 David Brown
David BrownShared under the Creative Commons - Attribution - ShareAlike 3.0 license.
From the datasheet;
The DRV8880 is a bipolar stepper motor driver for industrial applications. The device has two N-channel power MOSFET H-bridge drivers and a microstepping indexer. The DRV8880 is capable of driving 2.0 A full- scale current or 1.4-A rms current (with proper PCB ground plane for thermal dissipation and at 24 V and TA = 25°C).
AutoTune™ automatically tunes stepper motors for optimal current regulation performance and compensates for motor variation and ageing effects. Additionally slow, fast, and mixed decay modes are available.
The STEP/DIR pins provide a simple control interface. The device can be configured in full-step up to 1/16- step modes. A low-power sleep mode is provided for very low quiescent current standby using a dedicated nSLEEP pin.
Internal protection functions are provided for under voltage, charge pump faults, overcurrent, short- circuits, and over temperature. Fault conditions are indicated by a nFAULT pin.
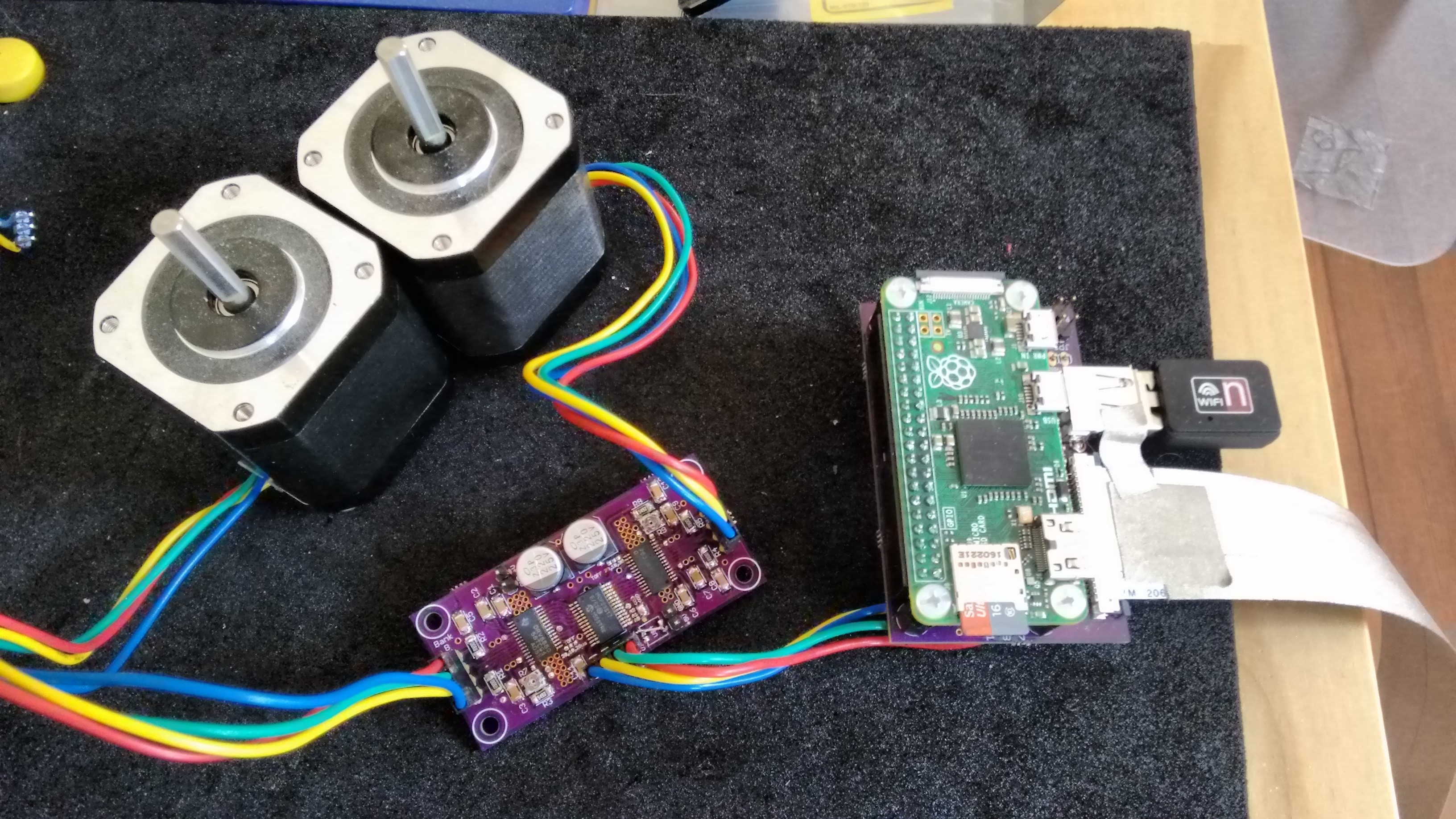
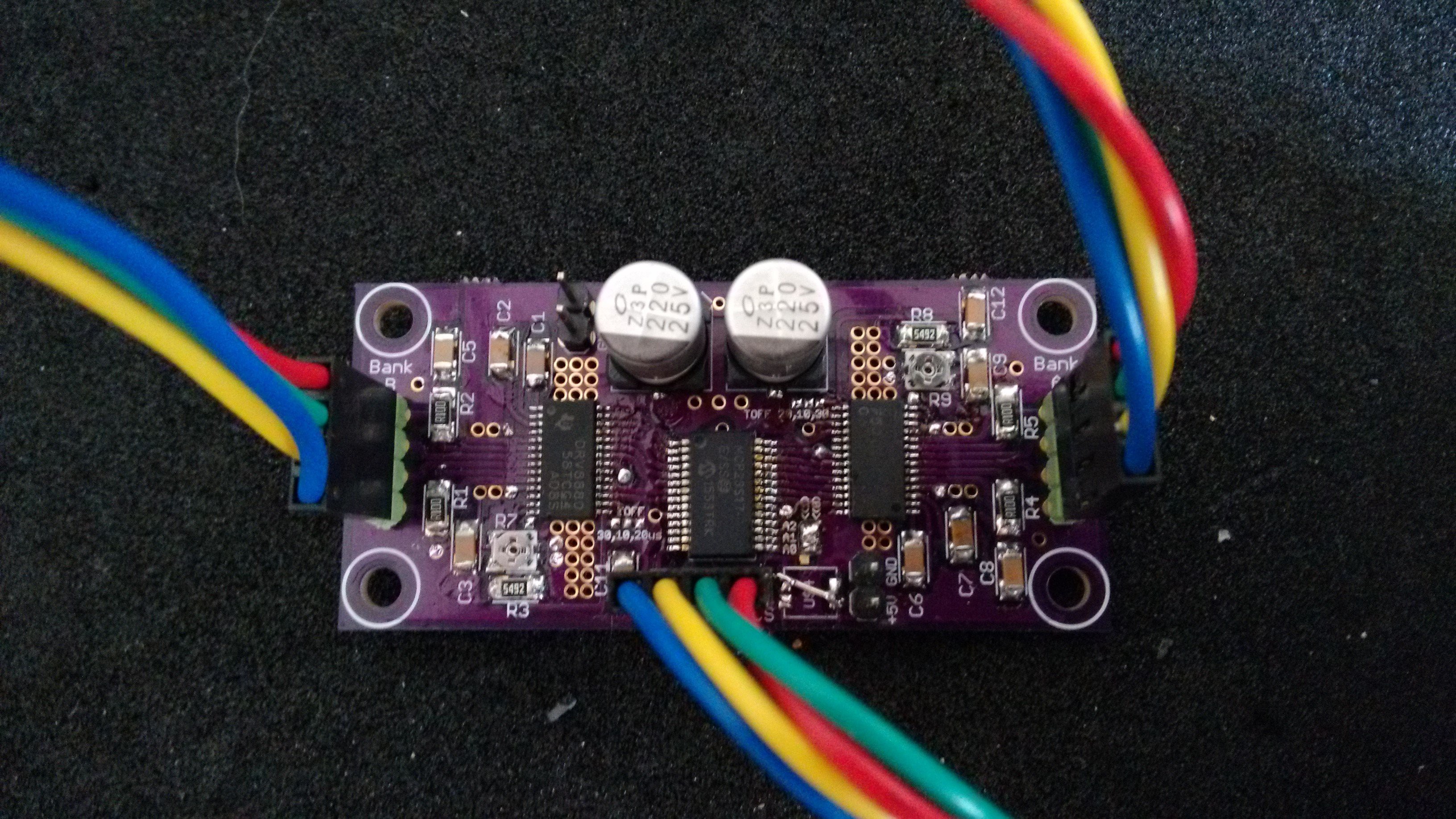
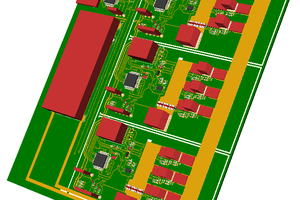
Update - rev A5 (to match the file iteration). The SPI expander connections have been re-arranged so that Step, Dir & Step Size are all on the same bank. This then allows the values to be updated in a single command allowing synchronous stepping. I've aslo broken out header pins for step and dir on both motors to allow direct control if required.
 Ketchup-Packet
Ketchup-Packet
 David Gonzalez
David Gonzalez
 Pontus Borg
Pontus Borg
 JP Gleyzes
JP Gleyzes