0%
0%
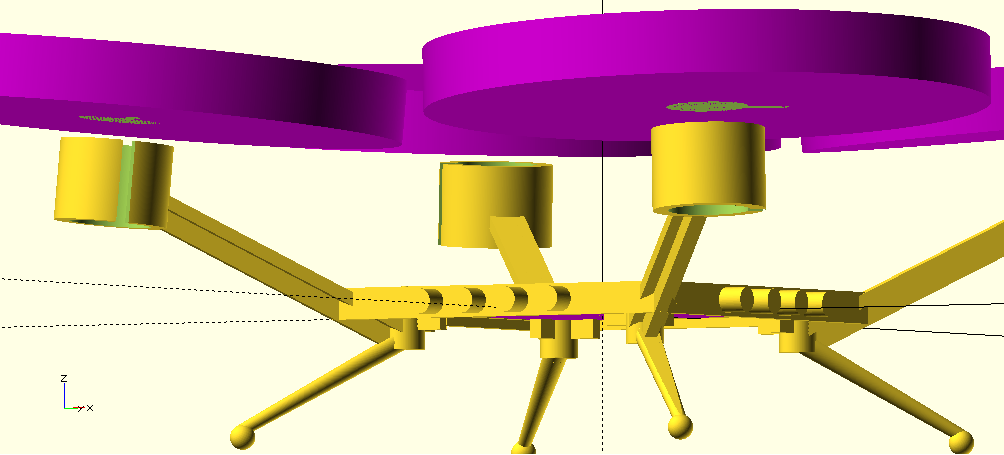
quadcopter in one inch
itsy-bitsy teeny-weeny fully autonomous quadcopter
 jeff
jeffBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests









 Philip Ian Haasnoot
Philip Ian Haasnoot
 honxen
honxen
 Thomas
Thomas
when you design your own flight controller with an ARM 32bit MCU how do you make the firmware and software? isn't that more difficult or do you copy opensource information
thanks