-
V2.0 assembly and testing update
04/20/2018 at 18:02 • 0 comments
V2.0 3D printing completed.
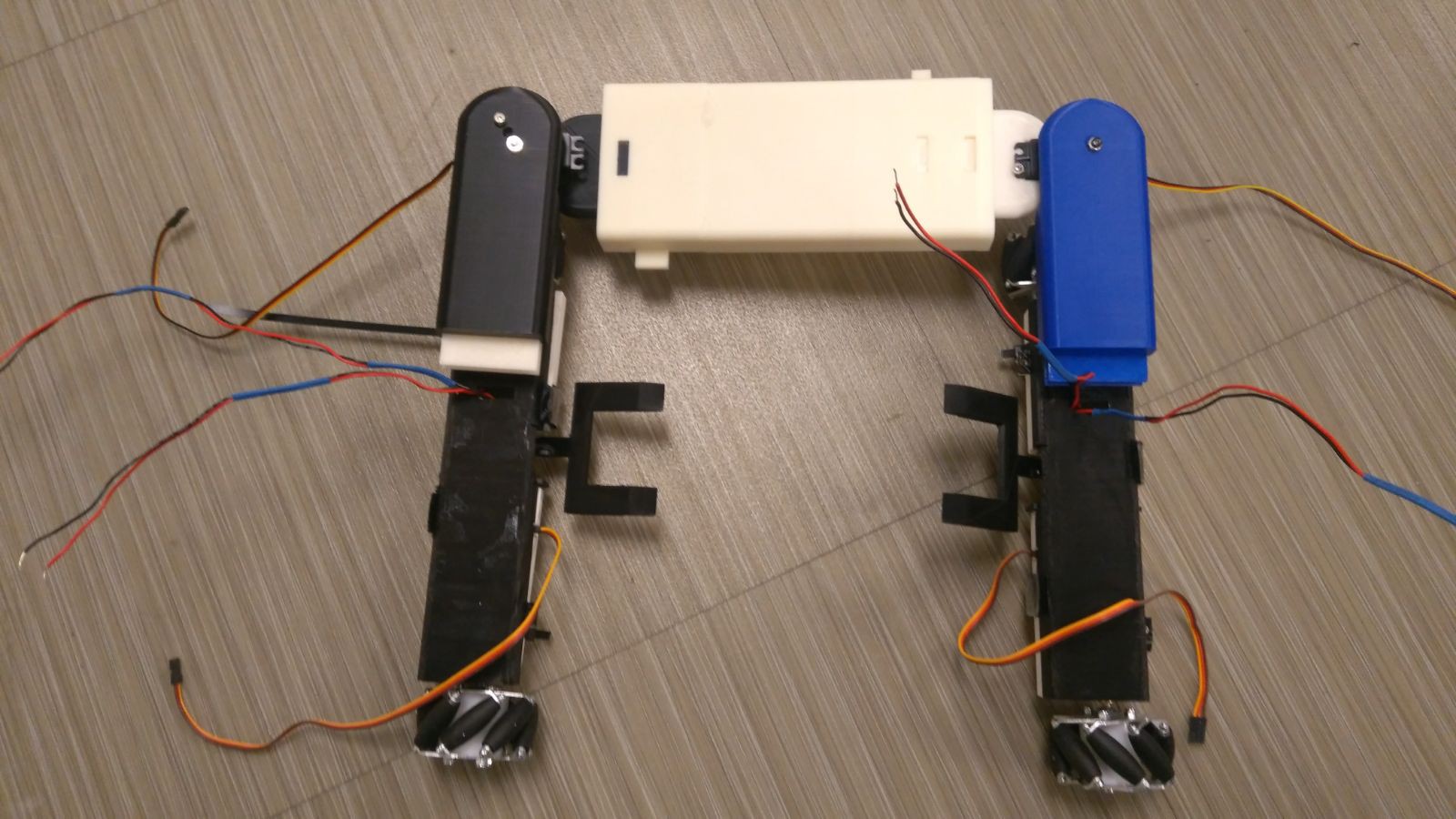
Assembled the parts with motors, motor drivers, arduino, and servos.![]()
Robot in snake mode.
![]()
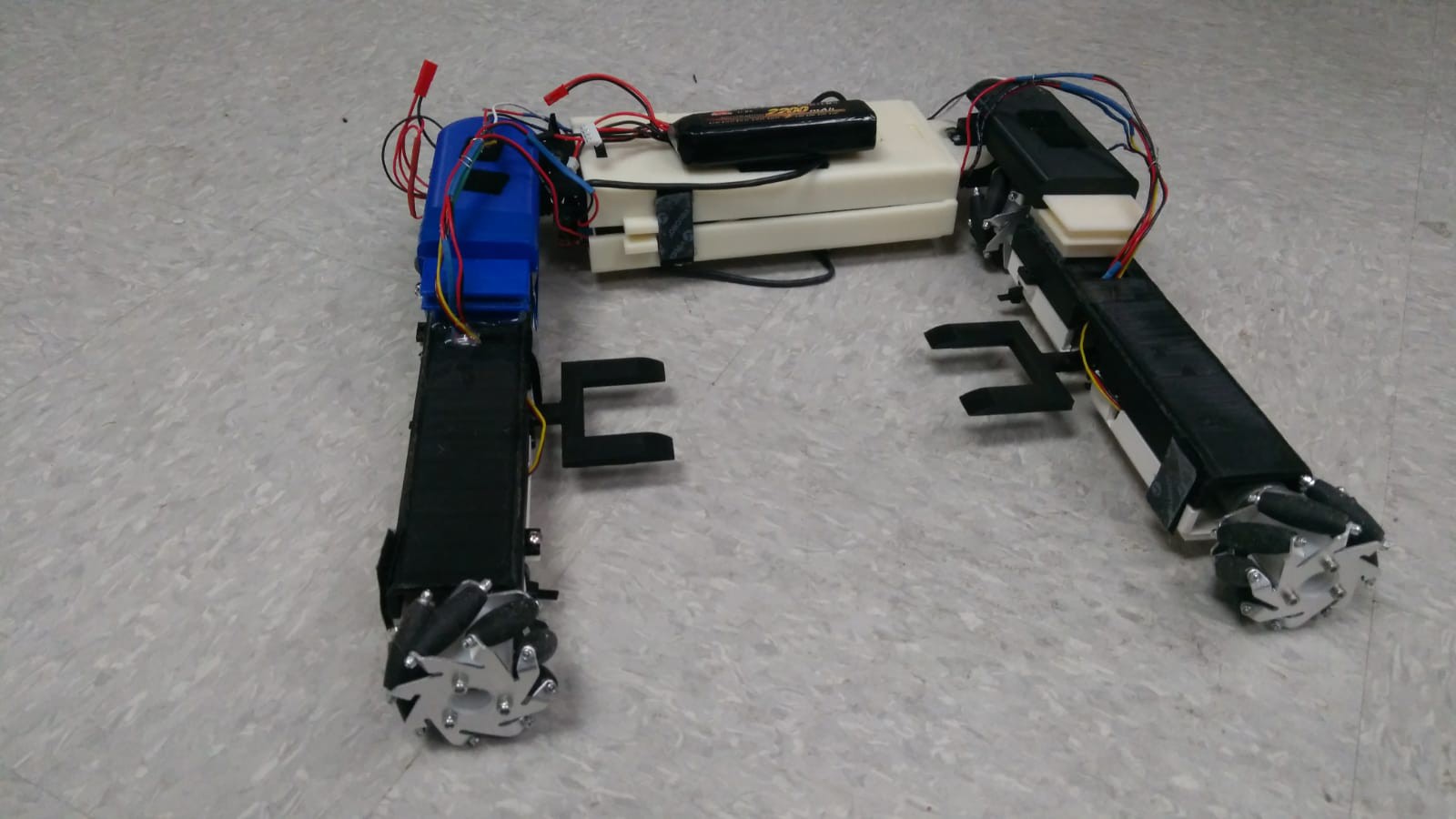
Few upgrades like, lipo battery the robot is ready for testing.![]()
Robot carrying a box.
![]()
-
V2.0 Update_2
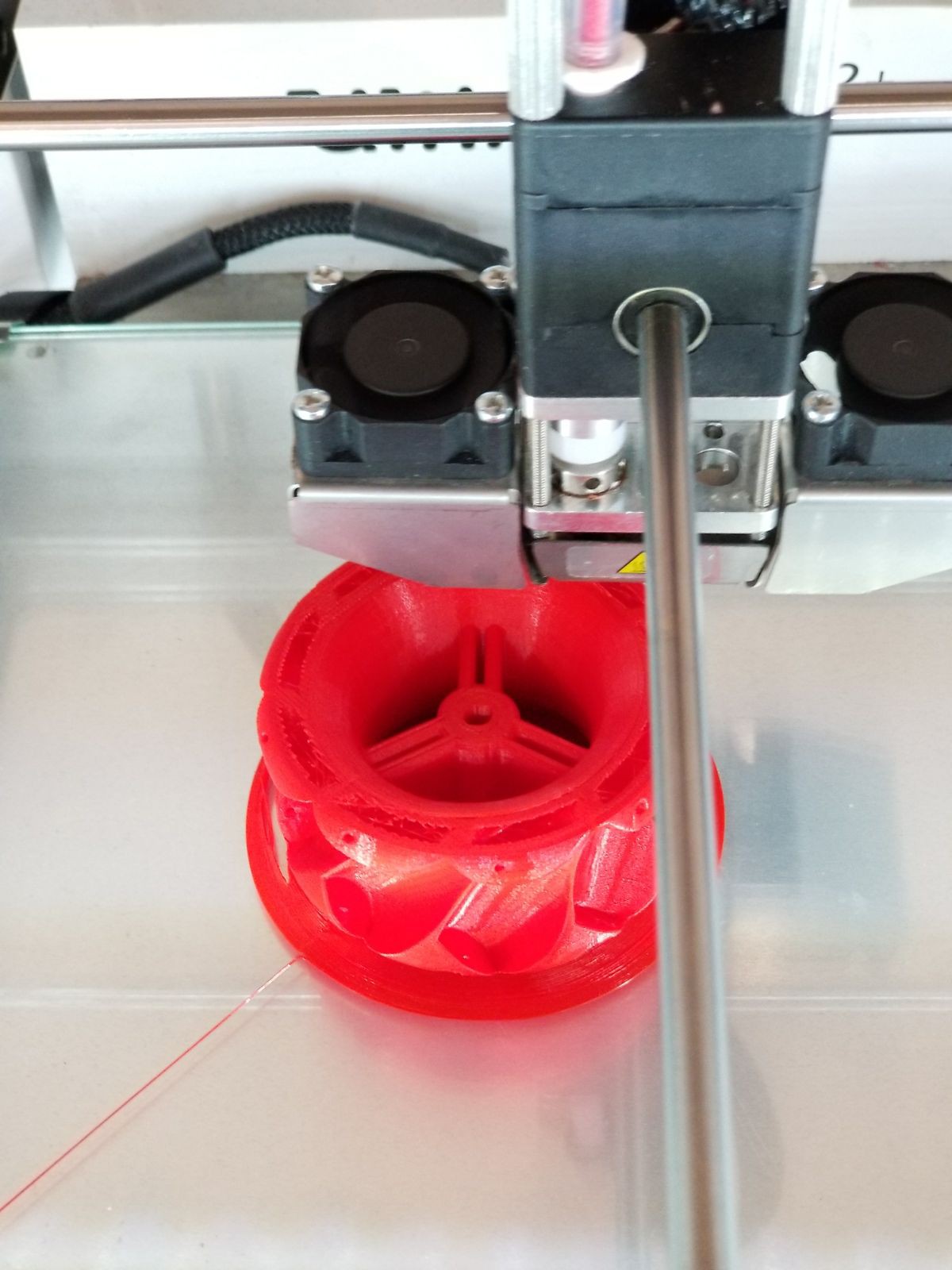
03/31/2018 at 02:33 • 0 commentsReceived mecanum wheels.
![]()
The size is 60mm.
![]()
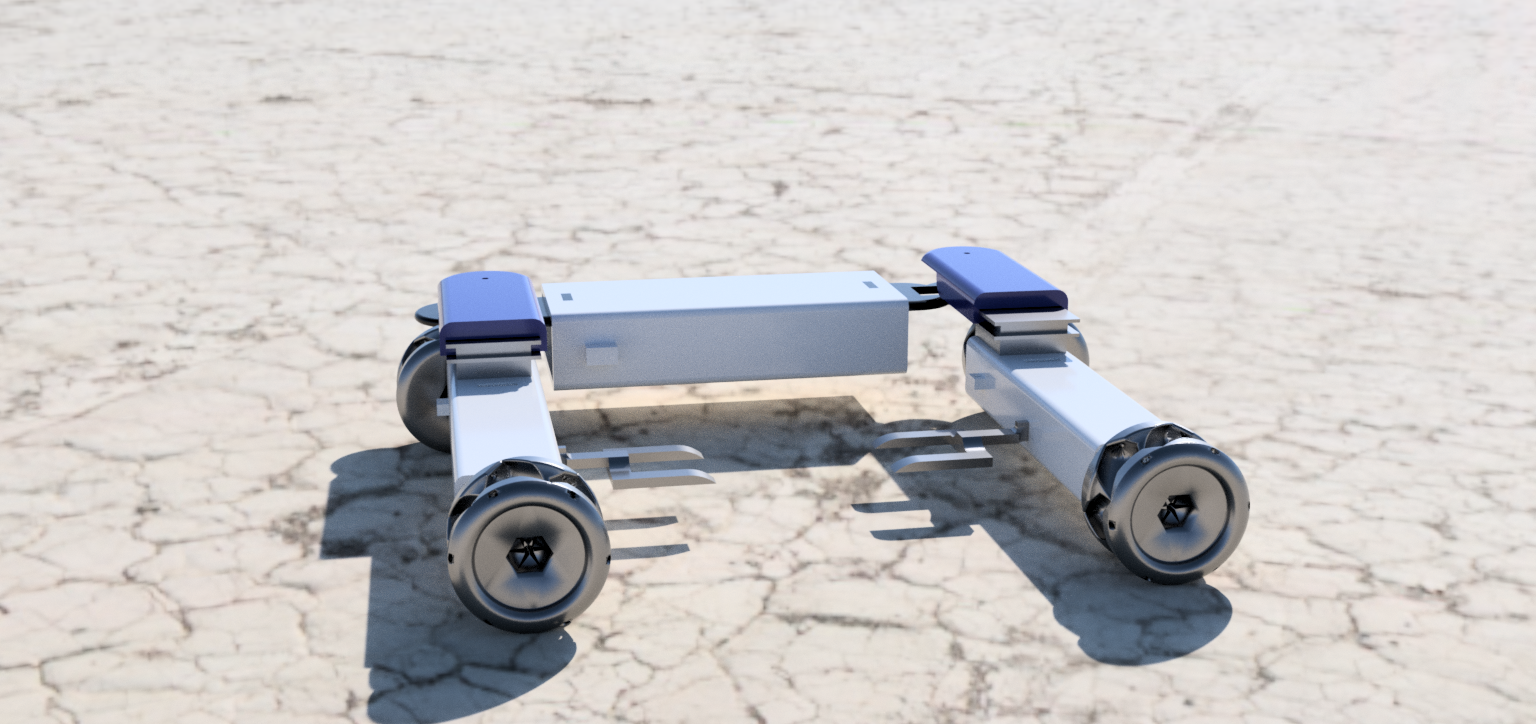
Rendered image of the robot with forklift.![]()
Rendered image of Robot carrying the object using forklift![]()
-
V2.0 Update
03/16/2018 at 15:43 • 0 commentsV2.0 build log:
Resizing the wheel to 60mm. We observed that the wheel was too small to have a ground clearance. So the wheel is being upgraded now.![]()
We are also planning to include 2 servos on the joints to control the wheel axle. This increases the stability and flexibility of the robot.
Project ShapeShift
This is a robot which can change it's shape. Yes It does! It looks like a regular car and changes to snake! It sounds weird but why not!