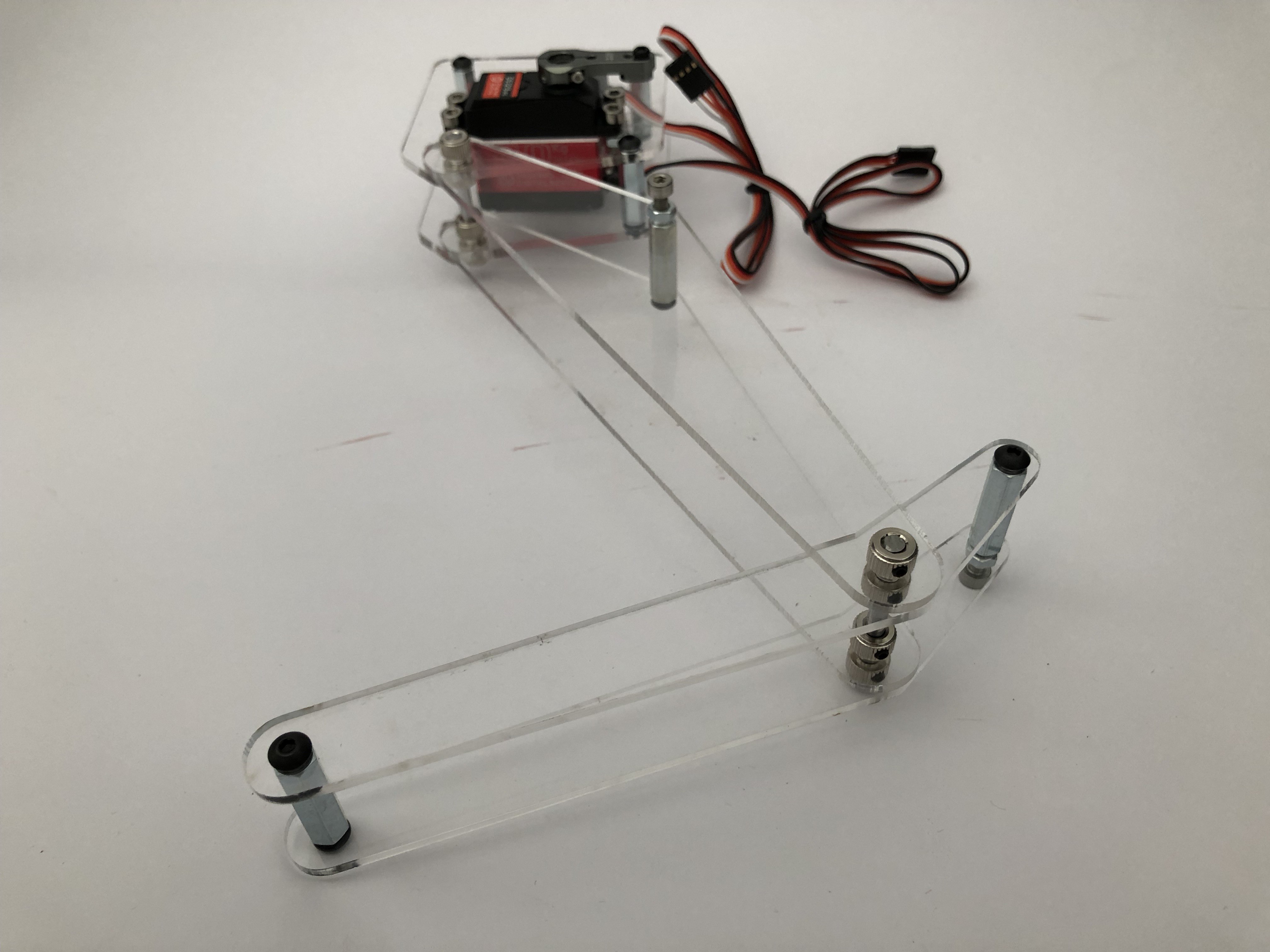
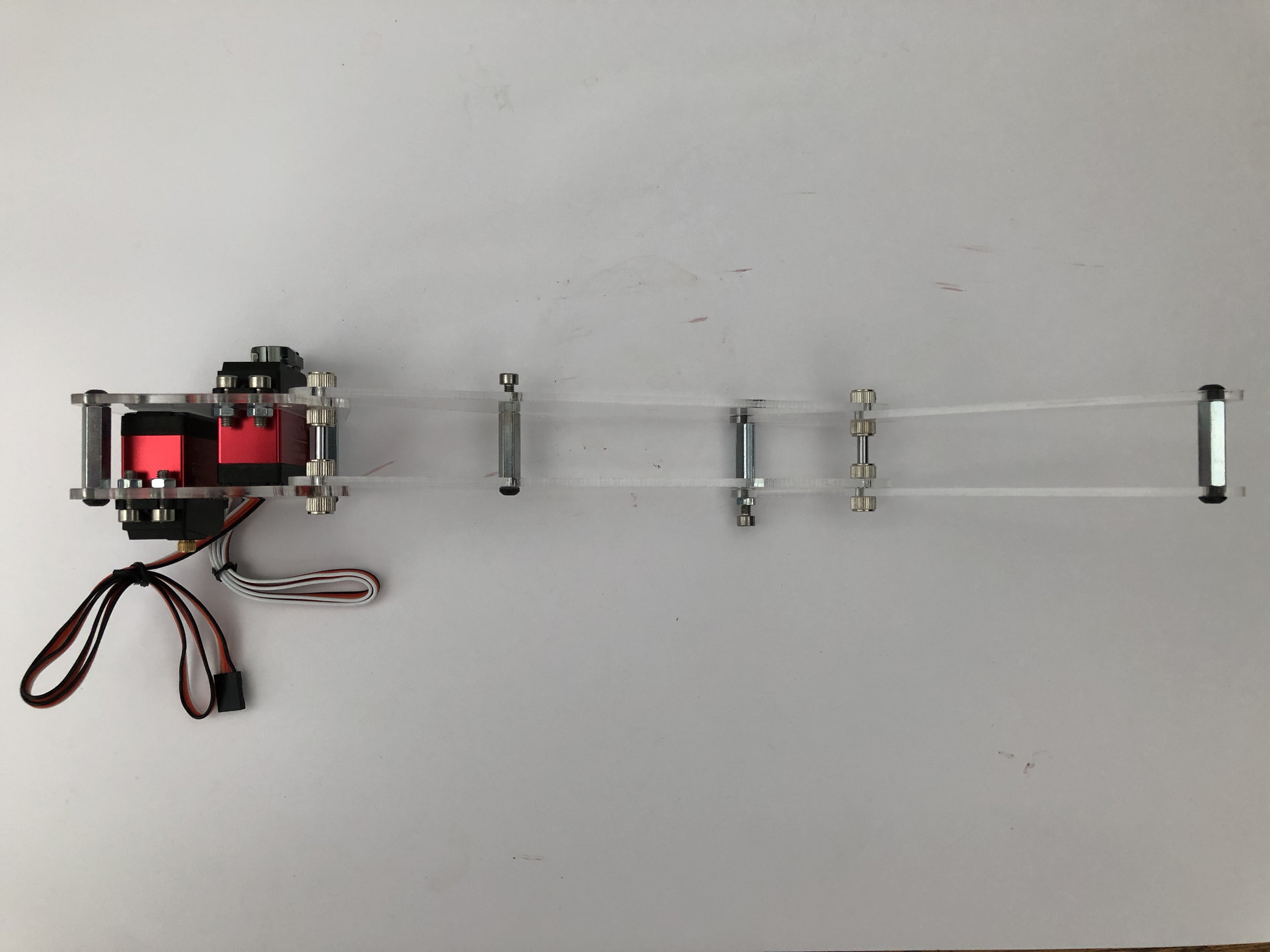
OpenK9
Open source, low-cost robotic quadraped for reinforcement learning
 Ben Nortier
Ben NortierBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


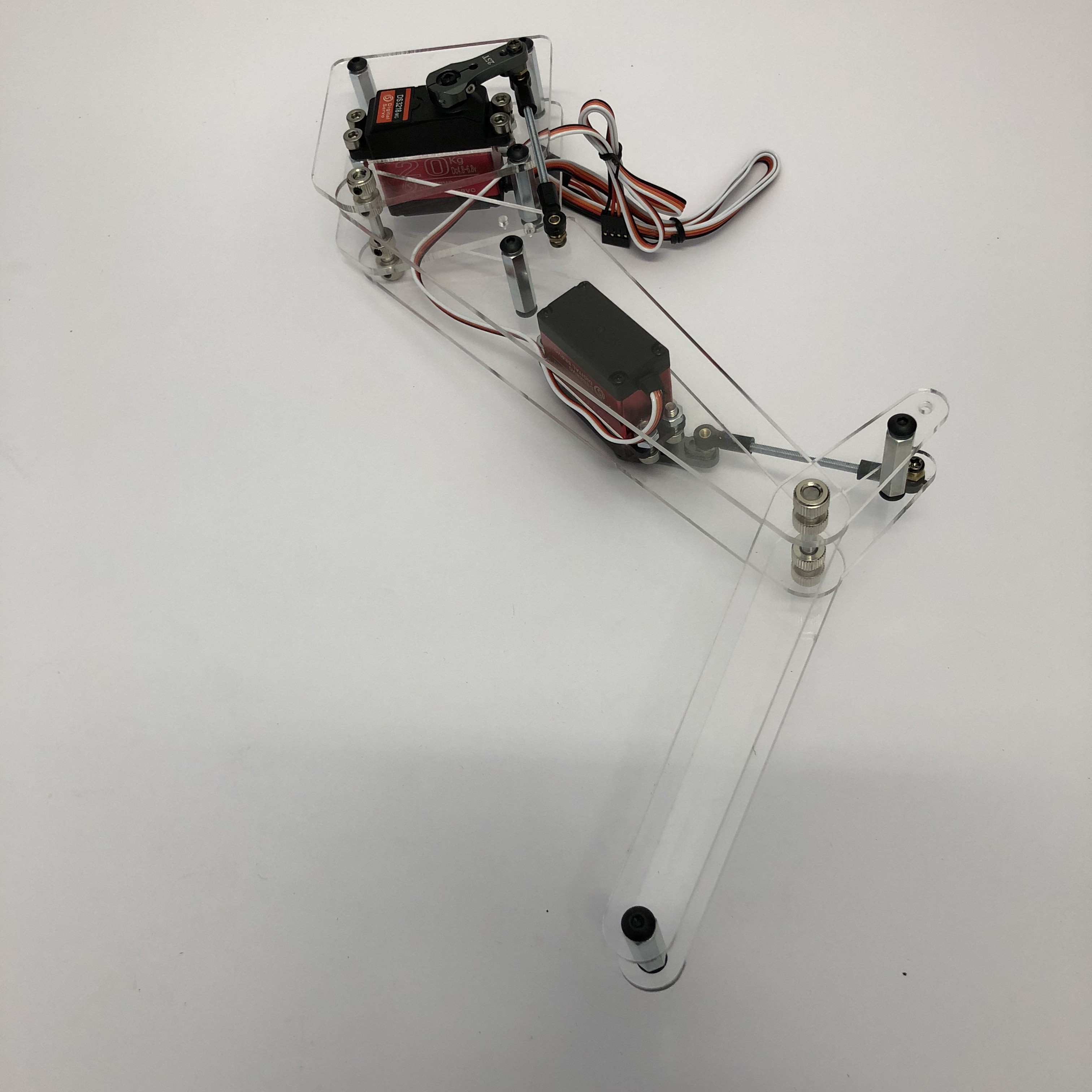
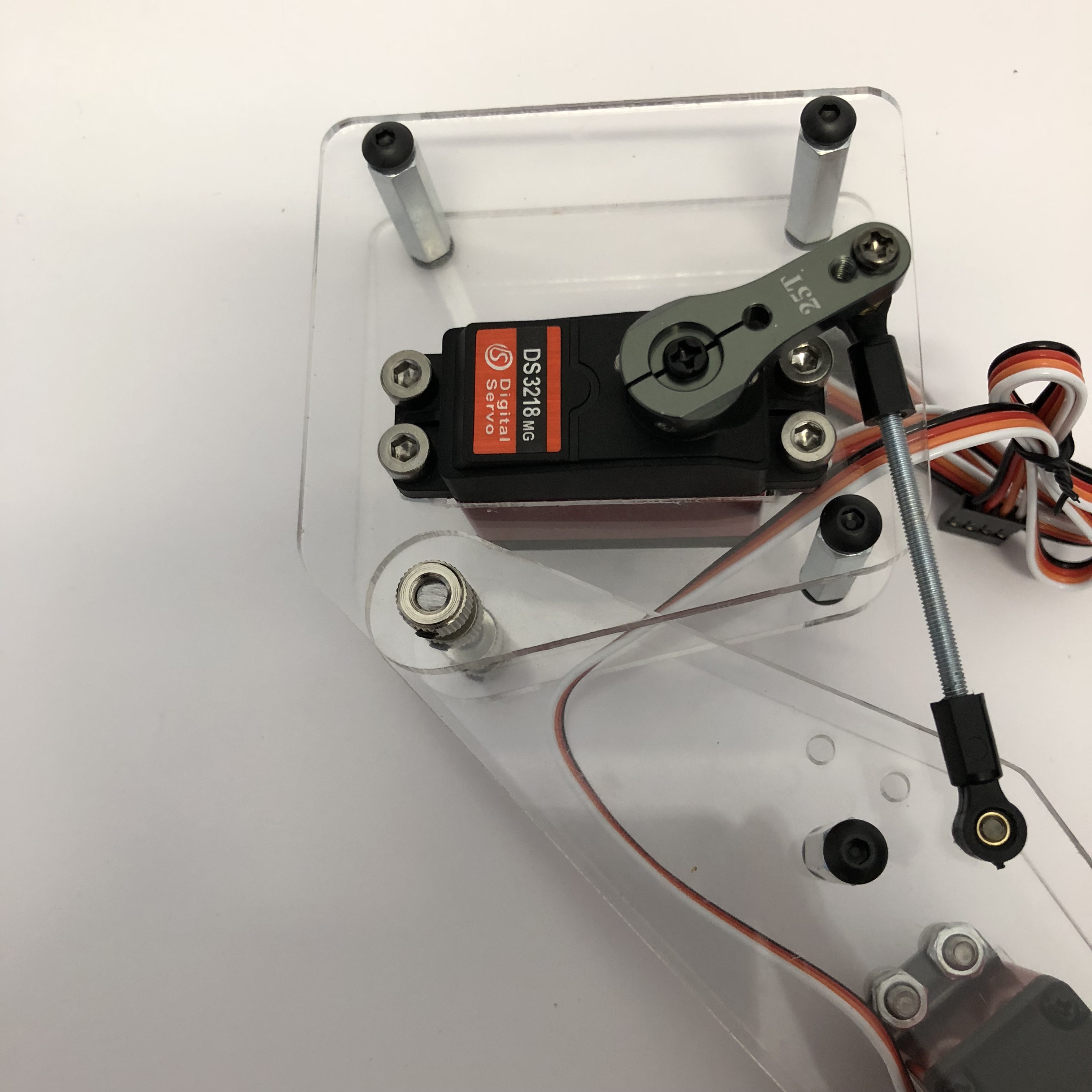
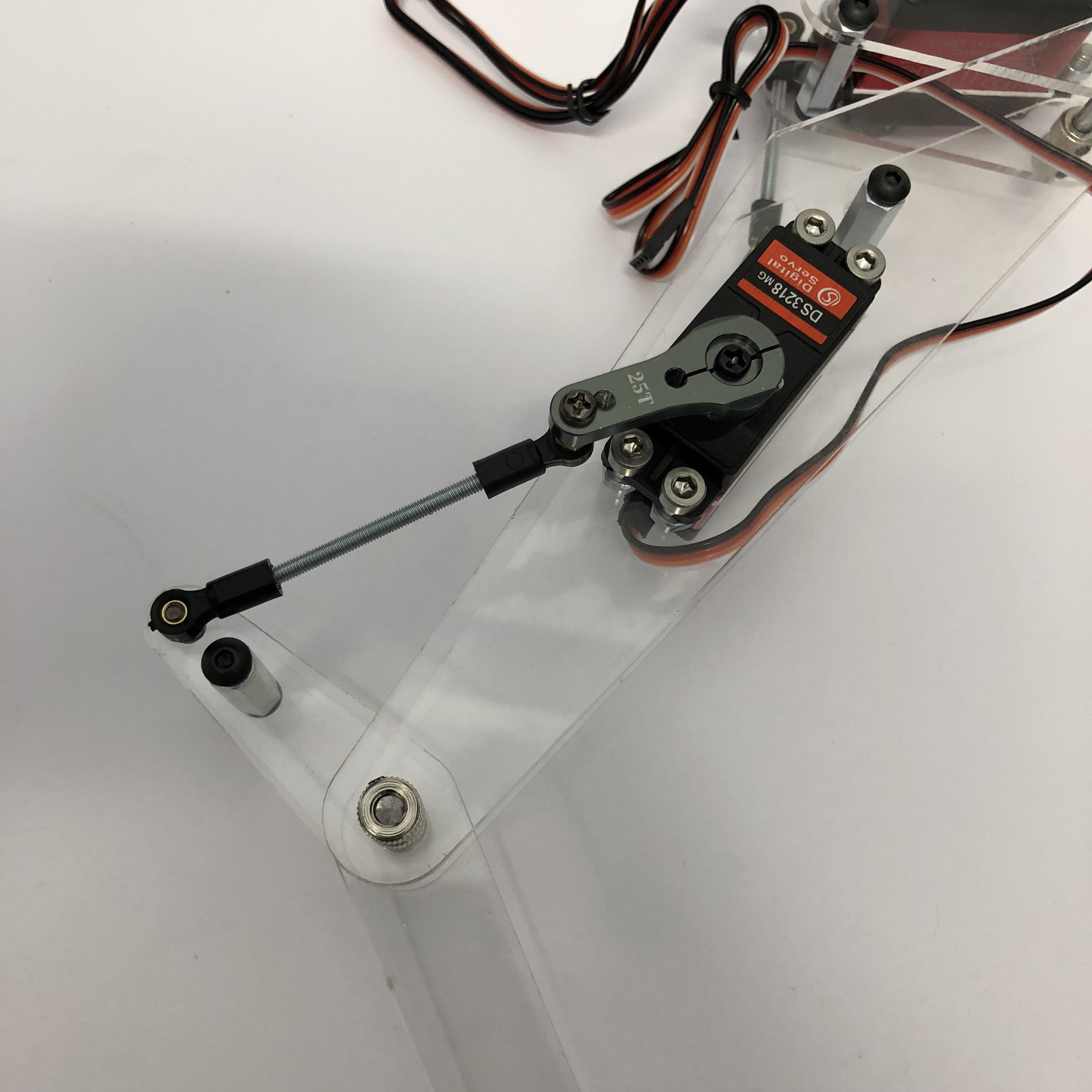
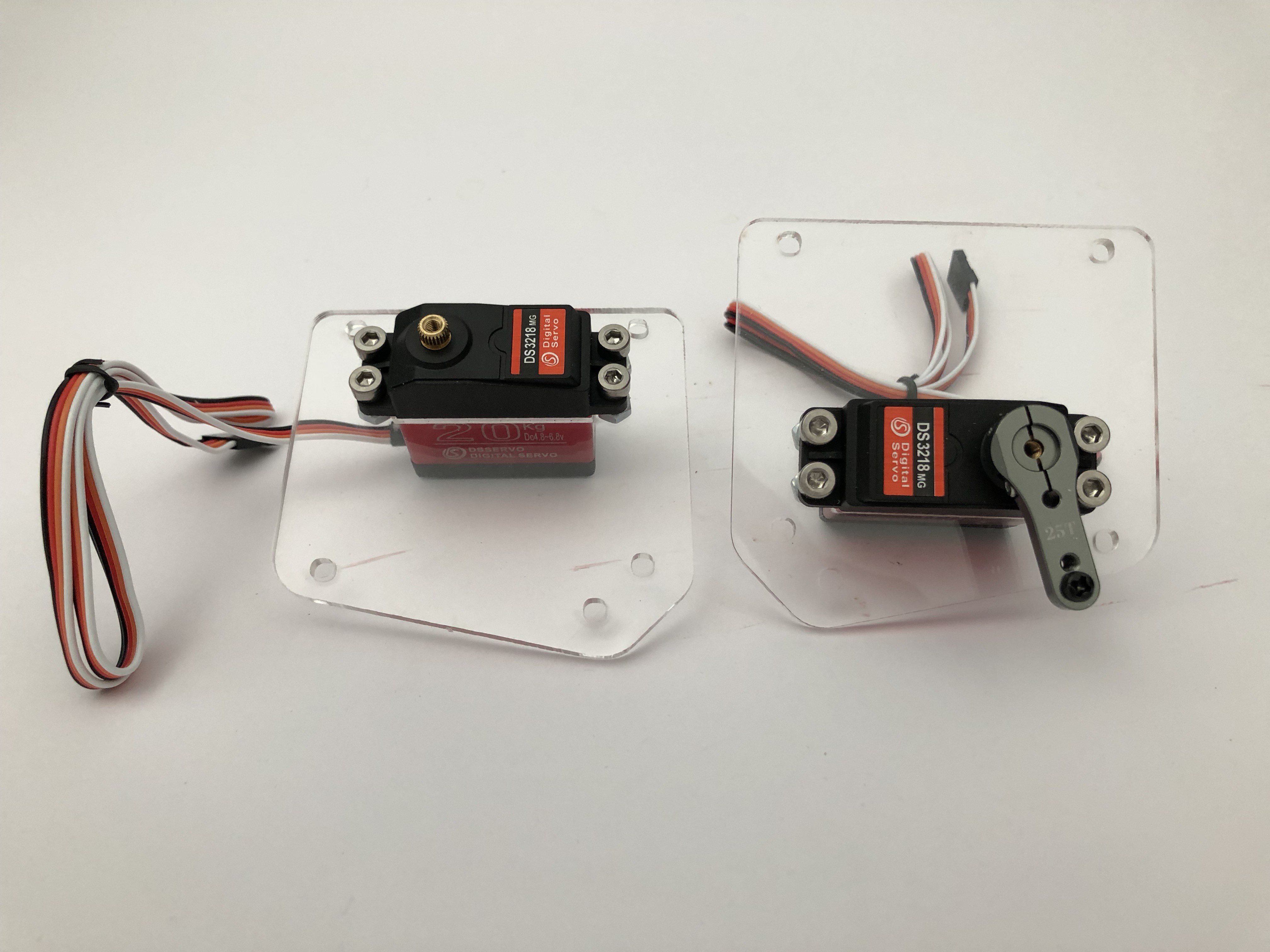
 I have some goals for the the mechanical design of this open source robot - it doesn't help if you make an open source robot but it requires a $ 500 000 mold! These goals are:
I have some goals for the the mechanical design of this open source robot - it doesn't help if you make an open source robot but it requires a $ 500 000 mold! These goals are: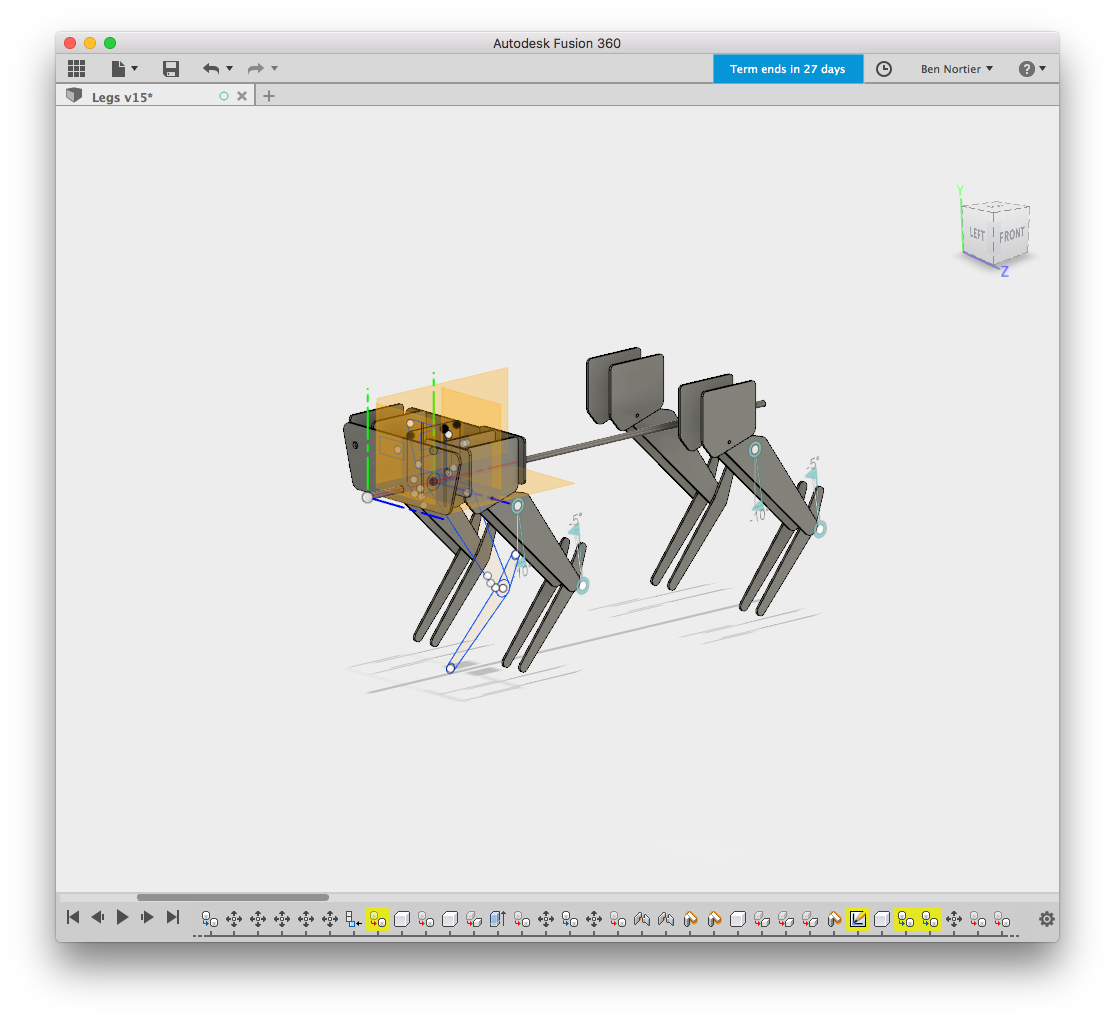










Is the project active?