 Josh Cole
Josh Cole-
Gear Contact Calculator
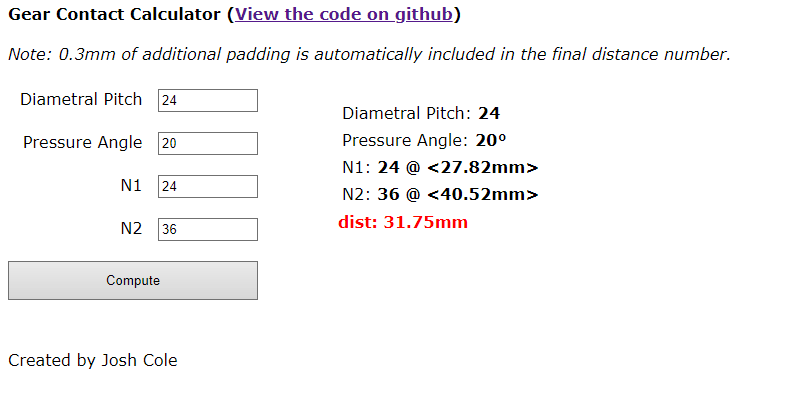
06/15/2020 at 05:08 • 0 commentsI threw together a super simple gear contact and size calculator. Input gear details, output is distance to space them from each other (and size of gear, evaluated as dp + 2*a):
https://sharpcoder.github.io/gear-utils/
![]()
-
Gears Academy
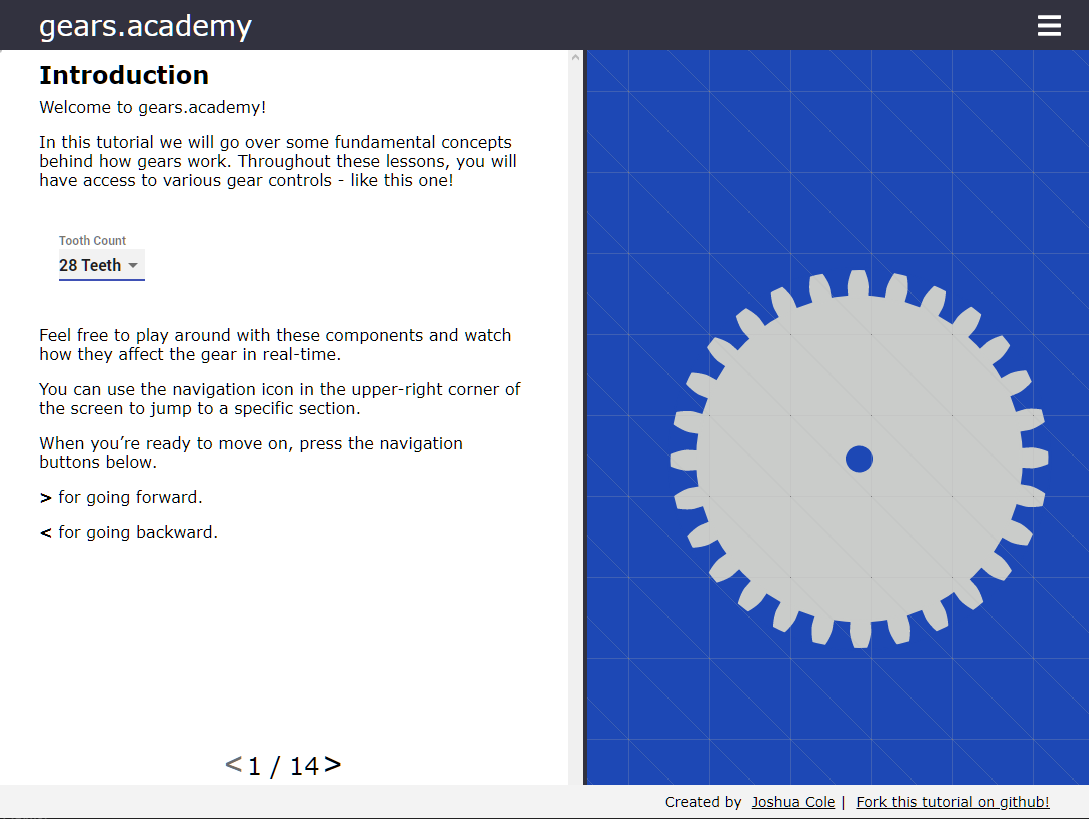
02/02/2020 at 22:02 • 0 commentsI've been working on a software project recently called http://www.gears.academy/ and the idea is to accumulate all the knowledge I can about how gears work, how they're designed, and how you can 3D print them.
In order to help convey the ideas, I wanted to make an interactive gear viewer to allow people the ability to tweak variables and see how it impacts the final shape of the gear. So far it's coming along great! If anyone has ideas for improvement, suggestions about what kind of content might be helpful, or wants to contribute - all the code is on github. https://github.com/SharpCoder/gear-academy![]()
-
Idea: levitating motor
07/04/2018 at 20:18 • 0 commentsI'm obsessed with the concept of a "levitating motor" and I would like to do some tests eventually which involve electromagnets. Technically the motor would not have to levitate. I'm more interested in whether I could control the position of a circular platform which has a magnet on it by pulsing an array of electromagnets which are strategically positioned around the platform.
This is kind of how a stepper motor works, right?
My theory is that it would be possible to adjust the position through acute pulses. Maybe even with a high degree of precision. On the other hand, I suspect it would require an inordinate amount of energy to do correctly and it may have a lot of heat dissipation issues. Plus I suspect it would not be able to sustain much weight. Also I guess it would be acutely susceptible to other electromagnetic forces, so maybe the top part of the platform would require shielding... The odds are against me and this is probably going to be one expensive motor, haha.
But it would be really cool if the position of the motor were determined by back and forth pulses rather than "steps". I envision a world where I can give a rotational angle rather than an amount of steps and the motor would be able to point to that location.
Perhaps someday I will have enough time to investigate the feasibility of this kind of design.
My Projects
My Pages
Things I've Built
The "Foundry" workbench
This is a workbench which I created from scratch and it is now the workspace for all my projects :D
pi-mei
ESP8266 on an ATMega328p. The idea was to have it contact an AWS Lambda function constantly while it had power so I could graph the uptime / solar panel efficiency. https://github.com/SharpCoder/esp8266-arduino
Car audio unit
This is one of those 90% complete projects I never finished, but it got pretty far. Using a raspberry pi and a pi-compatible touch-screen I created/programmed this audio unit for my car.
rpi-kernel
I wrote a heavily commented, baremetal c++ kernel for the raspberry pi. https://github.com/SharpCoder/rpi-kernel
Projects I Like & Follow
 filip.szkandera
filip.szkandera Daniel Nikolajsen
Daniel Nikolajsen Mitsuru Yamada
Mitsuru Yamada Ben Steer
Ben Steer Val
Val Zack Freedman
Zack Freedman Eddie
Eddie Xasin
Xasin Sajiv Shah
Sajiv Shah kristina panos
kristina panos Simon Merrett
Simon Merrett Awesome Makes
Awesome Makes FreemanGordon16
FreemanGordon16Share this profile
ShareBits


Thank you for liking my #PERSEUS-8 homemade 6502 computer !

Of course! It looks like a very cool project. I am especially loving the detailed project logs. Nice job.
Hey Josh, thank you for liking my project. You've got some great projects, I especially like pisolaris. Stay safe!

Hello, thanks for liking my 4DOF Robotic Arm <Copernicus> :)


Hey Josh ;-)
Thanks for the double whammy on #Starcrete , and thanks for the interest :-)
I just updated, I've now managed to make some tiles... Testing to follow... Where's my goggles Muahahaha!

Not sure there would be enough start light for this spectrometer, and with only 18 channels at 20 FWHM each I am not sure you would see anything interesting, but at ~$25 it wouldn't cost you much to find out. Maybe a full moon selenophotospectrometer!
Of course! It is a very cool idea. I have often wondered how one might make an electronic spectrometer like that. I am currently building a motorized telescope and would be really fascinated to play around with the idea of integrating a spectrometer into the telescope itself.
Thanks a lot for the follow!
You have some pretty neat projects yourself, I especially like the hexagonal backpack addon :>