 serdef
serdef-
1Step 1
Take a small cleaning brush (different types may work).
Test if it slides well over the floor, if it keeps balance, you have a good brush.
If it tips over, you can cut the brush hairs into a more stable shape.
-
2Step 2
Solder a small DC motor to an AA battery holder, add a switch in between. Test the circuit on your desk.
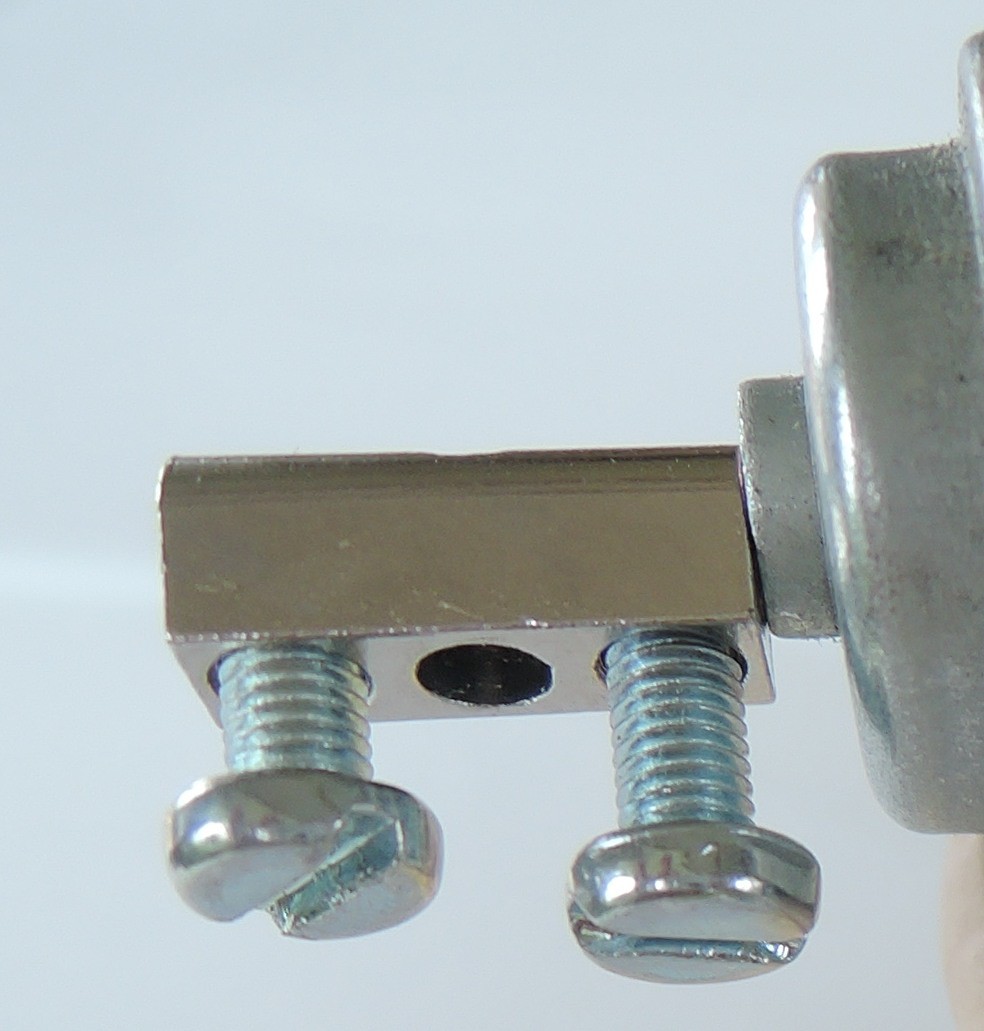
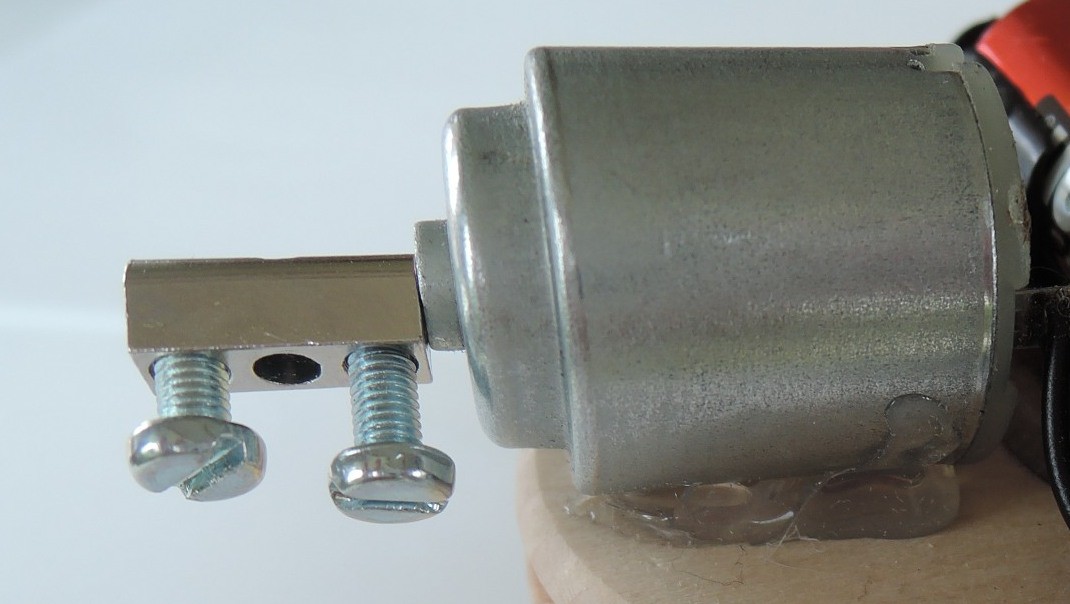
If it works, add some assymetric weight to the motor axis, such as these two bolts :
![]()
Test the vibration of the motor with the asymetric assembly. If it moves slowly on your table, you did well.
-
3Step 3
Now glue the motor to the brush, leave some space for the switch and the battery holder.
![]()
-
4Step 4
Glue the switch and the battery holder to the brush.
Testdrive your robot, check the balance and reposition the battery holder until the robots follows an 'intelligent' trajectory
![]()
-
5Step 5
Insert a rechargeable battery, and save the environment !
![]()
Your project is ready !
Cleaninator : Low Cost Autonomous Cleaning Robot
Extremely Low Cost Autonomous Cleaning Robot, using brush propulsion and rechargeable Ni-Mh battery


Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.