0%
0%
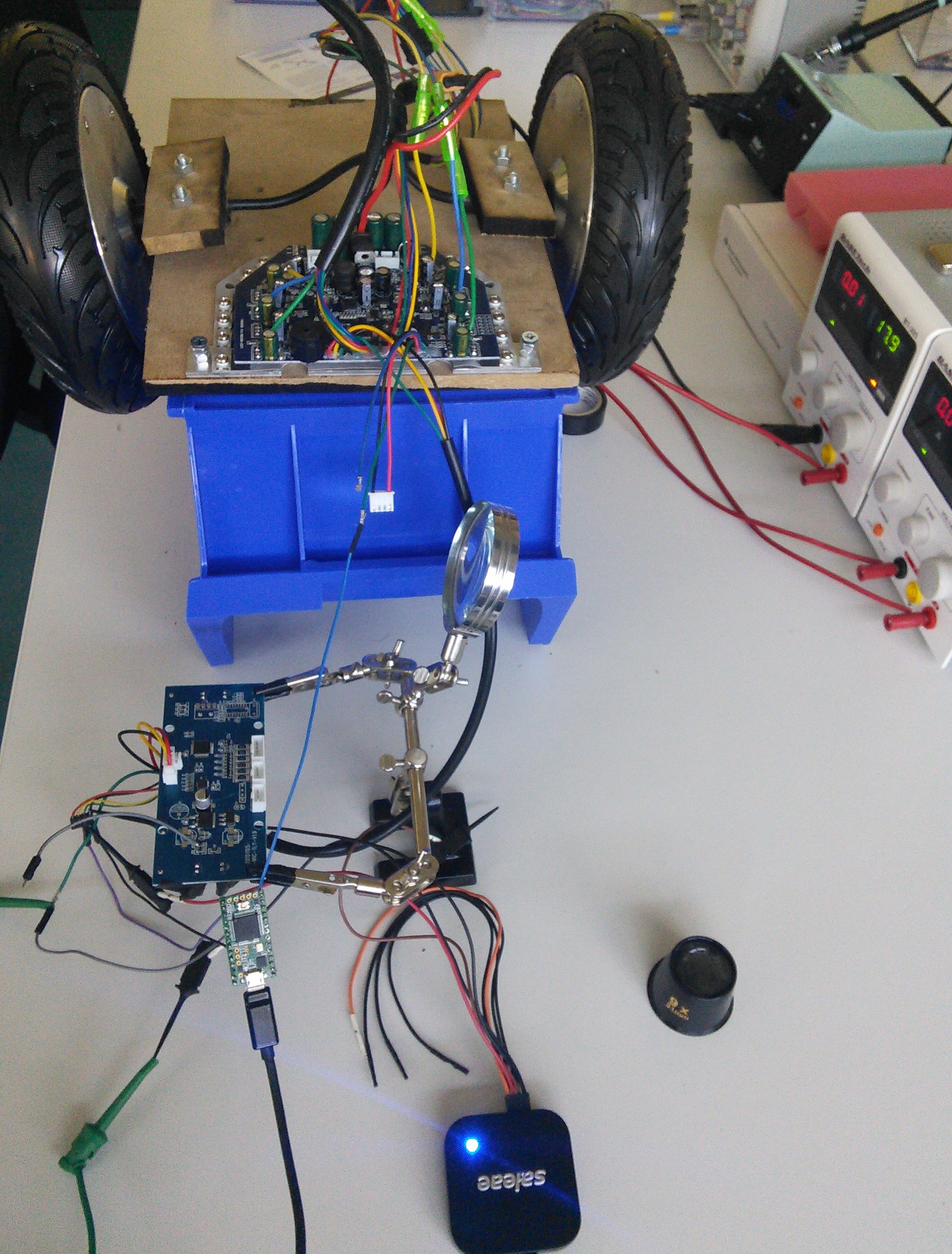
Low cost two wheels drive - hoverboard hack
Power your robot, chair, couch, with an overboard! Gives anything two wheels drive!
 Lahorde
LahordeBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Sergey Royz
Sergey Royz
 Tamandutech
Tamandutech
 pat92fr
pat92fr
 Russell Cameron
Russell Cameron
Seeing that you guys are smarter than me, especially regarding reverse engineering strange software, has there been any project to create a driver board which could be directly driven by a computer such as the raspberry pi?
I am looking into using and modifying the scooter controllers available cheap on ebay. Then control them with a PI board...
Any intrest?
william...