 Vittorio Loschiavo
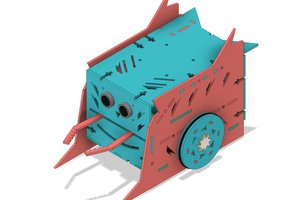
Vittorio LoschiavoThe dimensions of the robotic lawnmower are 495x340x195 mm (length - width - height), is based on an Arduino Uno board with a shield made specifically for the control of the movement, the management of sensors and coils for the detection of buried wire, the solar panel and the blade. While a shield allows to control the movement of the two 12-volt gearmotors, able to run with a max. 23 rpm and equipped with a pair of 100 Ncm. Two 150 mm diameter and 40 mm wide wheels are mounted on the back of the robot and are attached to the two gearmotors by means of HUBs.
On the front there are two small pivoting wheels. At the top of the robot is a 10-watt solar panel, which is used to recharge the 12V 2,1Ah battery. The blade for cutting is a blade that is commercially available in do-it-yourself centers. It is made of high-strength nylon, has a diameter of 250 mm and has 3 teeth. This blade is attached to a DC motor that can rotate at a speed of 21,000 rpm.
The detection of obstacles is entrusted to two ultrasonic modules mounted on the front and one in the back. On the side there are two sensors to detect shocks. At the bottom of the robot are proximity and lift sensors, these sensors are used to lock the blade in case of lifting or tilting of the robot during operation.









 codersilver
codersilver
 Mike Rigsby
Mike Rigsby
 M. Bindhammer
M. Bindhammer
In my project I have used this solar panel https://www.futurashop.it/pannello-solare-monocristallino-10-watt-7500-mcry10?search=mcry10&fuoriproduzione=true.
VMP 18 volt and IMP 0,56 A