bobricius
bobricius-
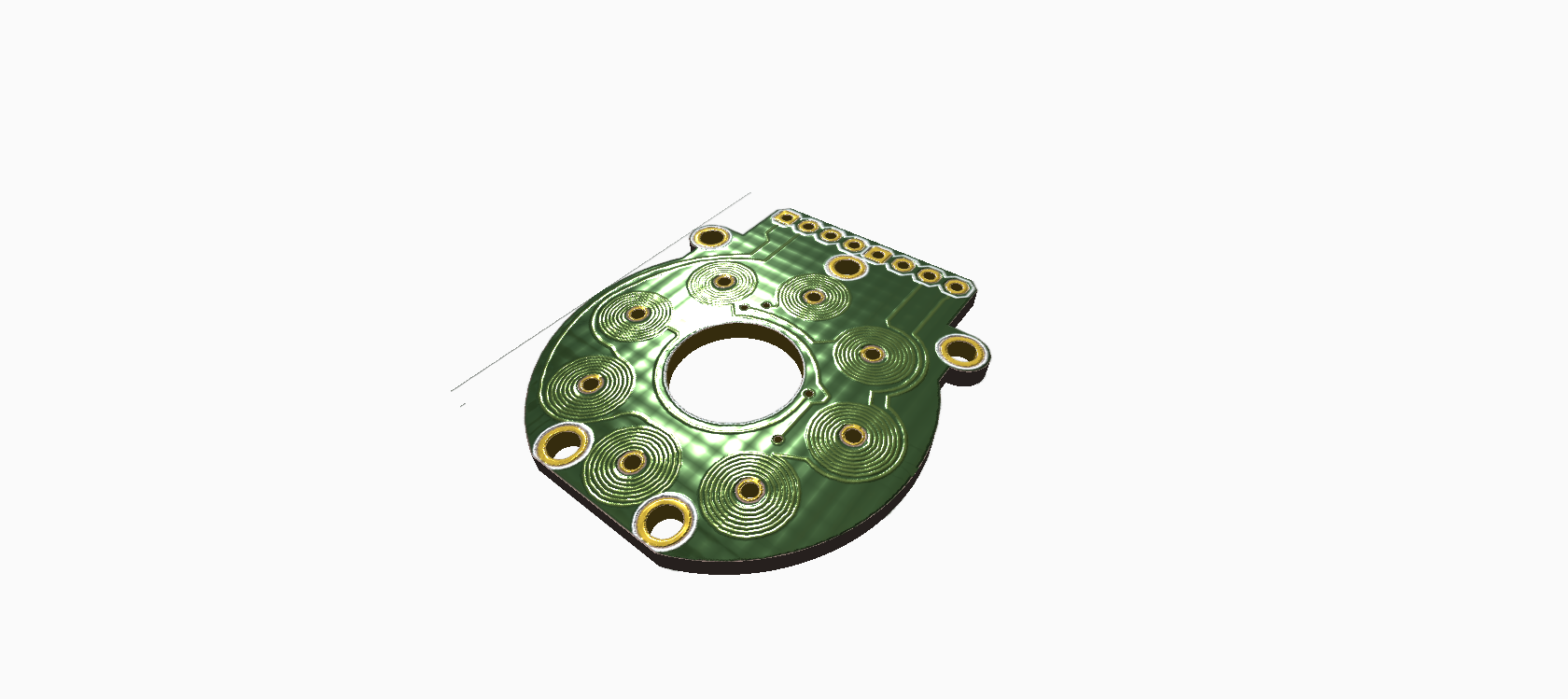
Coil configuration redesign
03/14/2018 at 21:50 • 0 commentson first protype I have 8 independent coils, now I connected opposite pairs in series
![]()
PCB stepper motor
... is designed for direct drive wheels for swarm robots
... is designed for direct drive wheels for swarm robots
on first protype I have 8 independent coils, now I connected opposite pairs in series