Ranarchy
Ranarchy-
Connectivity
07/01/2014 at 18:44 • 0 commentsFor building large, complex megastructures: Central computer (a pc) will monitor positions of any and all BuckyBots building a structure. Structure resides in PC as 3-D CAD model. Central PC sends orientation commands as data frames to all BuckyBots. Each orientation is tagged with BuckyBot identity, so each Bot can identify its own data.
GPS is used for gross position (that's why the orientation board has a GPS module). Considering using active/optical means for fine positioning. Positioning doesn't have to be precise ... would be happy with 1 meter resolution for most structures.
-
updated ranarchy.org pages ...
07/01/2014 at 18:24 • 0 comments... so that the servo board schematic is available.
-
Getter material?
06/27/2014 at 16:29 • 0 commentsAnybody know where I can get some vacuum getter material for my extruder?
-
Size Matters ...
06/27/2014 at 14:06 • 3 comments... when speaking of extruder power. I'm taking a reallly close look at extruder design -- probably the single most power-hungry item on a plastic-filament 3D printer. I think we can miniaturize the design quite a lot ... using a Kapton heater in the 5-10 Watt range. Maybe using a high-frequency buck/boost converter to bump up the 7.2 VDC to 28 VDC or higher.
The current extruder designs are really clever, but clearly not based on minimum power use.
Any thoughts from anybody?
-
...more power, captain
06/26/2014 at 22:03 • 0 commentsThe single longest pole in the BuckyBot tent is supplying the wee beastie with power. Tethering sucks. Optical power transmission is wastefull. We are open to resonate power transmission a la Tesla ... I'm also making a micro-miniature extruder that should be much more energy-efficient than what is current (excuse the pun -- but, then puns are inexcusable, aren't they?).
-
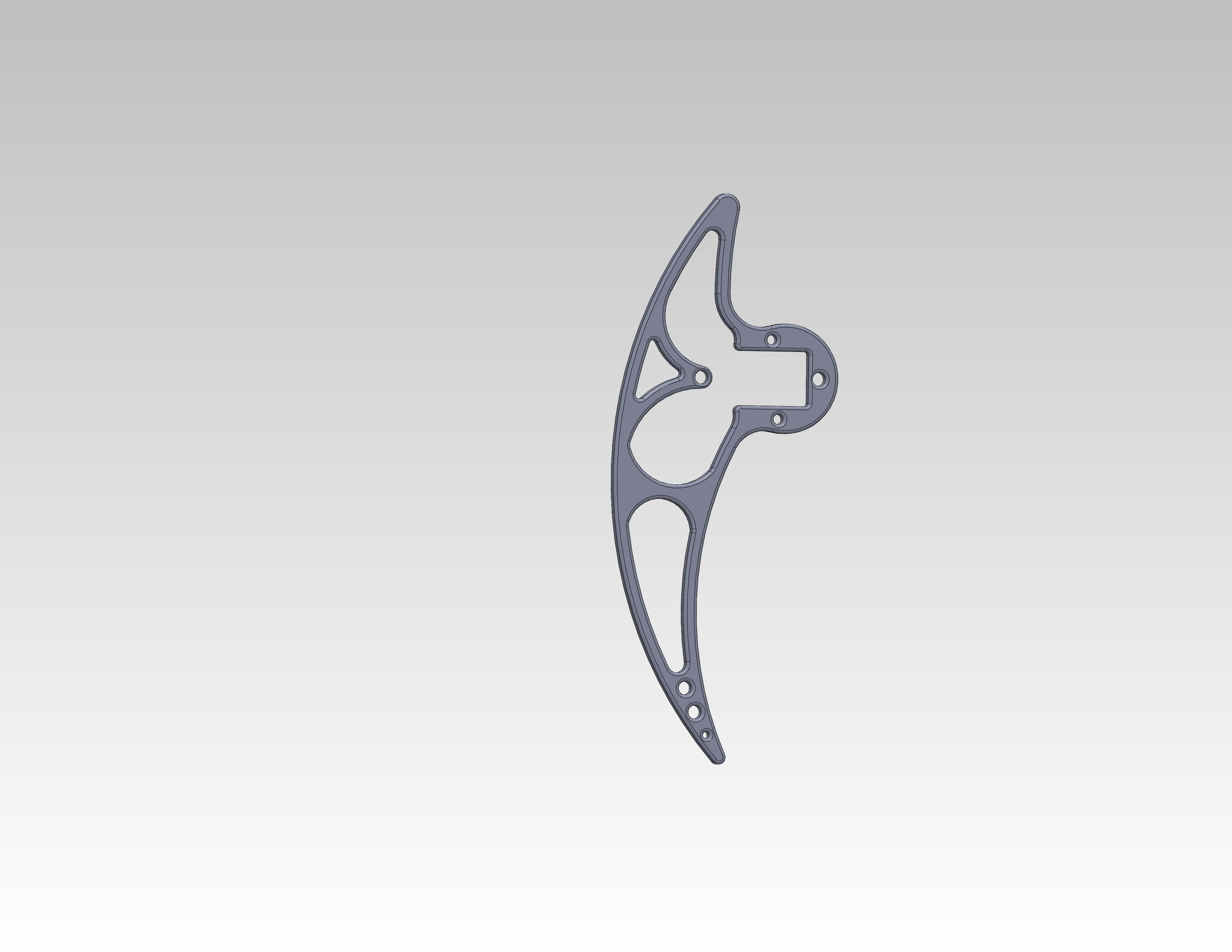
Stiffened the foot of the Hexabot
06/25/2014 at 19:11 • 0 commentsWhen I cut out the foot of Vlad's Hexablot (out of 3/32 plywood), I noticed it was really weak in one place. Threfore, I stiffened the design a bit for BuckBot. Will make model available in the archive if anyone wants it. Here is the stiffy:
![]()
-
... and another thing about that servo board
06/25/2014 at 18:39 • 0 commentsIt monitors the current through each servo ...
-
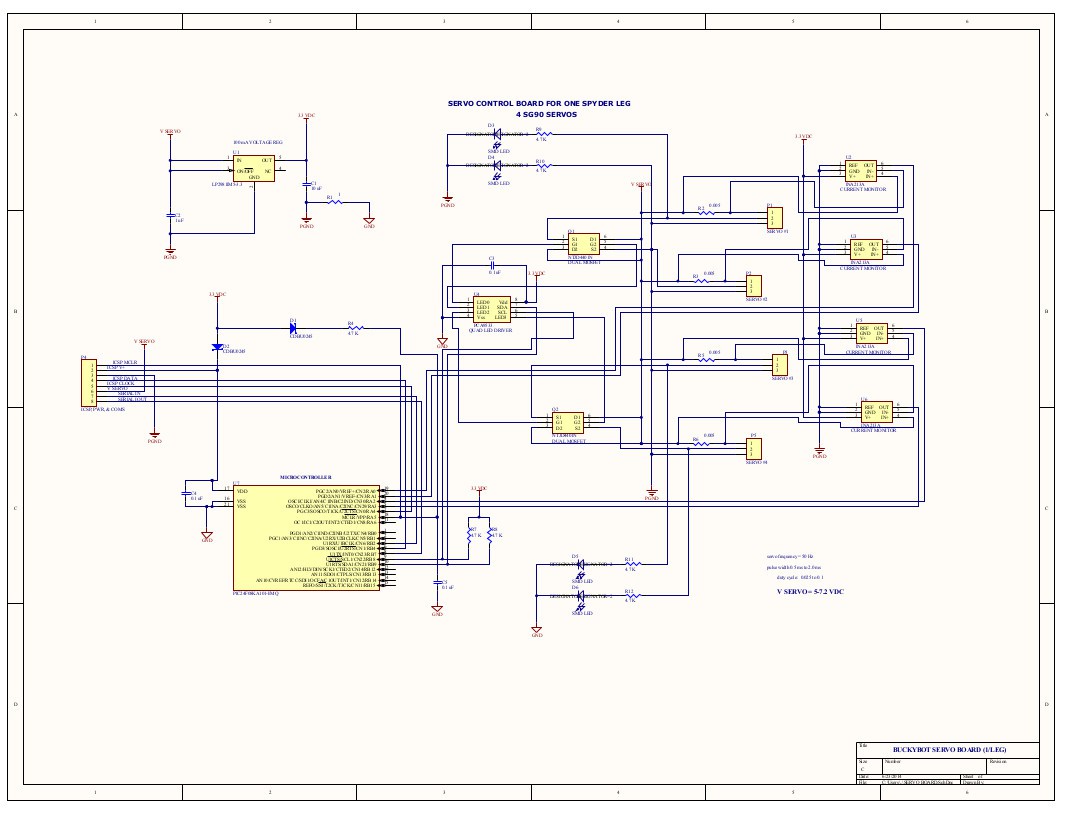
Servo Driver using LED drive chip
06/25/2014 at 18:34 • 0 commentsJust completed a PCB design for driving one leg of the BuckBot uses a PCA9533 LED Driver to provide four PWM signals to (up to) four servos on each articulated leg.
![]()
Boards on the way from OSHPark. The LED Driver talks to a PIC microcontoller over the I2C bus. Servo positions are, therefore updated digitally. A single sequence of 8-bit words moves the whole leg through its paces. Link to view the pdf is: http://www.ranarchy.org/SERVO_BOARD.html
-
Don't need 6DOF
06/25/2014 at 17:09 • 1 comment -
SERVO BOARD DESIGN COMPLETED
06/17/2014 at 19:31 • 1 commentThe design for a 4-servo driver board is complete. One of these boards will drive each leg of the BuckyBot (it has 6 legs). Servos will be GS90's. Three servos for leg joints (up to 3) and one servo for leg abduction/adduction. Using a quad LED driver (LED drivers have multiple PWM outputs) to control the rotation of servos. Board is tiny. Will be posting design information at www.ranarchy.org this weekend. Stay Tuned.