0%
0%
Mr. Gibbs
A powerful, inexpensive, and extensible tactical sailing computer
 Brook Patten
Brook PattenBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 The crows nest: In Situ
The crows nest: In Situ Excuse the poor photoshop, I didn't get an actual picture of the hackjob prior to its destruction
Excuse the poor photoshop, I didn't get an actual picture of the hackjob prior to its destruction
 Perhaps the kind engineers at the US Naval Research facility can help me troubleshoot my GPS.
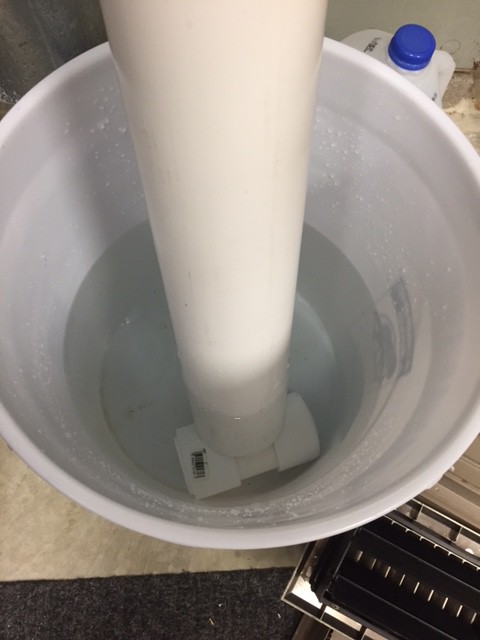
Perhaps the kind engineers at the US Naval Research facility can help me troubleshoot my GPS. Preparing to water-depth test the mast sensors
Preparing to water-depth test the mast sensors The old stars and stripes kite is not my fastest, but it seemed fitting given the venue.
The old stars and stripes kite is not my fastest, but it seemed fitting given the venue.















 Lars Knudsen
Lars Knudsen
 Bruno Laurencich
Bruno Laurencich
 sparks.ron
sparks.ron
 qquuiinn
qquuiinn
Hey Brook! I came across this while looking for a debounce circuit for my Peet Bros Anemometer. I had one on a breadboard and tried designing a PCB for my first time, they arrived but didn't work!
I've tried software debounce with no luck, the breadboard one worked amazing (couple resistors and a capacitor for both switches going through a Schmitt trigger)
I'm wondering if you could share how you tackled this! I'll include a link to a picture of my schematic that didn't work (I wish I'd not taken the breadboard apart, will have to start over maybe).
https://imgur.com/a/65fFt3y