deʃhipu
deʃhipu-
Mechanical Improvements
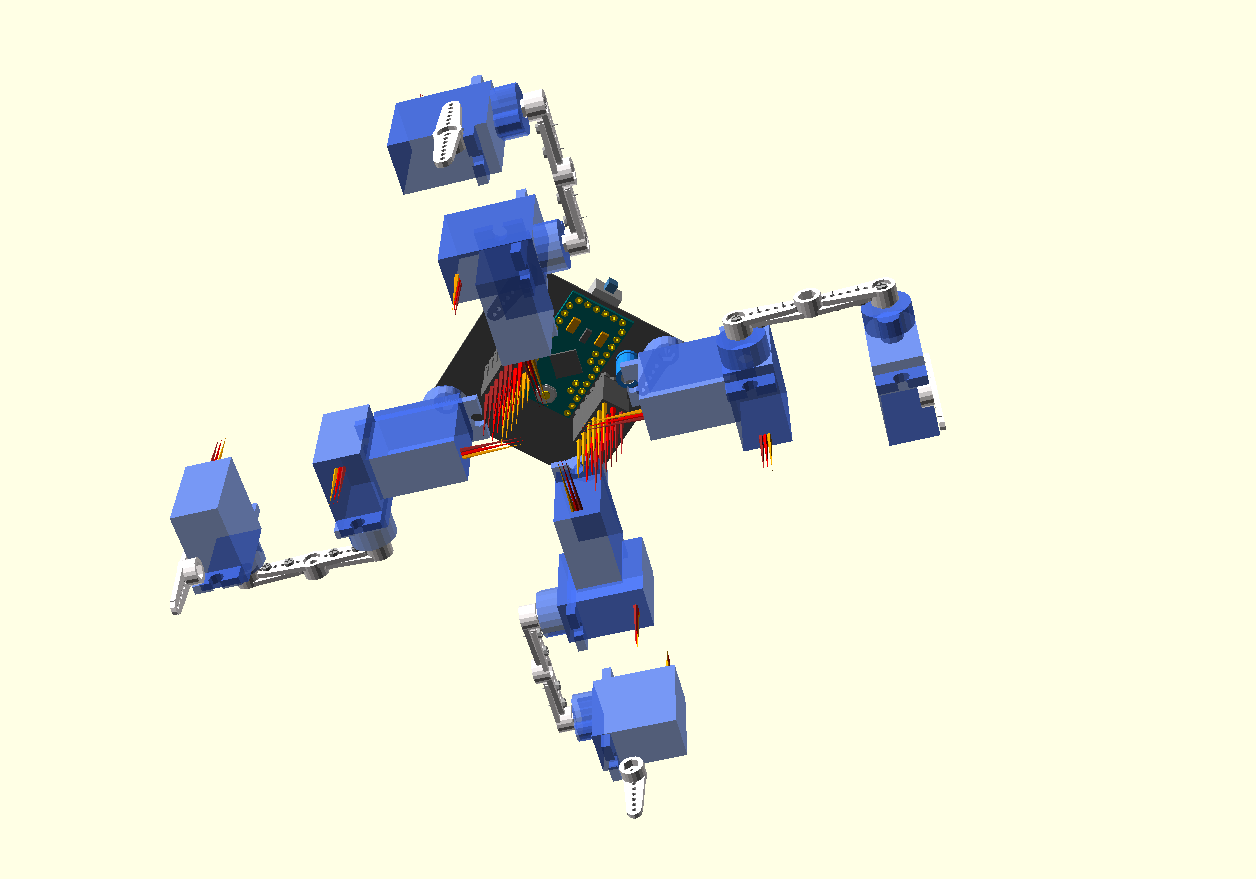
02/29/2016 at 22:57 • 0 commentsWhile I'm still waiting for the parts, let's talk about the improvements I made in the mechanical design. It's not that much, but I think they make a nicer looking and slightly more capable robot.
![]()
First of all, the positions of the servo horns on the PCB have been changed, to provide more room for the electronics, make it easier to adjust the servo positions, and hold the horns themselves in a more stable manner.
Second, I'm no longer using the screws that come with the servos -- they are supposed to be used for attaching the servos themselves, not the horns, and thus are too big. I have two big bags of really small screws that will fit the horns perfectly and not even stick out.
Third, and this is the only change that actual impact on the gaits, the leg order and shape changed. They now have longer coxa -- because this is the only dimension that doesn't affect the servo strength), and are mirrored compared to the original Tote, allowing for more travel. This should make Tote slightly faster.
And finally, almost all components are on the bottom side of the PCB, so that the top can be used for any additional sensors or payload you want (it does make sense to move the battery there, though).
-
Workshop Preparations
02/29/2016 at 11:48 • 4 commentsSince my workshop was accepted, I started preparing for it. First of all, I went and ordered all the required parts from Aliexpress, since you can never tell how long it will take them to reach here. I split the order into many small packages, so even if some of them don't arrive on time, I will be able to replace them with the parts from my personal stock.
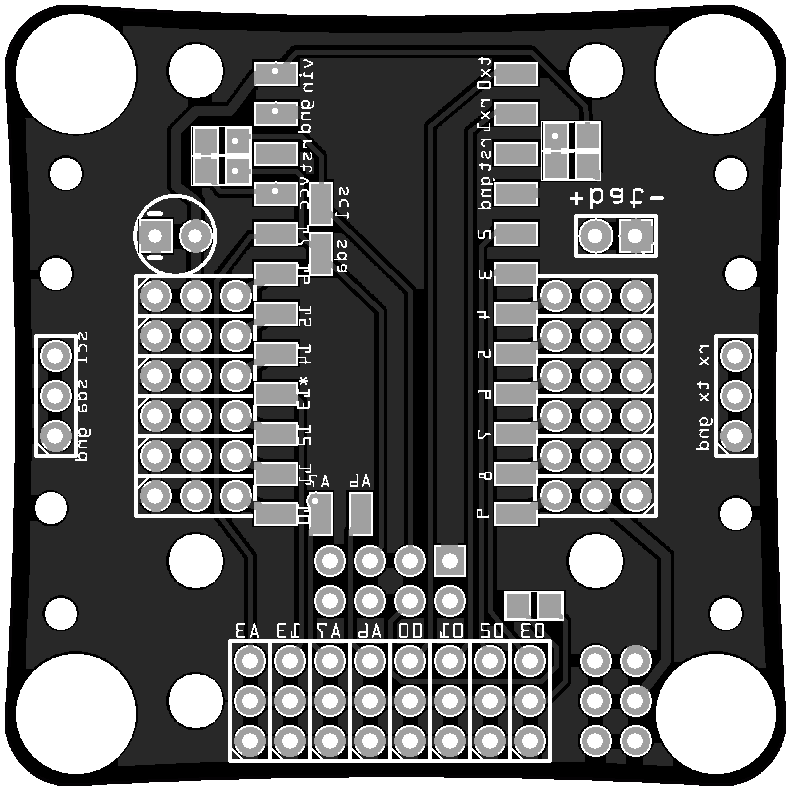
Second, since I needed to order the printed circuit boards, I decided to redesign them a little bit, both to include the Jolly Wrencher logo, and to include some of the improvements that I came up with since the last iteration. More on that later.
![]()
![]()
Once the boards and parts are here, I will need to build and test one prototype, and then pre-assemble all the boards. I think that at the least I will have to do all the soldering -- because I really don't think I will be able to teach people to solder during the workshop, and I don't want injuries.
While building the prototype, I will make the photographs illustrating all the steps, and upload them here as the instructions. Then I will have them printed for the workshops.
Finally, there will be some changes in the software. I already did some preliminary experiments, and I think that I can make the whole thing much easier to experiment with.