davish
davish-
Parts Arrived, Experimentation Begun
10/31/2015 at 00:13 • 0 commentsAfter the parts first arrived, namely the H-Bridge, Accelerometer, and motors, I tested them all individually to ensure that they worked as expected with an Arduino Uno. Afterwards, I wrote a script to incorporate all the components into one mini-project: A tilt-controlled motor. The speed and direction of the motor depends on the tilt of the accelerometer. It was just a small test to make sure everything could talk to each other.
After that, I 3D-printed wheels for the robot. The size of the holes fits snugly onto the motor shaft, though I might eventually put a dab of Krazy Glue on the ends to keep it secure. We'll see if they have enough traction; I might need to add rubber bands.
Here's a picture of the wheel, after a few iterations:
![]()
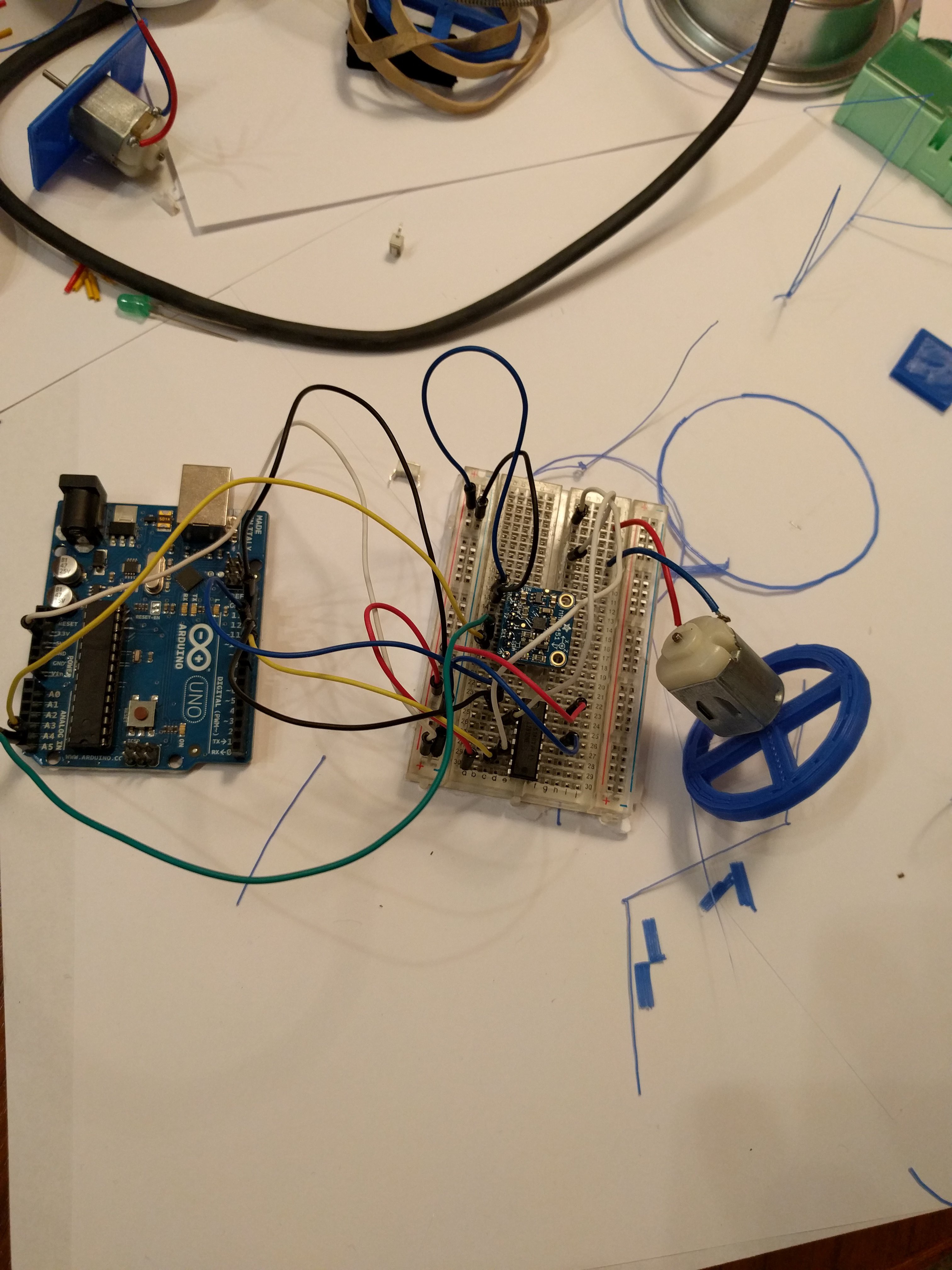
And here's the whole test setup:
![]()
Next step is to 3D-Print the chassis.