Jonathan Kelly
Jonathan Kelly-
Refactoring architecture
10/13/2017 at 02:20 • 0 commentshave been refactoring code and architecture before seeing how system will handle the data from multiple nodes operating simultaneously. I am concerned the bandwidth and reliability will suffer when I have multiple nodes.
-
Refactor of messaging protocols done - next steps
10/10/2016 at 06:44 • 0 comments1. I have rewritten the software to use the new communication protocols as per the specification document.
The process threw up a few shortcomings with the spec but nothing major - mostly found I needed to add a few extra calls. I need to properly update the spec document to reflect the changes.
The process of changing the protocols also picked up some problems with the system that was slowing down the communication speed and potentially dropping data. Coupled with the pruned back messaging size, the data flow between the various components should now be a lot more efficient. This seems reflected by what seems to be a smoother screen display (this a bit subjective though).
The code still needs a big refactor as mostly I just replaced the communication interfaces and left the rest of the code untouched. It is still pretty hairy code.
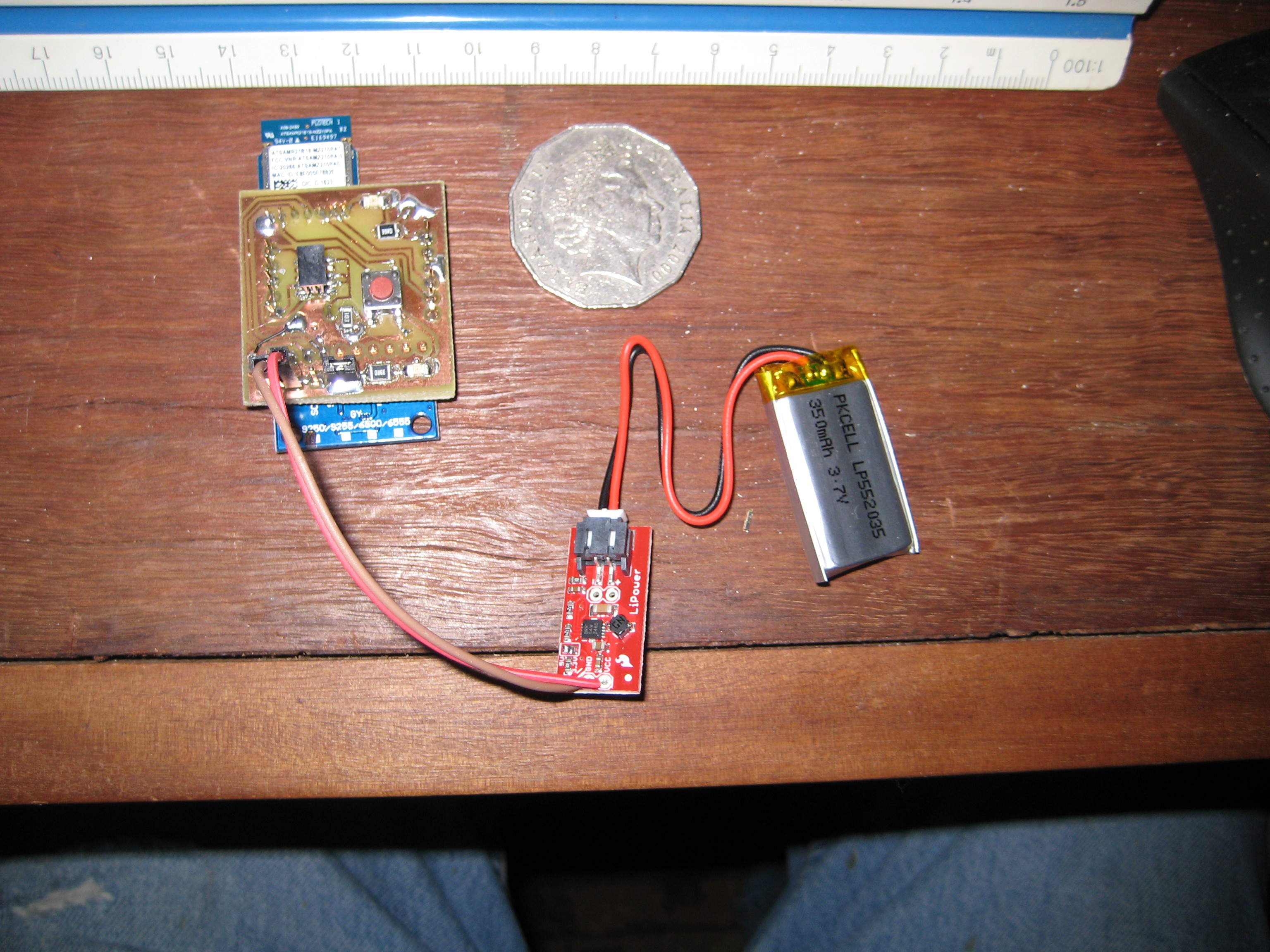
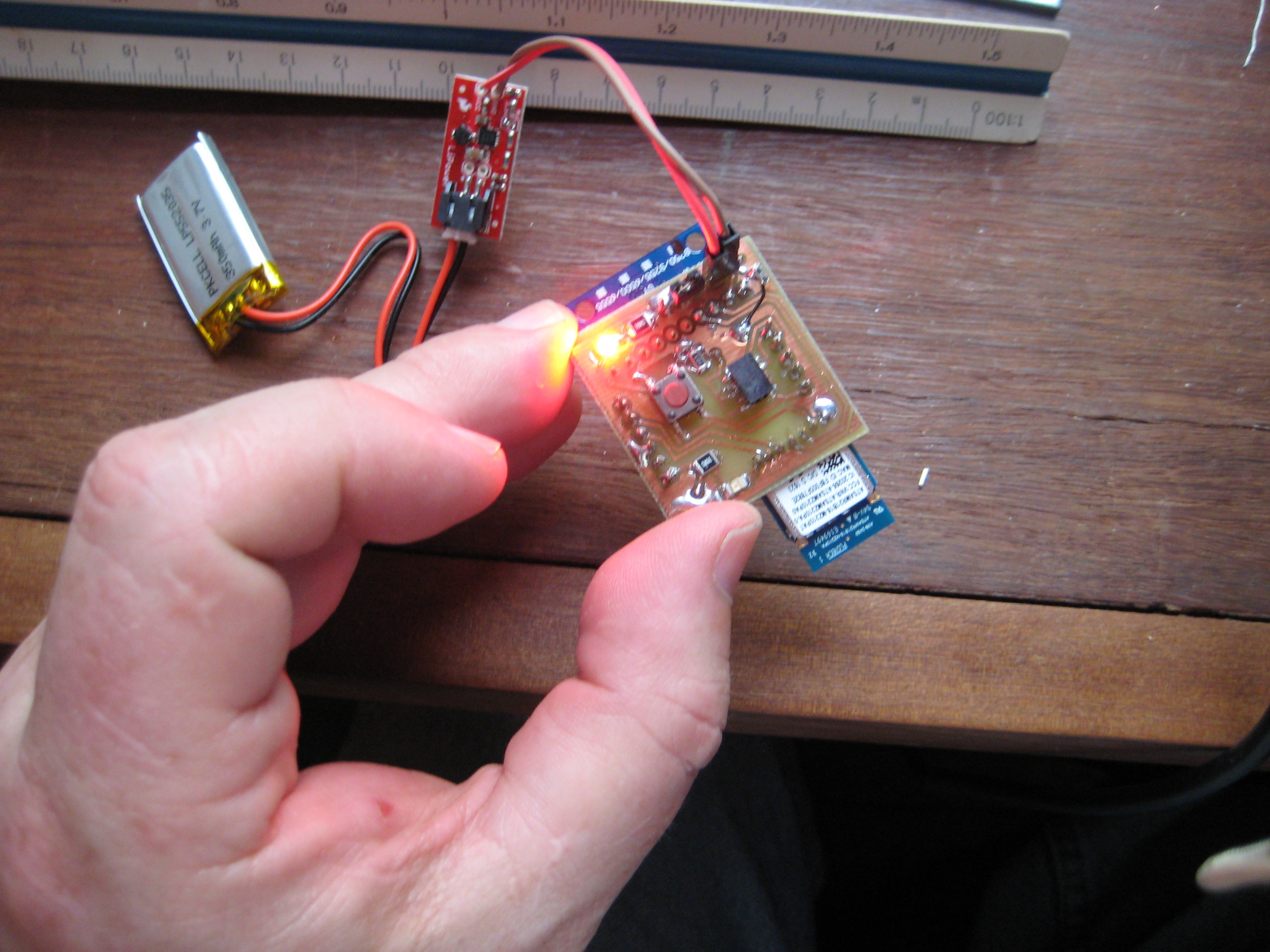
2. I have made a new node design, using a LiPo battery. My target is ultimately to make the node about the size of an Australian 50c piece. It is getting there. My fabrication skills are slowly getting better.
The new node uses a 350mAh LiPo and a Sparkfun Boost converter (both sourced in Oz from LittleBird Electronics - https://littlebirdelectronics.com.au/ - happy to give them a plug - good to have a local company that stocks Sparkfun bits:)).
![]()
![]()
3. I am looking at ways of mounting the nodes (+battery etc). I have bought some wetsuit neoprene material and am going to experiment with this to see what I can make up.
Once I can get a workable attachment method I can start trying it out in situations closer to its end use environment.
-
Practical Use (older version)
09/23/2016 at 06:24 • 0 commentsI thought I would add some older examples of how the system is used.
The short video is showing the older 'wired' version of the system being used to monitor accuracy and smoothness of a simple task - the request was 'lift an empty glass to your mouth as if you were going to drink from it'
the system recorded the movements using IMU sensors attached to the upper arm, forearm and back of the hand. It then generated a number of graphs of the motion.
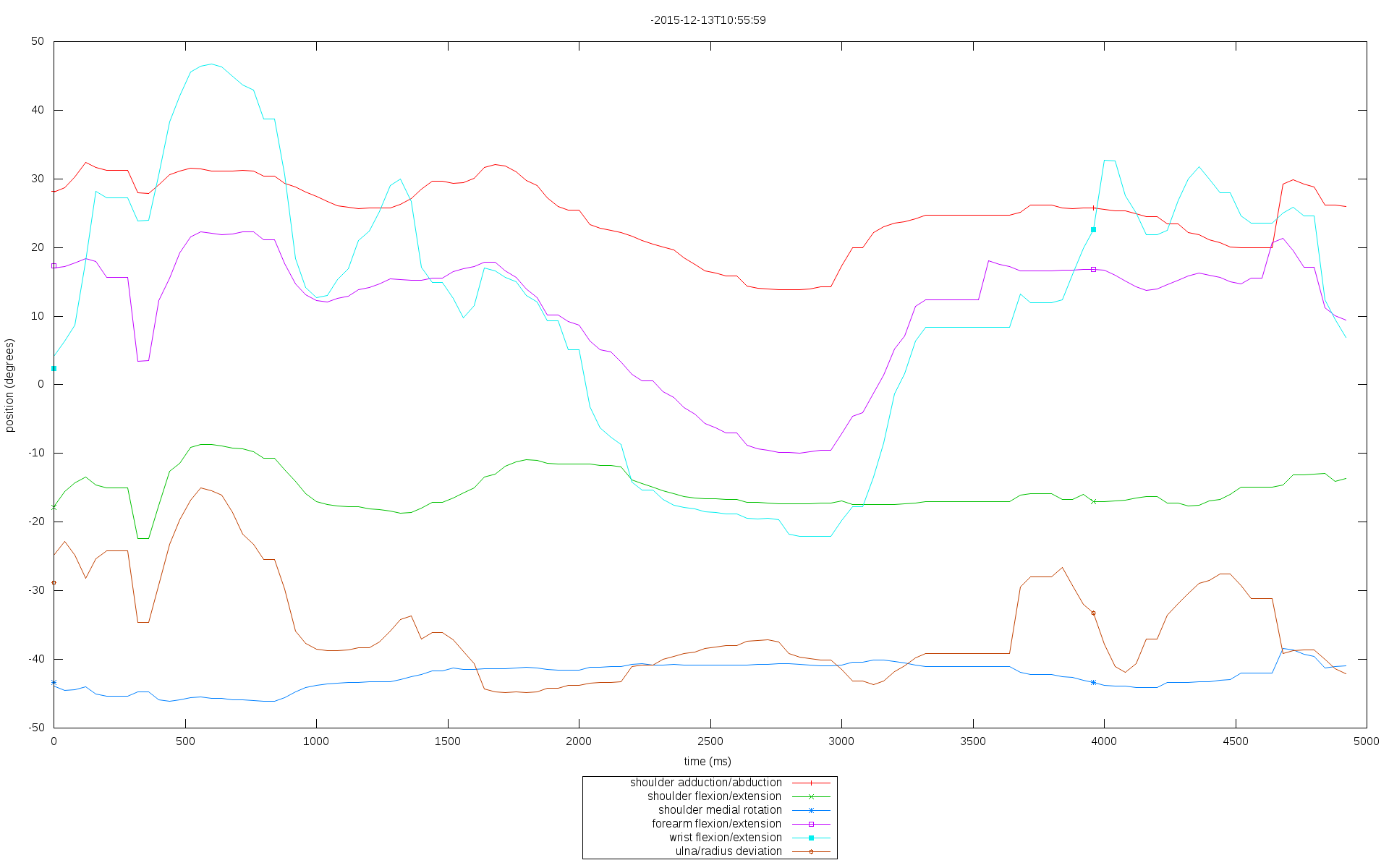
2 of the graphs of the above motion:
rotational position of a number of movement axes over time. Notice how the 'wobble' of his hand as he puts the glass back down in the video is reflected in the graph - particularly the wrist flexion/extension and ulna/radius deviation.
![]()
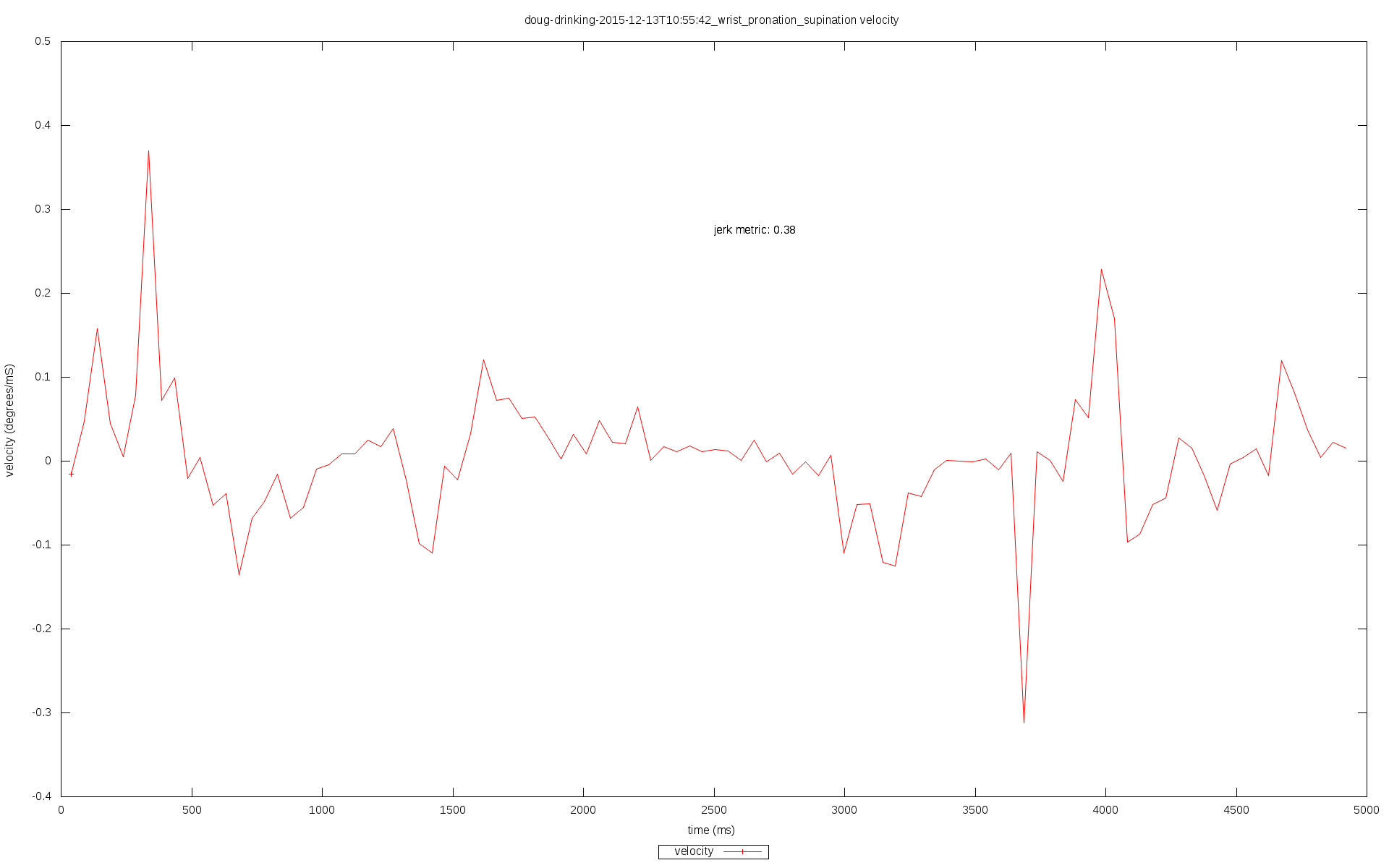
angular velocity of wrist pronation/supination
![]()
This excerpt was from a trial done last year looking at the effect of the drug Baclofen on his dystonic movements.
The above session was done using the first incarnation of the system using IMU sensors all physically connected by wires to a Raspberry Pi that was worn on the body that queried each of the sensors for their raw data, crunched that raw data from each of the sensors into a suitable form and passed the calculated orientations to the User Interface.
In the new 'Biot' system currently being worked on, each sensor operates standalone and does the processing of its orientation itself and sends that calculated data wirelessly to wherever it needs to be displayed and recorded.
It should hopefully be lighter, a lot easier to connect and configure and should scale better for operation with many sensors.
-
System Specifications
09/23/2016 at 05:20 • 0 commentsI have finished writing the specifications for a newer and cleaner set of system APIs and messaging protocols.
The current system interactions were tacked together on the fly as I was trying to work out how to make the system work and as a result are clumsy, difficult to develop further, hard to debug and generally inefficient.
The new protocols have taken into account some of the things I learnt from getting the current system working and are better organised and thought through.
I will need to refactor the system software to use the new protocols. This should clean up a lot of clutter and duplication though and generally make the system easier to develop.
The specification document is at https://cdn.hackaday.io/files/10766460612544/Biot%20System%20Description%20release-v-1.0.pdf
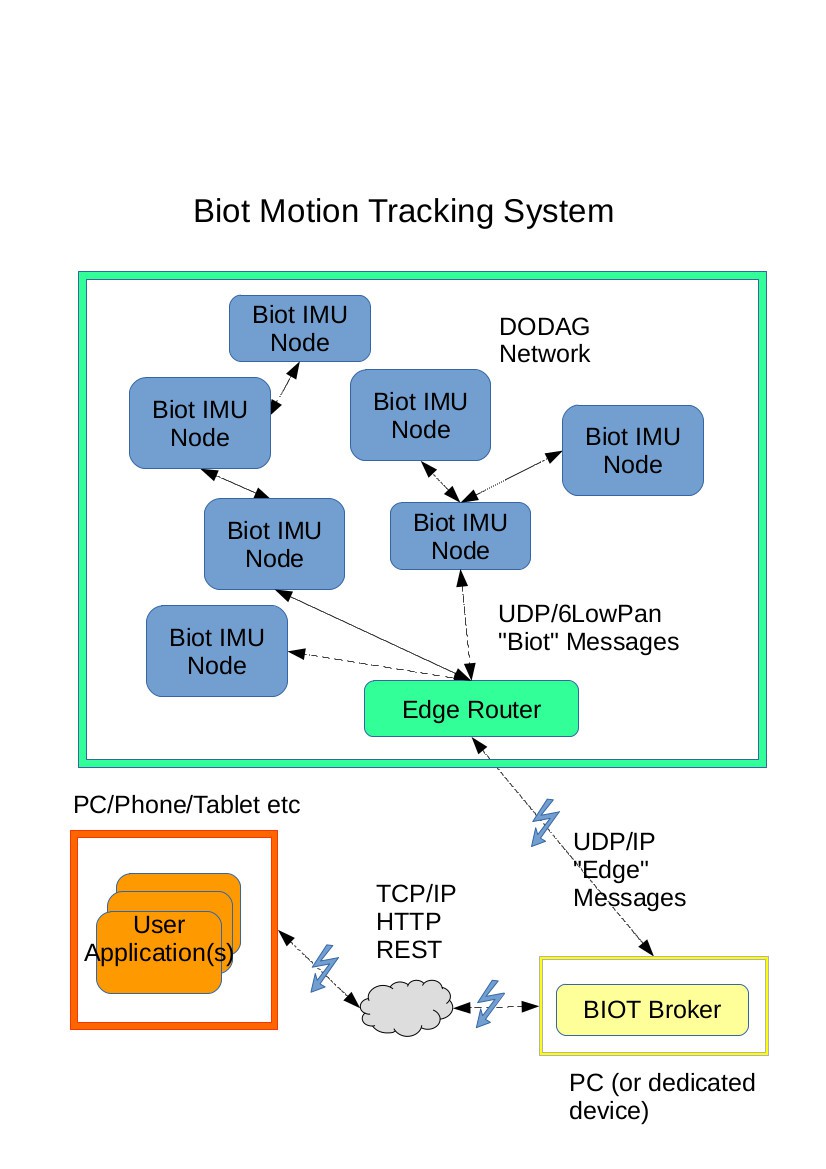
The document describes the model drawn below and specifies in detail the message protocol and REST API.
Next steps:
1. refactor the software to use the new protocols and API
2. make the Biot nodes smaller and change them to use LiPo batteries
3. work out a good way to mount the Biot nodes on the body
4. refine the user interface (to at least have equivalent functionality to the early version of the system)
5. start using and testing on live subjects
![]()
-
Proof of concept seems proved
09/19/2016 at 07:25 • 0 commentsI have built several of the nodes, progressively making them smaller (as I get better at making and assembling the PCBs). At this point (based on how they behave) I think this architecture (using the SAMR21s and MPU9250 IMU devices connected via a 6lowPAN network) will work and is worth pursuing.
Power consumption seems reasonably low - unfortunately a little bit too much for a 3v button battery though. :(
Here are 2 of the most recent nodes showing their size. It is a bit hard to see but the UI is displaying both nodes moving in unison as I twist my hand about.
and here is a quick attempt to hook them up to my arm using some velco straps just because I am impatient and wanted to see them doing something that will be closer to their end purpose.
Basically they seem to work but now I need to look at making something more practical and closer to a usable product.
Next issues to address:
1. size and shape. The current nodes are still physically larger than I want and are awkwardly shaped making them hard to attach to the body. They also are a bit heavier than I think is appropriate. A lot of this is because of the AAA battery each node carries and the MPU9250 breakout board size.
I am looking at moving to a flat LiPo battery that should result in a thinner, sleeker and smaller design.
I also want to move away from the MPU9250 breakout board to mounting a MPU9250 directly on my carrier board as this will also save space. Unfortunately due to the pin spacing on the MPU9250 I will need to create a PC board with finer resolution than I currently can achieve (my 600 DPI laser printer cannot print the pads on my transparency without them running into each other :( ). This bit not yet urgent as I think changing away from the AAA battery and making a suitable mounting system is higher priority to get working first.
2. Mounting the nodes on the body. I need to have a simple and easily attached way of attaching the nodes to various parts of the body.
3. User interface. Currently my user interface is aimed at testing the nodes functionality, rather than being something that would be capable of being used to actually record and analyse body movements. This will need some thought and specification (although the UI I made for the earlier implementation of the project had much of the functionality I think I need to implement in the new system so can be used as a model for what I need).
4. Edge router. Currently this involves booting up a SAMR21-ZLLK development board, hooked up to a FDTI/USB cable and running a SLIP network interface to give me connectivity between the node network and the 'real world' network. Ideally I would like something like a USB dongle that plugs into a PC and starts up or a small standalone wireless device that just needs to be turned on.
5. Live testing of tracking, recording and analysing actual limb movements.
Other Issues
I need to look at is static discharge protection. Because the nodes are worn on the body and the person may be wearing clothes that may generate high static charges I am concerned the nodes may be vulnerable to damage from ESD. (I think I killed 2 of the atsamr21b18-mz210pa modules last week while I was wearing a synthetic jumper that I know builds up a bit of charge. I got a small spark between my hand and desk lamp not long after 2 of the nodes stopped working - a cold dry windy day as well so I believe it was ESD that killed them). Designing to protect from ESD is not something I have any experience with so I will need to research it.
Tidying up the software. Currently the software development has been directed by experimentation rather than specification. I want to spec out the various APIs, communication protocols and software functionality. This should make it more robust, scalable and maintainable. It will involve specifying node to node messaging, node to edge router communication, the web service API and the UI functionality. Up until now I have just added bits as I needed them but there is a great lack of consistency and also I think I can streamline and reduce the actual size of data being shuffled around the system that should speed things up.
-
Slightly tidier biot node
09/02/2016 at 04:48 • 0 commentsI have tidied up the board for my second biot node, mounting the battery and up-convertor onto the PCB.
Annoyingly I have run out of ATSAMR21B18-MZ210PA modules so can't build any more at the moment :(. They have been on back-order from my supplier for a few weeks. Not sure how long I will need to wait.
I could start looking at rolling my own board using a standalone SAMR21 chip rather than the prebuilt module but that involves a jump up in my fabrication and design skills and also means the issue of radio compliance/certification might need to be considered.
-
Proof of concept wireless IMU node
09/01/2016 at 04:41 • 0 commentsSo far I have been using ATMEL evaluation boards (the SAMR21-XPRO and ATSAMR21-ZLLK boards) to develop the IMU sensor nodes but I will need to move towards a small purpose built, battery powered module incorporating an IMU sensor and microcontroller.
I am still building up my design and fabrication skills and so decided my next step would be to move to an intermediate 'proof of concept' sensor node using easily assembled bits.
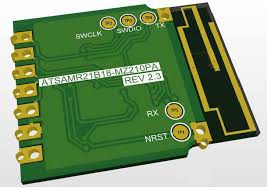
I took an "off the shelf" MPU9250 IMU breakout board (the MPU9250 appears to be superseding the MPU9150 that I have being using as sensors up until now), an ATMEL ATSAMR21B-MZ210PA microcontroller/wireless module, a Sparkfun 3.3v voltage upconvertor breakout board and made a small PCB that holds the IMU and microprocessor along with some leds to indicate power to the node and a 'heartbeat' from the microprocessor.
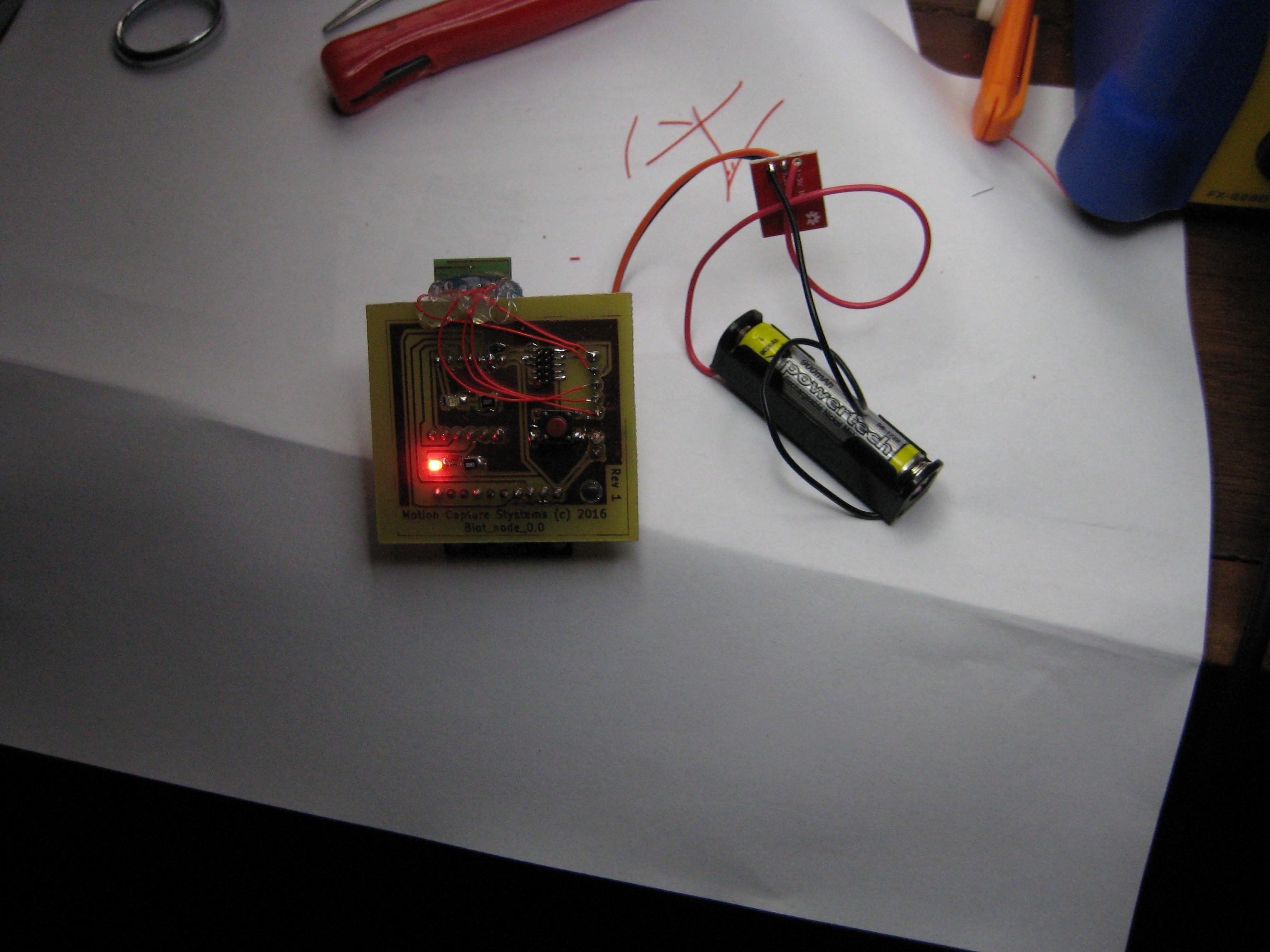
The node runs off an AAA cell and seems to work fine (after a few "learning experiences" making dodgy PCBs) . It is not my final design but will allow me to do some more experimentation and planning of the next steps.
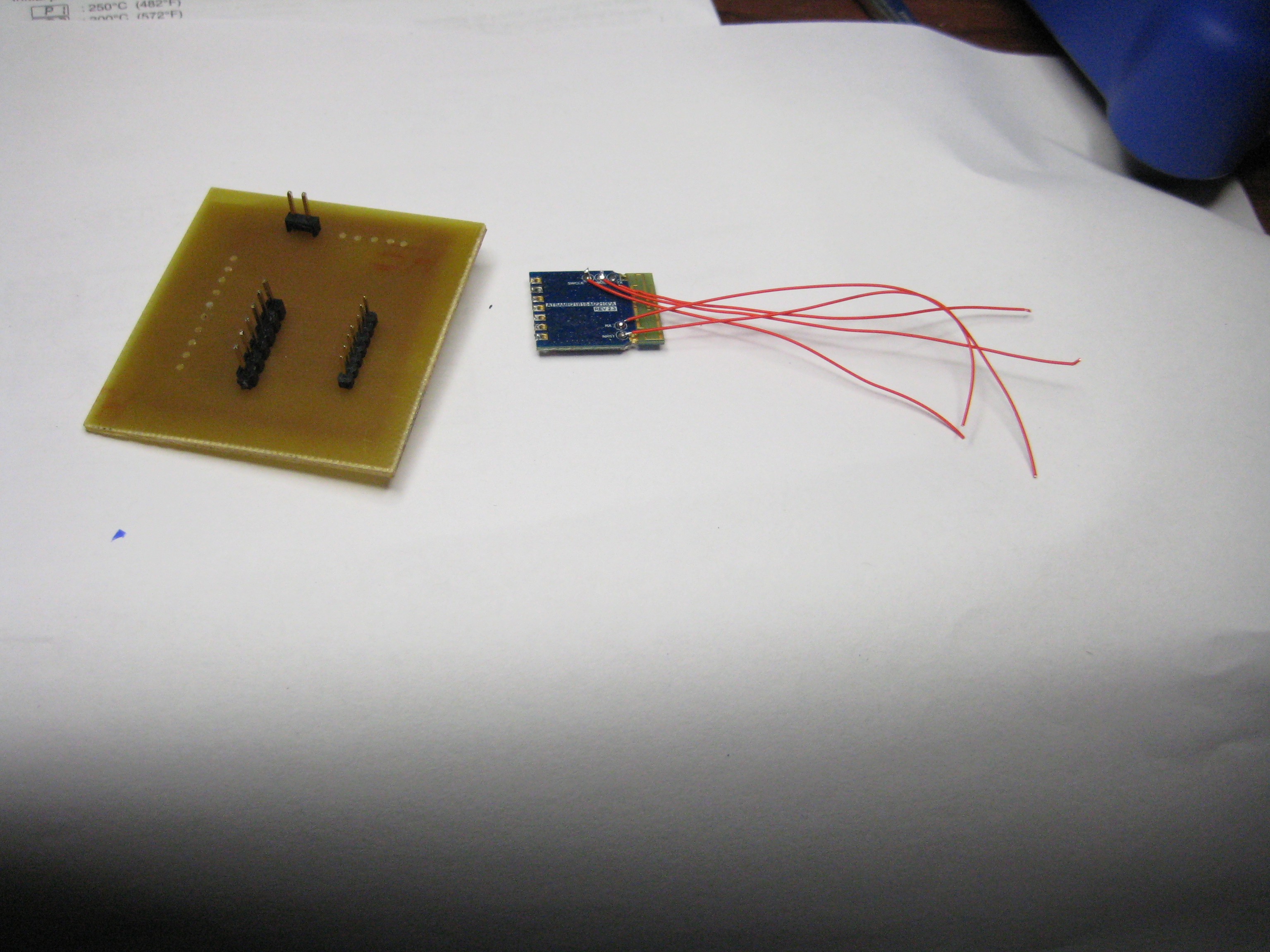
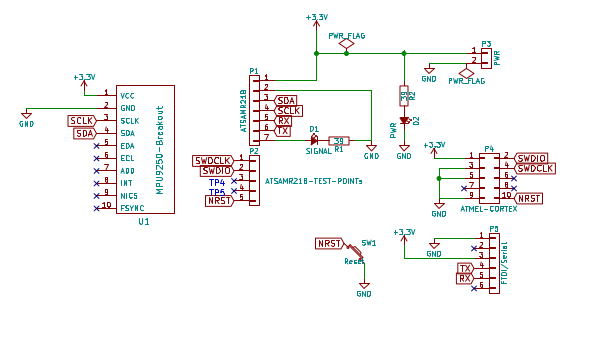
The ATSAMR21B-MZ210PA has minimal pins available and to program it.
![]()
![]()
I need access to the RESET, SWDIO and SWCLK test points that are not exposed on the main module output pads but are available as test points on the underside of the board. I soldered some wire wrap wire to the test points so I could get access to them. This allows me to program the microcontroller using the Atmel 'Cortex' 10 pin header and Atmel-ICE programmer.
![]()
It appears to work!
The PCB is schematic is simple - it is mainly a carrier for the IMU and microcontroller modules:
![]()
The code that runs on the microcontroller and the PC communication and browser display applications are available at GitHub "Biotz" code.
You will need an edge router - I am using an ATSAMR21-ZLLK evaluation board and the code that runs on that is in the above repository (along with README info on how to set it up).
The code on the microcontroller runs under the RIOT-OS operating system. I have forked a copy of RIOT so I can add the boards I am using and functionality I need. It is not at the same coding standard as the 'real' RIOT-OS code - it is hacked enough to get it to work for the prototypes. My forked version is at hacked version of RIOT-OS.
Don't expect production ready code! It is really scrappy, feel free to use it but don't expect it to be robust! Also it is under currently active development so I may break things at times :(
My next steps:
1. make a few more of the 'proof of concept' nodes to see how well they interact with each other
2. start refining the node design into something closer to what I am envisioning - something quite small, lightweight and physically robust, that can easily be attached to the body.
-
Changing architecture
08/13/2016 at 01:10 • 0 commentsHaving wires to each sensor introduces problems with the wires getting tangled and in the way when moving, connector integrity, issues with transmission of the I2C signals for sensors attached a long way from the controller, the need to wear a controller on the body and difficulty attaching the sensors.
I want to move this to a wirelss solution.
I have been experimenting with using ATMEL atsamr21 type devices. These devices combine an ARM processor with a low power 2.4GHz wireless module and are being pushed for use in "IOT" type applications.
They have low power consumption, are cheap and small.
The small size of the units means I think I can create a small node with an IMU (Inertial Measurement Unit) , processor and wireless, that would remove the need for the controller device (the current body worn Raspberry PI) and move a lot of the maths processing of the IMU data to the sensor node itself.
This will simplify things a lot.
Currently I have a hacked up system working that uses the MPU9150 IMU sensors, hooked up to various atsamr21 boards (atsamr21-xpro and atsamr21b-mz210pa) to get the code working and see if it is feasible.
I am using the RIOT OS operating system https://riot-os.org/ to manage the nodes, it also allows me to access a shell like interface to each node while I am working. I have forked a version of RIOT to allow me to add support for the XPRO and 21b-mz210pa boards plus add some bits I need to make it work.
The processor on each board is calculating quaternions representing the physical orientation of the IMU chip it is connected to and sending that using a 6lowPAN network to a edge router (currently an ATSAMR21ZLL-EK evaluation board) that connects to a PC running a web service allowing browser applications to track the sensors.
The next step is to move to making a small node that houses the processor, IMU and power source that can easily be attached to the body.
I will update the parts list and links to code for my forked RIOT and the nodes themselves on GitHub soon.
-
Current state of play
04/08/2016 at 01:15 • 0 commentsThis is a bit of a ramble... sorry
Some background
My youngest child has a form of athetoid cerebral palsy that causes uncontrolled movement.
I am interested in ways I can use technology to help overcome some of the problems that condition causes.
I started this as a part time project over 18 months ago.
The original idea was to look at providing alternative ways of sensing exactly what your limbs are doing (particularly if they are not moving how you are intending to move them!) to help gain better control of your body.
One of the initial inspirations was how sometimes an unintentionally flexed muscle would relax if you stroked lightly the associated 'opposite' (or 'antagonist') muscle (eg if the bicep flexed, stroking the tricep at the back of the arm would seem to often help release the bicep) .
What I was initially interested in looking at:
1. ways of sensing when a muscle was unintentionally flexed and perhaps applying automatically some form of tactile feedback to the antagonist muscle (eg a vibration).
2. ways to provide additional proprioceptive feedback about limb movement (eg visual, tactile, auditory etc) in addition to the feedback our body gives normally.
3. ways to measure long term changes in the way the condition manifests itself, particularly when evaluating various therapies.
The first step in exploring these ideas, was to develop a system to accurately and unobtrusively measure limb motion.
So I started doing that.
That is this project.
It has been going about 2 years.
Where the project is now:
1. I have a working prototype. It is a bit rough and clunky but proves the system works.
2. it was used whilst trialing a drug treatment that can sometimes help people with dystonic movement disorders. (This was done in addition to the standard evaluation technique that involves experts taking before and after videos of various tasks that typically are used to diagnose dystonia). Unfortunately the drug trial was stopped part way through as it appeared subjectively to those involved to be causing more clumsiness and difficulty controlling movement rather than improving it.
The system did appear to also indicate more objectively a worsening of control that confirmed to me it was a potentially useful tool.
Where I am (personally) at now
After talking about what I was doing with friends and acquaintances over the last 2 years I started to wonder if something like this could be turned into a commercial product and what would be involved. I foolishly started to think of perhaps making a company that produced motion capturing systems.
Meanwhile, I hadn't done a lot of looking at what was out in the real world for some time - I was too engrossed in the nuts and bolts of getting it working.
I recently discovered that since I started playing with the technology, many people have been doing similar things (including several projects on this site) and I also saw that other's have recently come to market with commercial devices using IMUs for sensing of limb postion.
Which I should have realised was to be expected - IMUs and tracking your body are a pretty obvious match!
But to me this came as shock (silly me!) and was discouraging but then I thought - why am I doing this? To make a commercial product? or to explore how I can assist people with movement disorders?
It is the second - I had lost sight of the motivation - I am not trying to make a business. I want to see if I can make something that can assist the day to day life of people (like my son).
So where I am heading with it:
I now want to start looking at the other initial spurs that started me on the project: ie
1. sensing if a muscle is unintentionally flexed
2. providing feedback to the person (eg automatic tactile feedback to antagonist muscle pairs and alternative proprioceptive feedback to build better unconcious understanding of where your limbs actually are.
and integrate those ideas with the existing tracking system. I also need to refine the system to make it less physically clunky and more robust.
Human Limb Tracking
A system that tracks limb movement of people who have movement disorders to assist in diagnosis and therapy