 Antonio Regueira
Antonio RegueiraHi everyone!
In the last post commented on a new assembly for the elbow, I had to make a couple of adjustments but it works well.
To make the movement I had thought of gt2 belts, but when I had the assembly finished, making tests of efforts, I had to tighten the belt so much that it broke, so I chose to use special strings that yield nothing.

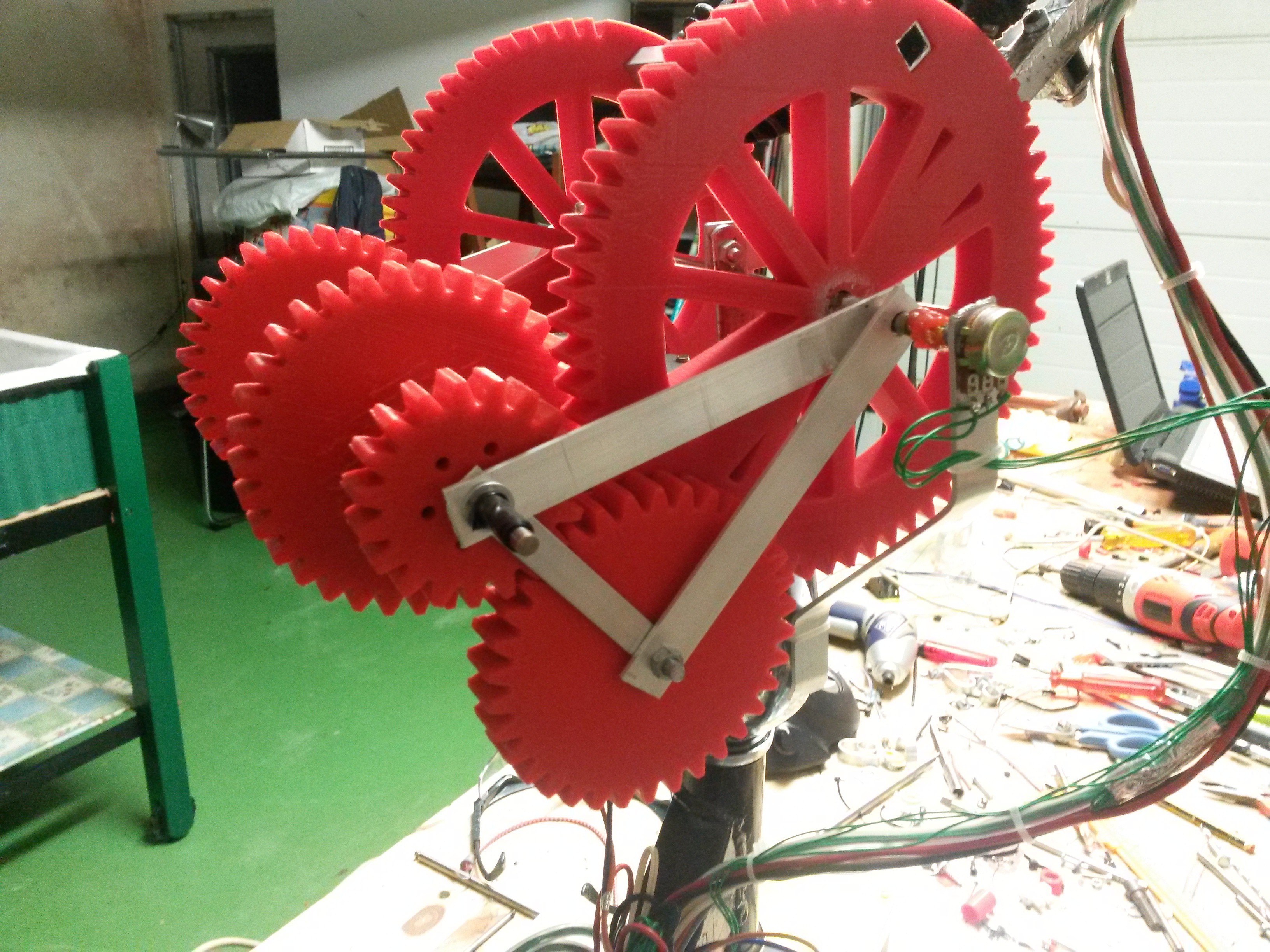
In the shoulder gear system, I modified the wheel where the aluminum profiles are hooked, so the shoulder can rise by 230º, improving the range and maneuverability. I also had to place a series of plates to join the 3 axles of the gear train so that in no case they can be released.
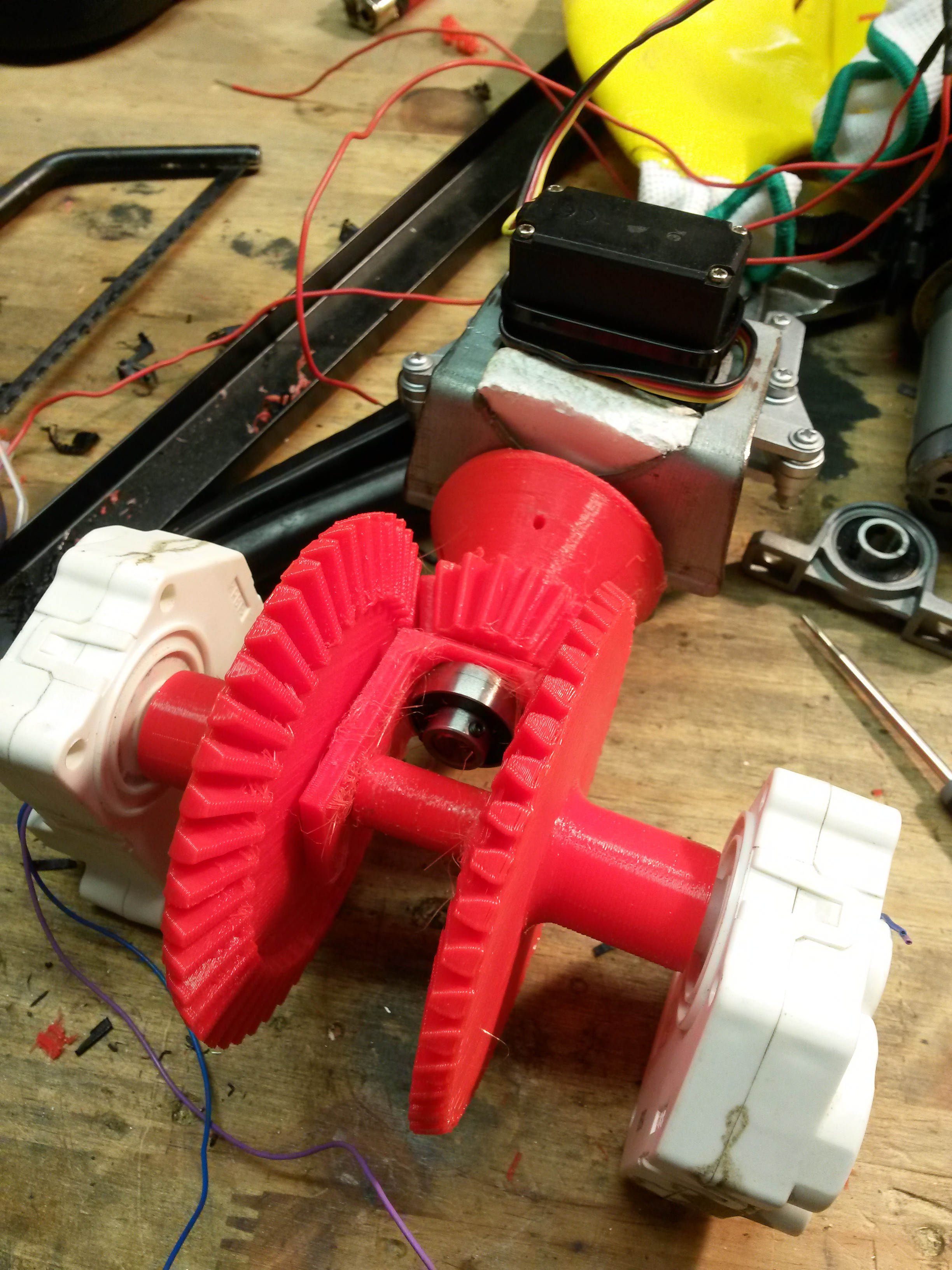
Finally I modified the whole wrist, now uses a semi-differential system so that, with only two DC motors, I can rotate as well as up and down, this design I owe it to the project Thor, by the maker Angel Larrañaga. Motors are recycled from an office printer, these have a speed of 2 RPM, because of this I made a multiplier of 3.5 so that they moved a little faster, as the gears are made in plastic it couldn't hold the weight of 2 KG so i put Inside an aluminum shaft of 10x10 and, inside of this, an 8 mm shaft of steel
As always, new built, new video, here the last one.
Enjoy it, see you soon!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.