David Brown
David Brown-
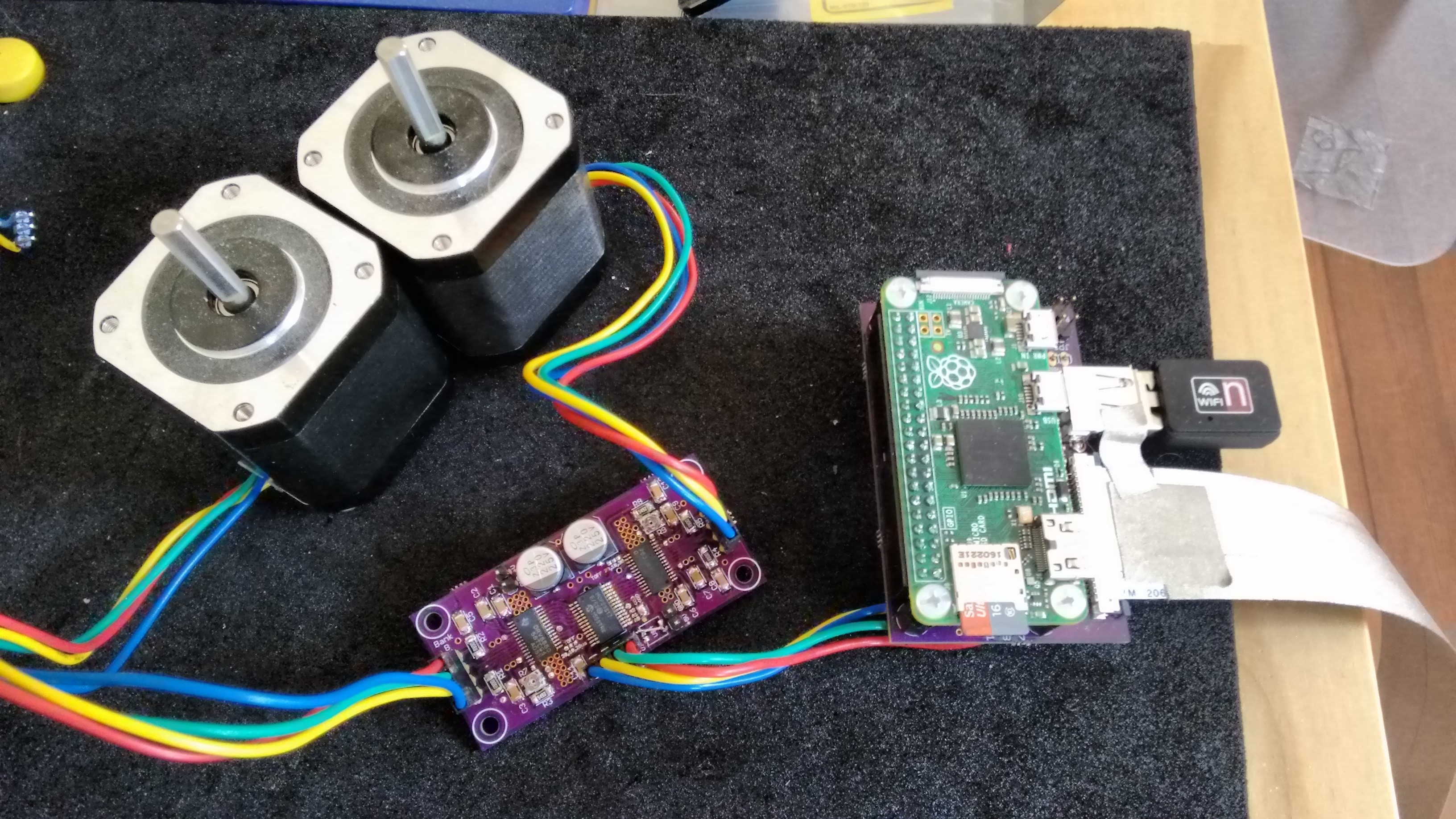
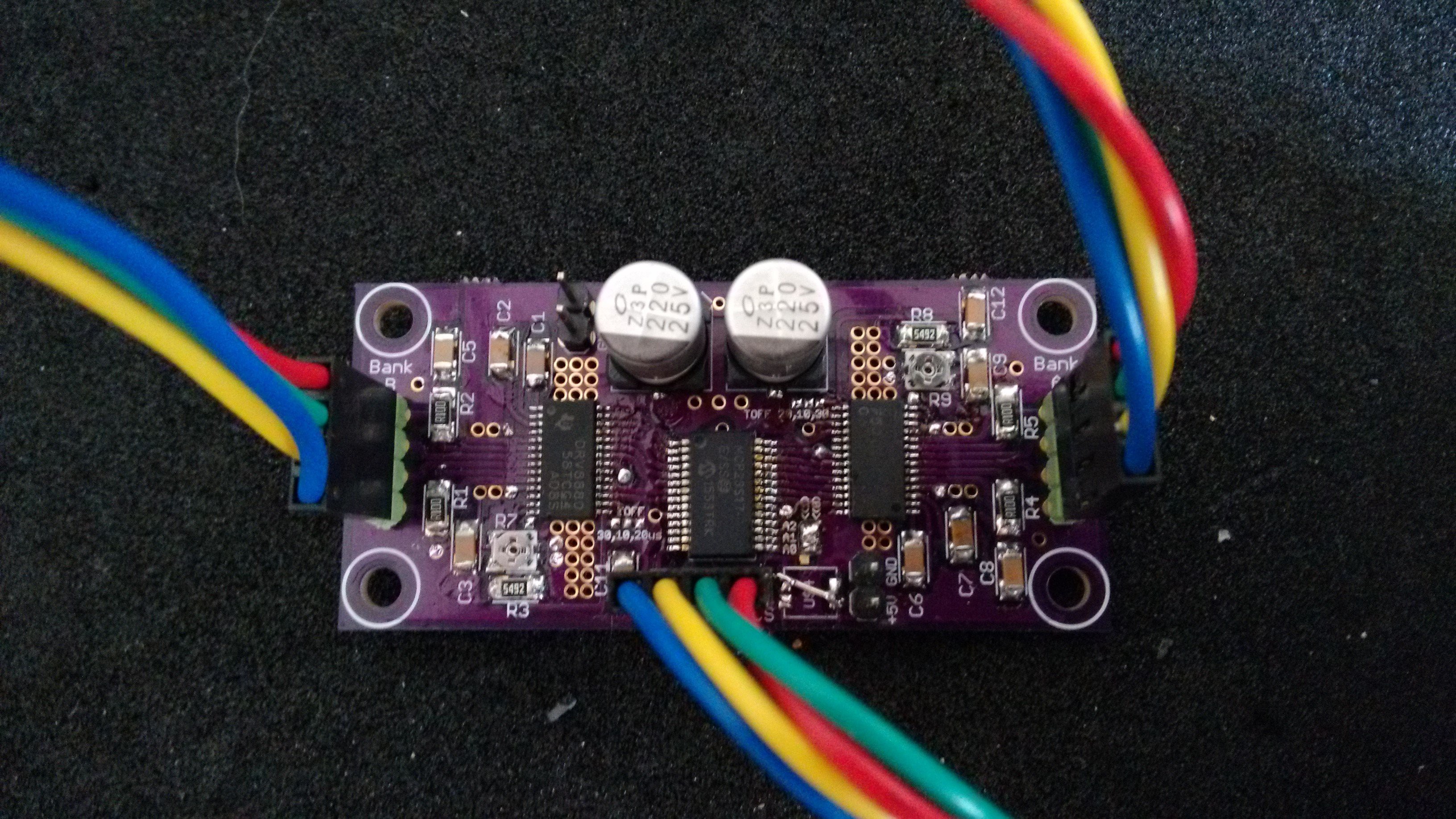
V2.0 board now running
06/26/2016 at 20:00 • 0 commentsNew version tested, transferred the driver chips over to the new board and all tests out well. I've also had a look at the IO expander and the I2C version can be used in place of the SPI one with no change to the board design, as I have added in address selector solder pads.
The SMD capacitors are much neater to the leaded version I had before. I have not run any testing of the current limiting, but the full range of step sizes are behaving themselves.
My plan is to squirt some heat sink compound through the holes under the drivers to provide better thermal coupling, without the hassle of soldering (try and avoid too much heat input).
![]()
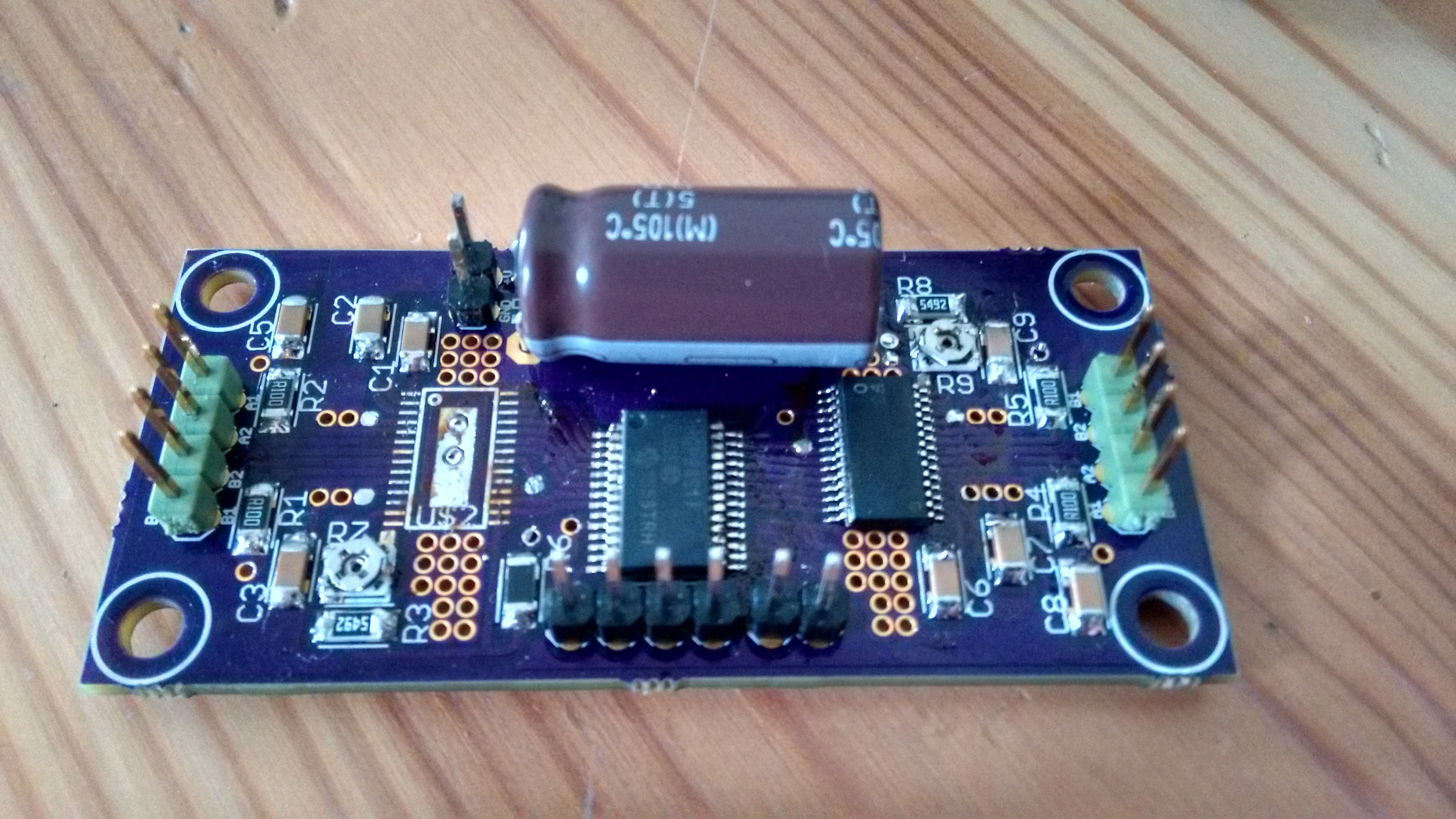
I had an issue with the PolyZen unit short circuiting, may be a soldering issue, but this item is not critical so just jumpered it. Looking at the PolyZen its a double layer board, so you need to be very careful soldering (hand) that you do not create a short between the layers on the edge. Should be fine for those using re-flow ovens.
I've posted A3 files have a trace link that needs cutting if you are going to use the PolyZen unit.
![]()
-
v1.0 board testing
05/03/2016 at 22:04 • 0 commentsWell the v1.0 board arrived from OSH and was duly populated. It took me a while to put together the SPI code for testing with the Arduino, but got there in the end.
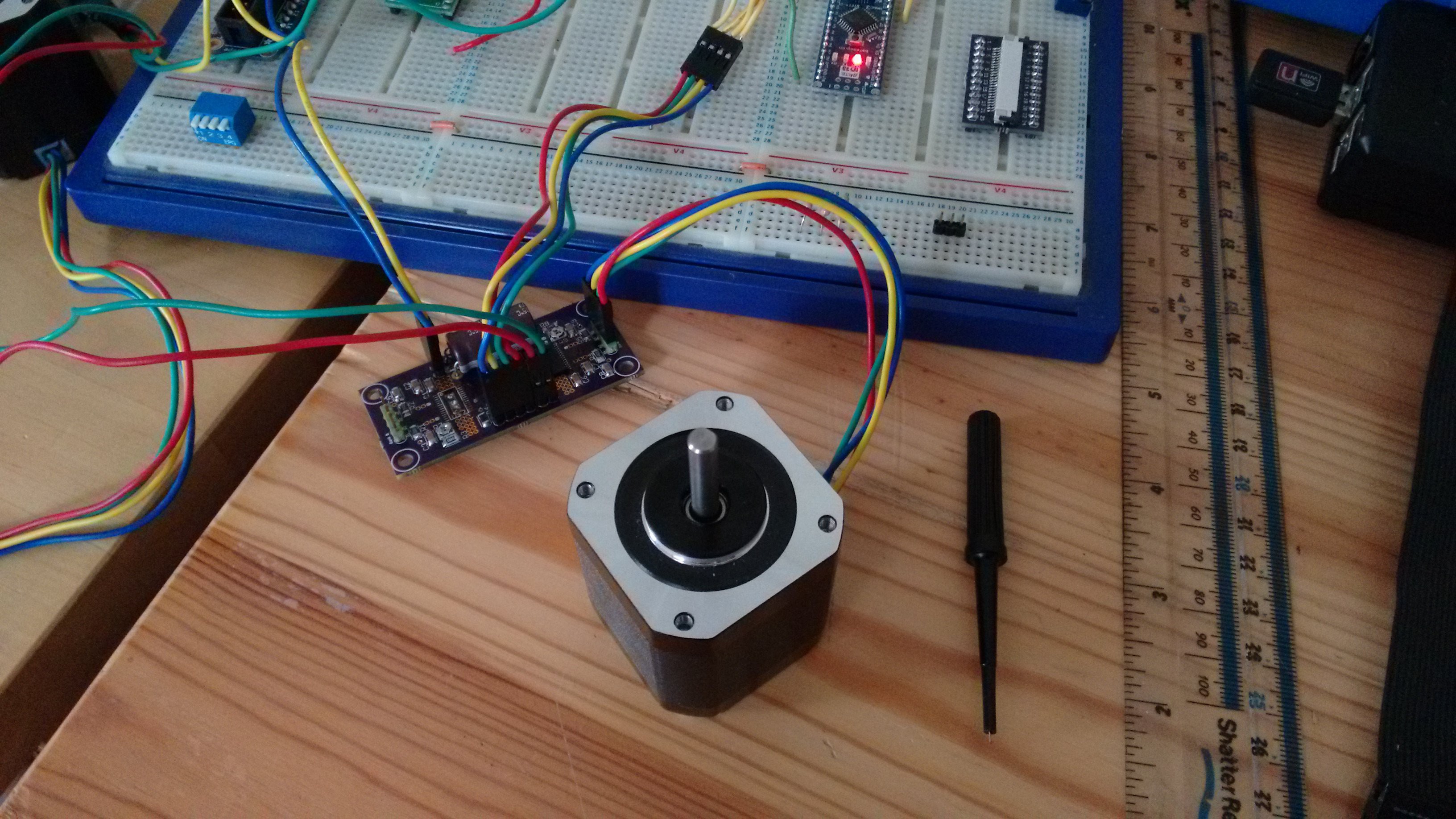
Whilst trouble shooting why nFAULT was being pulled low managed to short one of the drivers, so removed it. I noticed that some of the pins had not been making full contact so fluxed the remaining chip and re-soldered the joint. After this the motor ran successfully, with varying torque settings and full step range from full to 1/16th
The chip runs reasonably cool, hot to the touch, but not scorching. I am making some adjustments to the board to allow the address to be changed (x4 options) and to modify the fault, enable and sleep lines. The TOFF selector will be moved to a soldered setting on the board
Board files to be uploaded when further testing completed.
![]()
Fig. Populated board (x1 driver removed)
![]()
Fig. Connected to Arduino & stepper
Dual Stepper controller
This is a dual stepper controller (1.4A - 24v) using SPI/I2C interface with current limiting and 1/16th micro stepping