0%
0%
Encoder for Linear Actuators
Encoder to convert big linear actuators into big linear servos.
 stdlogicvector
stdlogicvectorBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Mayel Sorelus
Mayel Sorelus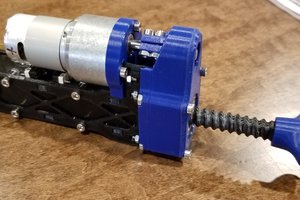

 Ozan Enginoglu
Ozan Enginoglu
Why? PID controllers don't care about absolute position. If there's something in your control system that needs absolute positioning, that's probably a bug.