Douglas Miller
Douglas Miller-
She goes for a walk and makes a friend...
03/20/2016 at 22:03 • 0 commentsWell, took her to the Midwest Reprap Festival this weekend, all decked out in a shiny new outfit. It WAS a 3D printer event, after all, so I put a delta printer on top of her! Lol. Turned out it was a tab bit top heavy, but she sure looked good. Today was the last day of the festival, so I took the top off and we took her for a walk. Total walk time today: Over half an hour, and all on one battery. :) And nothing broke!
![]()
We had a crowd following us around, snapping pictures. All in all a real great time.. It was on the first walk that she met a new friend: Thanks for bringing R2D2 out to play! Well, played, my friend. Well played!
Anyway, she walks pretty fair, even though we managed to dump her on her face a few times. I'm well satisfied, both with the run she had and the reaction she got. People came from all around the fair when they heard she was out for a walk. Great time all the way around! I'm going to finish a Steampunk top for her, then straighten out the files (they are a mess, scattered over several hard drives here.) When I get that done I'll upload everything and anyone can have a good start on building their own.
I've deleted the parts list on here, because it's so out of date it's better to just start over with it.
It's not over yet, not by a long shot. After this one, how about a metal legged one, and then one we can ride? Because, well, you know. Why not??? :D
-
Busy Week, and small changes...
03/15/2016 at 22:59 • 0 commentsBeen working on getting it ready for MRRF 2016. Still intend to take it there. Building up a body on it, and this one is just for MRRF. In the end there will be at least two 'skins' I can put on it. One will be SteamPunk, and then the one I'm working on now. And, no, I'm not done with it and I'm not going to show pictures of it until after MRRF. You'll just have to wait to see it. Lol.
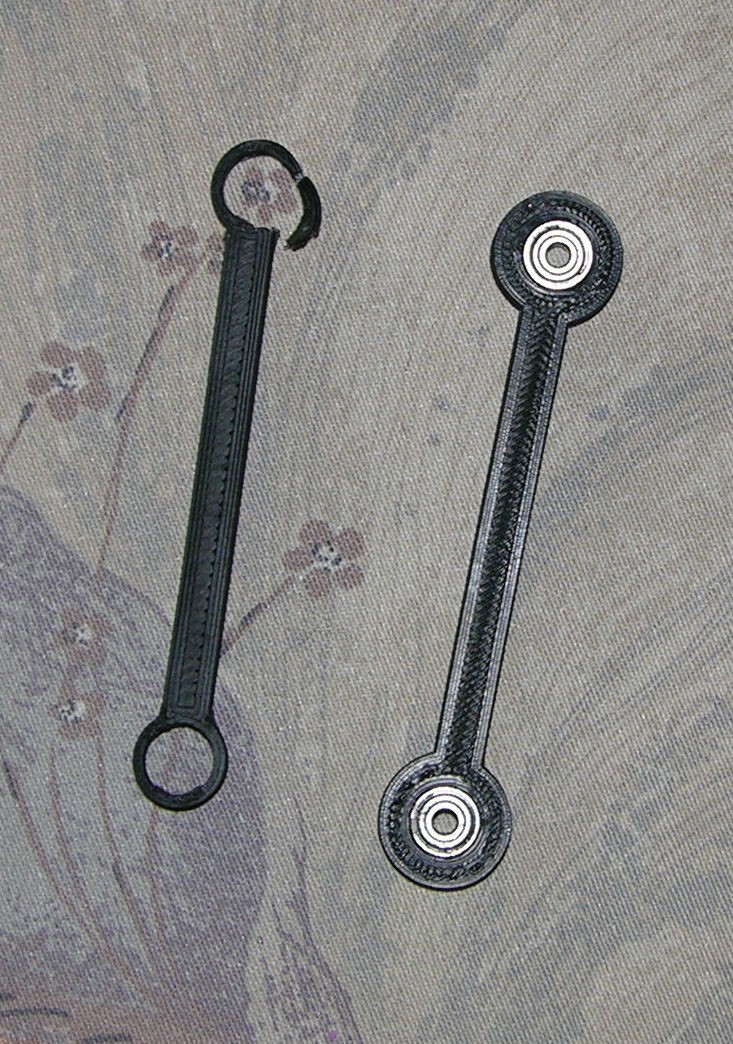
The 'skin' I'm working on now is both heavier and taller than I had planned ahead for, and while it still moves, I broke a few parts playing with it. So I'm printing new ones and getting them installed. You can see in this photo the difference, and where it failed. The one on the right is obviously the new one I'm printing now. Stuff happens.... :P
![]()
Four days left until the show, and I'm sure I have at least five days work to do. But I'll have it there, one way or the other....
-
Now, it walks. Dependably , even!
03/01/2016 at 00:11 • 0 commentsGot a lot of ideas of cool things to add in while making the body of it. Just a matter of having enough time to actually get it all done... sigh.
Lets just say I made a run uptown to the hobby shop today, to pick up some servos. Didn't want to wait on the mail. :D
-
More Progress.
03/01/2016 at 00:05 • 0 commentsFinally got a few days to work on this thing again, and took advantage of it. Still beefing up the legs. The main push rods are doubled and have a clip that holds them together. That allowed me to build cups to keep the bearings in place. Works great! I also drilled down through the nuts on the cam shaft and right through the rods. No way can the torque undo them when running in reverse now!
![]()
![]()
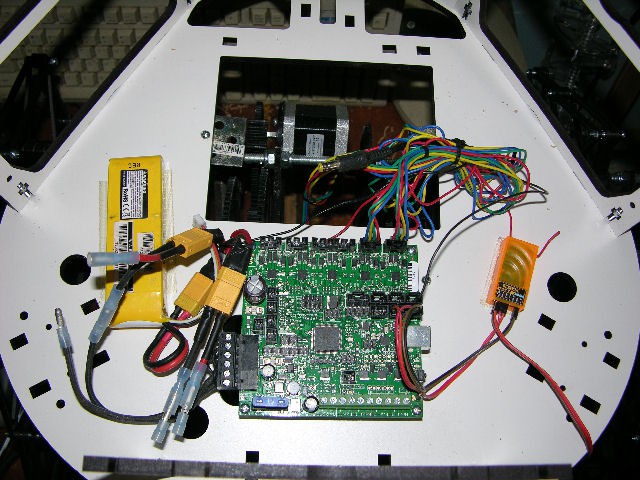
Started on a base for the body to come, and worked on getting the wiring under control. Things are getting nailed down instead of just hanging loose. For a while there it looked like it was dragging it's entrails behind it as it moved...
![]()
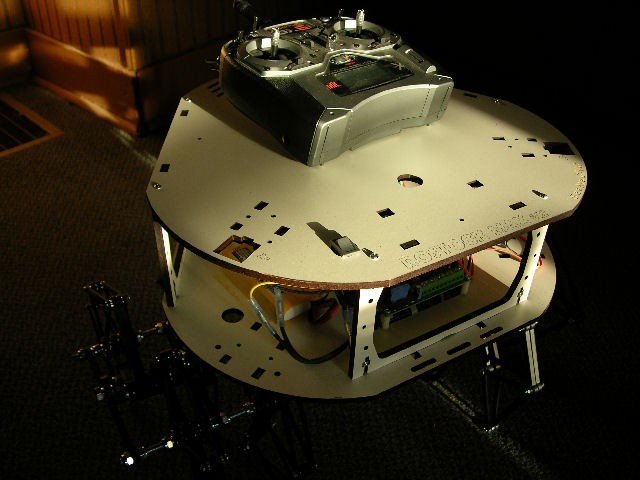
All in all, it's starting to look and act like I imagined it would when I started this project. Still a lot of work to do to get it where I want it, but it's moving more into the body, and the way it will look when other people see it. Me, I'm sure I'll always see the guts of it every time I look at it, every single piece, nuts, bolts and over stressed pieces of plastic.
![]()
![]()
![]()
-
Now, THAT'S better!
02/22/2016 at 00:23 • 0 commentsOkay, I know this video sucks. But I can explain. Lol. Been a busy few weeks on higher priority projects, and I have some boards coming tomorrow so I'll be busy on other stuff again.
Finally got back to this over the weekend, and wanted to get a video up showing how it's going, but the lights in that room suck, and anywhere else the dog would tear into it as soon as it starts to move. So I'm stuck with that lighting for the night. How is it going? Much better, thank you! I drastically beefed up the push rods, modified the legs a bit to spread them out and give them less bend, and made a few other small changes. Oh, did I tell you I gave up on those high speed motors? Well, I did. But instead of ordering more I went the cheap route and pulled some stepper motors off the shelf, tossed in a Rambo board I had sitting around, and changed the motor mounts to hold the steppers. NOW I have control! The speed in the video is about 25% of top speed. I'll work out any more bugs before I run it at fun, er, I mean full, speed. I still want to get this done in time to take it to the midwest reprap festive coming in a few weeks, but it's looking like it's going to be close. With any luck I'll get it done (last minute, I'm sure) and if you come to the MRRF we can run it around and break it in a loud and messy manner in front of a few hundred witnesses. :P
-
Big Changes Afoot.
01/07/2016 at 19:45 • 0 commentsHeck with it. I'm making some changes. Okay. MORE changes. What, you didn't know I was making this up as I go? Well, Surprise, I am! Anyway, on to the changes...
After some whining, and just a little bit of begging and groveling, I managed to talk Steve, the head honcho over at SeeMeCNC, into letting me into his stock of bearings. Soooo.... I'm changing the files, reprinting about a third of the parts, and adding bearings to all the little joints in the legs. 64 bearings, to be exact. And while I was adding bearings, I thought 'why not just beg a little more?' and Steve hooked me up with some of the larger bearings to go on the push rods connected to the cams. Hell, why not?
Got the first leg done and almost done with the second one. They spin very freely with the touch of a finger now. My Rostock Max V2 printer is doing it's thing, and in only a day or so this change should be done. Good deal.
I'm not scared to hang my dirty laundry out in public. I took on this project to have some fun and learn a few things, and so far I'm doing just that. Could I have thought this out a bit better before I started? Sure. But where's the fun in that? Lol.
-
BOM coming along.
01/05/2016 at 10:56 • 0 commentsWorking on getting BOM in.
Couple of notes:
The RC transmitter and receiver can be whatever you have. The battery, wiring, connectors should all be rated for whatever motors you pick up, as well as the speed controllers. My speed controllers happen to be for 7.4 volt, so I went with a 1300 2S li-po battery. (had them on hand here, so it's what I used.)
The transmitter should have at least 5 channels if you want the works on yours. Right stick controls forward/back and left/right. Left stick will be for the camera gimbal. The last channel I'm going to use the flap switch to toggle video recording on/off.
It's a lot of parts to 3D print. Total print time is around 28 hours for everything. I intend to get a laser cut version as soon as I can get to it. I have the laser here, might as well use it for another version of this beast. :D
3D printed files should be up by the end of today, with any luck. Assembly instructions as I can get to them...
-
It's like trying to clean the space shuttles windscreen in the middle of a launch....
01/04/2016 at 19:20 • 0 commentsSpent the weekend regiggering things. Changed the legs a bit so they are each a little wider for more stability. While I had that apart I offset each leg from it's matching partner in the same row. That was so I could use my cute little feet without them knocking each other around when they came together at the center. Seems like it will work fine.
So got up today with the intention of making a decent video of it walking, which it does fairly well now, and promptly broke it again. :( The problems all come down to speed. The motors are just too damn fast for this use. This thing is a rocket, I can tell you that!
Reusing these motors was a bad idea. There, I said it. A real bad idea. Found the specs on them, and they run at 7,200 RPM, and that's simply ridiculous for this use.
So. What I'm going to do is shop for some motors that better fit this project. I hope to find some the same form factor, so I don't have to redesign the motor mounts. I don't see any sense tweaking things on the margins here, it's like trying to comb your hair standing out in a hurricane. :P
As soon as the motors get here I'll shoot some video of it walking, not trying to get off the ground. :)
-
A few more thoughts...
12/22/2015 at 19:46 • 0 commentsTo that last Project log I should add that the turning was intentional. If that didn't work then many of the ideas I want to add to this thing just won't work. BUT. Yes, there is a but. But it's still a bit hard to control. Most of that is in the firmware and the way I have it balancing out the two channels. That's going to be a main focus of mine now. I'm also thinking about adding another gear stage. Right now I can't use more than about 25% throttle or she'll take off at about 40 miles an hour. The motors came off a fairly large helicopter, so are turning pretty fast. I could buy different motors, or gear these down even more. Care to guess which way I'll go? :D
-
Baby's First Real Steps. Such a Proud Papa.
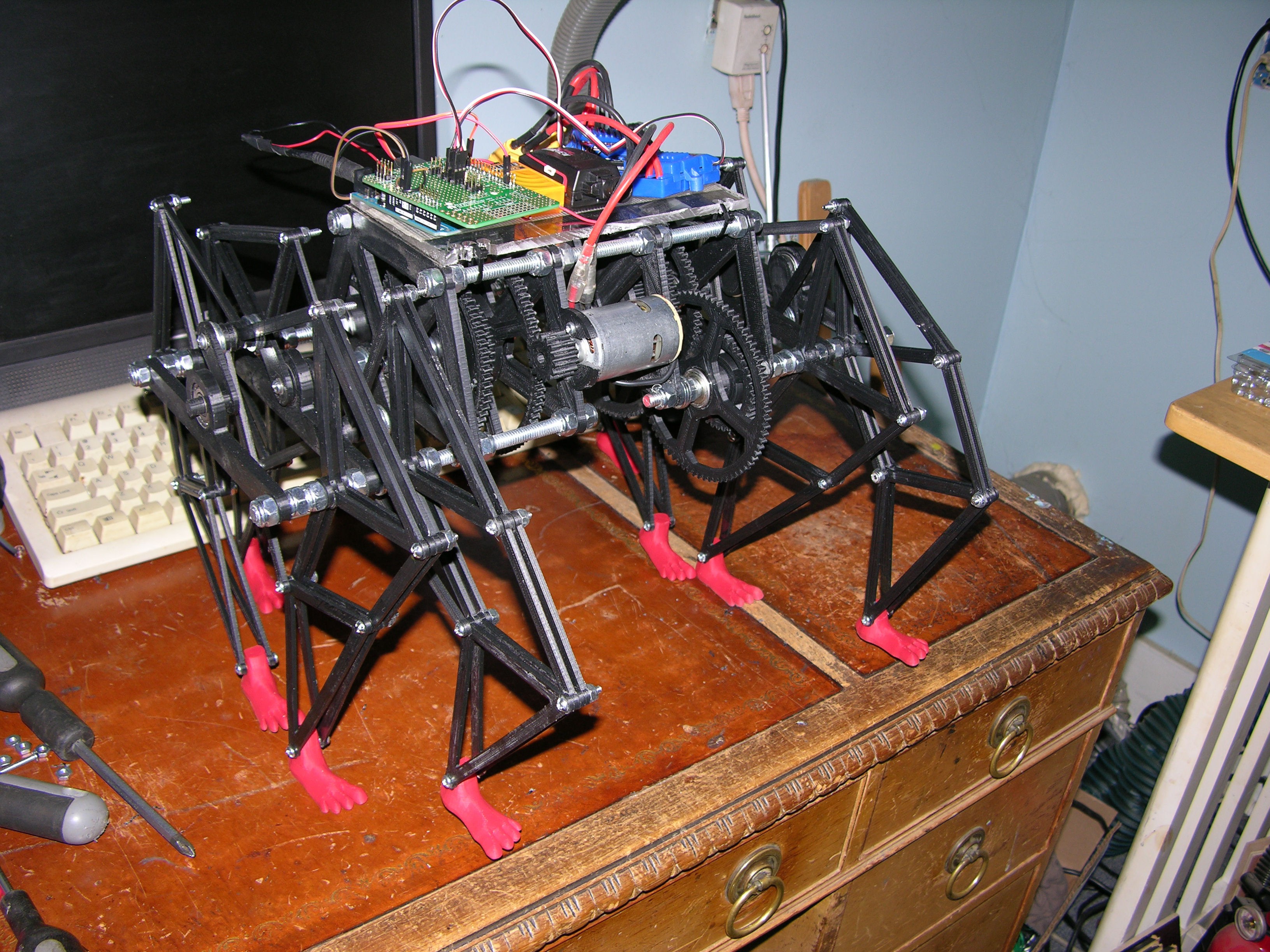
12/22/2015 at 19:34 • 0 commentsFixed everything I broke and put her back together. Even printed up some feet for her, which i think look cute but need redone. They aren't balanced right so they don't work like I wanted, and they are also a bit over sized and tend to hit each other.
I used a little prototype board from Radio Shack that's been sitting on my shelf for, well, probably for about as long as it sat on the shelf in the Shack. It's pretty much just a power distribution board and a way to make it handy to hook all the wires together. All the electronics are just piled on top, and next I'll have to get all that mounted securely. I like the way the battery dragged behind it. Lol. NOT.
She does move, but as you can tell I need to firm up those legs. Too much weight, and when she turns she'll bend them. But she DOES turn, forward and back. Something tells me I'm going to spend the winter playing with and improving this thing. :)
Here's a short video of her first real walk, short as it was. Sorry about the video quality, but first steps are first steps, and I'm stuck with this video of them. Next time I'll actually spend some time getting the cameras setup and adjusted right before I start. Guess I was just too excited to get her moving to think of it at the time.
Now, to get to work on that BOM....
![]()
Remote Control Land Strider
I got it in my head to build a Land Strider, pretty much just because I think they're neat.