 witchdoc
witchdocThe idea
I've been thinking about building a robot for a very long time but since i didn't have any direct purpose i never got around to actually buiding it. I have been looking at vacuum robots lately and that sparked the idea to build my own, better, version.
I don't understand why most vacuum robots are round and low. Well, i understand the low part is so that it can get under your couch and stuff but it seriously decreases the available space for the sucking part of the robot. I would rather have a robot that is capable of cleaning all the visible dust in those corners than one that cleans the invisible dust under the couch. I'm perfectly capable of cleaning under the couches when i feel the need.
So. i want a vacuum cleaner that is able to get into corners and i don't really care about the places i can't see anyway. I also want it look better than a Roomba, which isn't really that hard, and i want it to be able to dump the collected dust while it's recharging. I wouldn't mind if it has a bigger dustbucket and i would like it if it sucks more that the avarage robotic vacuum cleaner. I'm told that a cyclonic dust collector actually works pretty well so maybe i can include that into my wishes?
While considering my options i came accross a blog which had detailed plans for building a Dalek. The Dalek form is high enough to house a cyclonic dust collecter, has some edges at the base which would probably allow it to get into corners and it appeals to my inner nerd. So a clyclonic, robotic Dalek it must be. Of course i need to think of a way to have it empty it's dustbucket.
The Hardware
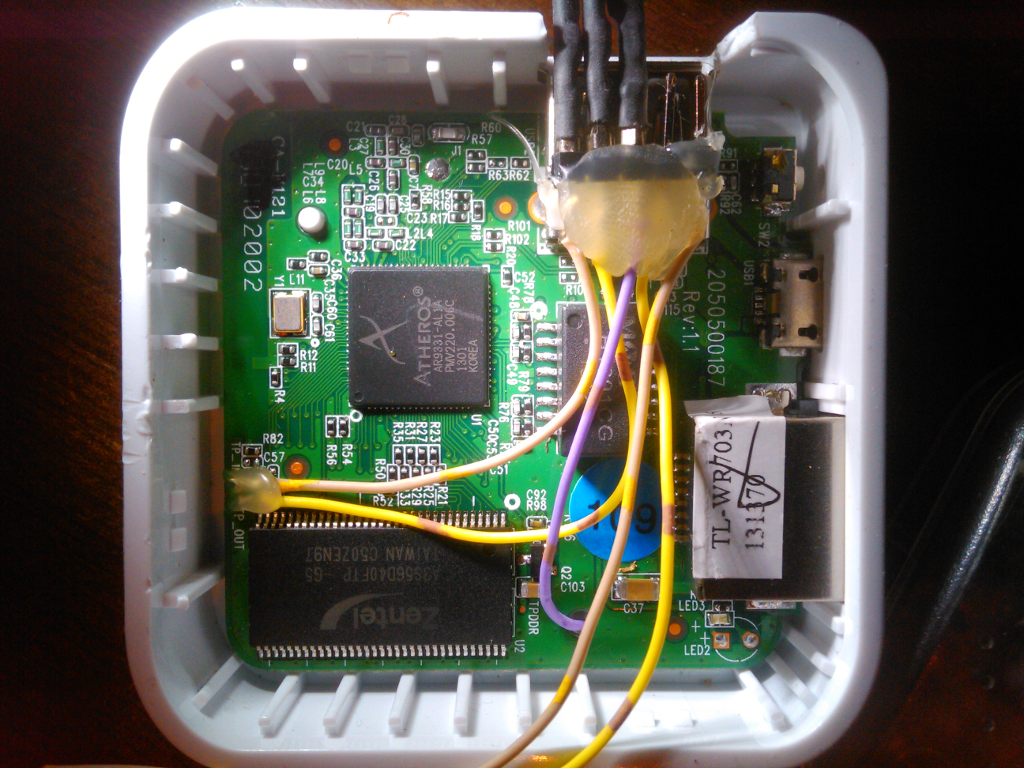
The robot should be controllable from a smartphone but over the internet would be nice as well which is why i chose wifi for the communication. I've got a bricked TP-link that will be perfect for the job provided i can get it up and running again. There's a hardware mod that breaks out i2c from the router board. The i2c will be used to interface between the router and various modules throughout the robot, motors, arms, head and such. The modular design will enable others to use parts they like in other projects.
I already have some ultrasonic and IR distancesensors that will be used. There will be some microswitch touch sensors in the base and probably something underneath to measure ground clearance and avoid falling down the stairs.
I want the robot to collect the information it gathers while cleaning and store it. It should be able to map it's surroundings, know where it can or cannot go and which places have already been done. Based on the data it should be able to move around in a smart way. In a later stadium i might even add some way of measuring the amount of dust it gathers so it knows which areas need to be cleaned more often.
I am just starting this project, there's a few bits and pieces i have laying around that might be usefull, and i'm thinking about size, function etcetera. My budget is minimum, if anyone feels the need to sponsor any part of this project don't hesitate to inform me.





 Kenny.Industries
Kenny.Industries
 Bill Weiler
Bill Weiler
 Duane Degn
Duane Degn
I saw this and thought 'Awesome'. Then I saw that it also has a purpose so it's Awesome squared (Awesome^2). A whole new 'level up'!