 will.stevens
will.stevensThis video shows the mechanism that I thought about using Lego a couple of days ago:
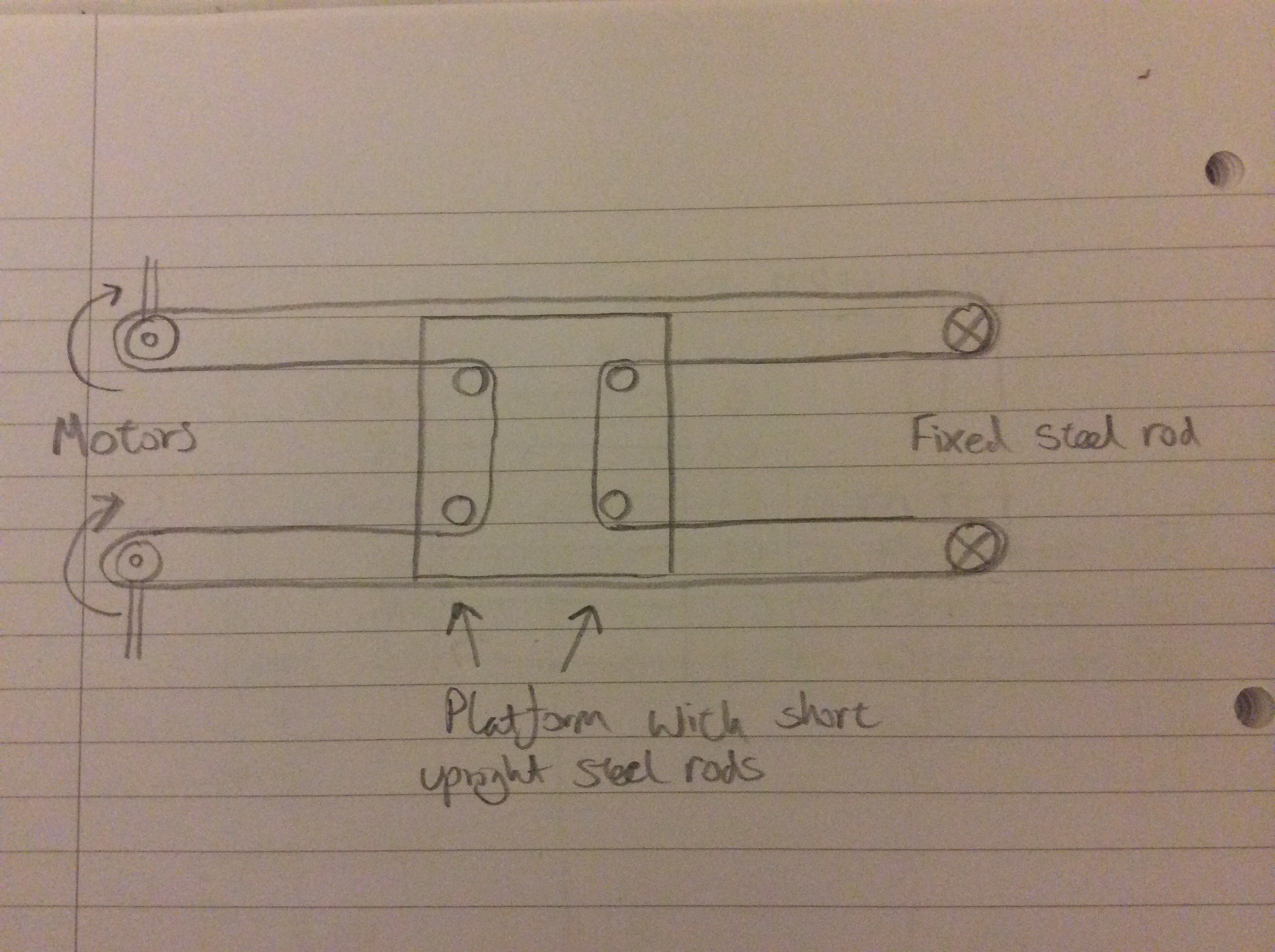
It seems to have several advantages over the platform mechanism that I posted in an earlier log entry. The main advantage is that both motors are at one end, which will make it possible to have two perpendicular axes without the motors getting in the way. It is also easier to tension the thread - this can be done simply by adjusting the position of the steel rod at the end of the rails.
Below is a diagram that helps to explain how it works.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Hi Will, you may already be planning something like this, but I drew up a way you could add a second axis to this system. Kind of like a corexy or hbot arrangement, except using four uni-directional motors instead of two bi-directional motors.
It doesn't look like drawings can be embedded in comments, so here is a link where the image is at:
http://imgur.com/a/ejnbR
Are you sure? yes | no
Thanks Matt, that's really helpful - I had hoped that something like that was possible, but hadn't figured out how to do it
Are you sure? yes | no