 zakqwy
zakqwyLots of stuff shipped today (including the CFRP stock!!), so this evening I decided to dig into a few things on the list.
Sensor data
I wrapped up the functions for pulling data out of the magnetometer and gyroscope. Other than the Y and Z gyro axis (which are extremely noisy), everything looks good:

Code is in the Dropbox repo under /firmware/ArduinoDue/_9DOF_test3. I'd love some help on a few things:
- If you dig through my code (_9DOF_test3.ino to download the Arduino source code, or _9DOF_test3.c to view the program in a browser), you'll see that I had to putz around quite a bit with two's complement conversion to pull integer data out of the three sensors. The accelerometer uses a 10 bit ADC, while the magnetometer's ADC is 12 bit and the gyro is a 16 bit device. There has to be a more efficient way to turn those byte pairs into useable signed data. Any thoughts?
- Why are channels Y and Z of the gyro so darn noisy? I guess in the grand scheme of things they really aren't too bad; for the gyro, the Y axis is scaled in deg/s and they're scaled 0-2000. Okay, so 0.5-1% noise. Alright, maybe that's within spec for the instrument. Even so... why is the X axis so clean in comparison?
- Everything else looks nice. I'll run some analysis on this data like I did with the accelerometer data previously to get a picture on noise normalcy. Still clicking along at over 300 samples/second, which is faster than the magnetometer spits out data.
Reinforcements
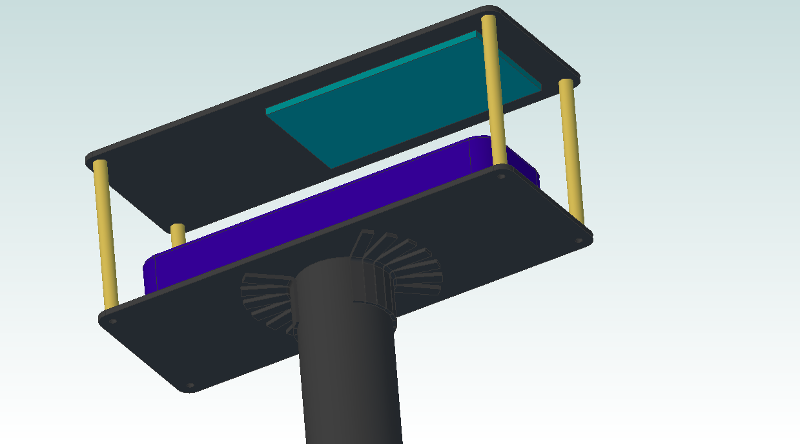
These aren't finalized by any means, but I added a few reinforcements to some of the joints in v08. First, some 5mm chunks of angle stock to beef up the battery plate connection (you can see the Arduino Due model, too):
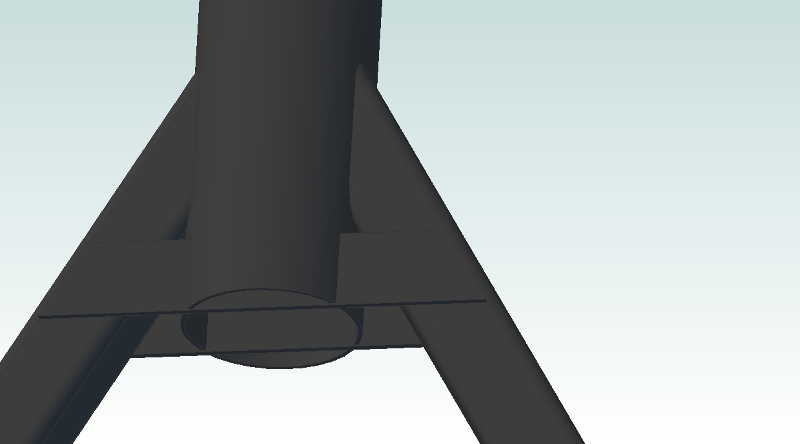
Next, a few strips of 1.6mm CFRP plate for the main tube joint:
... and a few triangular gussets near the pitch ring bearing mounts:
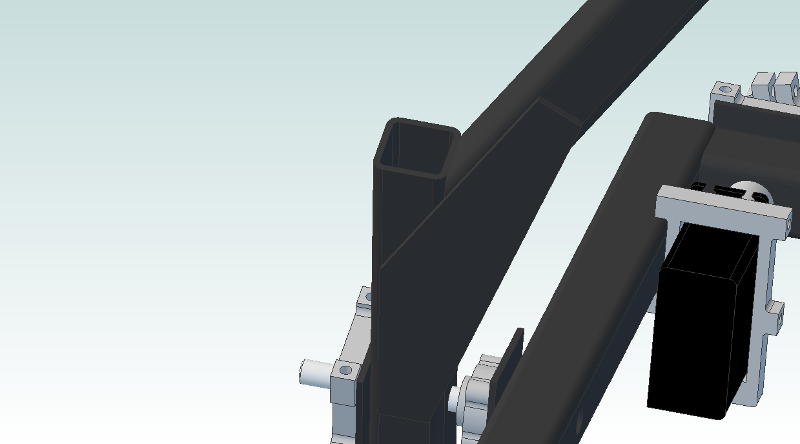
As Dave suggested in a comment several days ago, I need to re-check pitch ring range of motion vs propeller interference again, especially with the new gussets.
More to come. Comments welcome!
- Zach
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Are you sure? yes | no