 Tim Wilkinson
Tim WilkinsonFinally assembled the full RoBonnet v0.4 today (seen here with the previous version above).
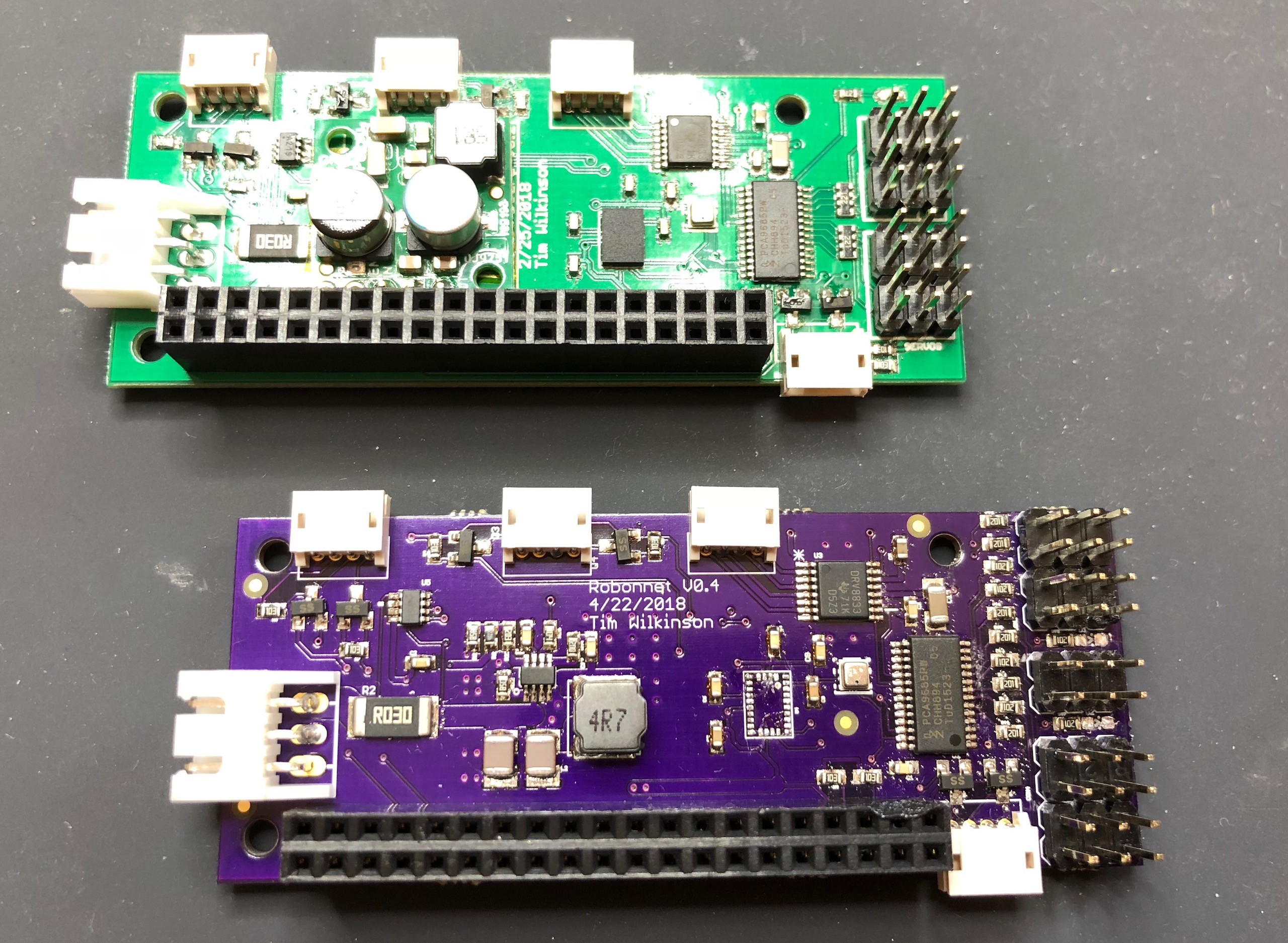
The major changes on this version where the integration of the buck converter and the expansion of the PWM outputs to 10 (from the original 8). Preliminary testing has been excellent, the board running the ball robot without a hitch.
Note the absence of the IMU from this test board. I did *try* to include it but it failed. I hate assembling the BNO055 (I think I get about 1 in 3 to work) and find it very tricky to work with. However, the layout for it is unchanged from the previous board where it operated flawlessly.
The next step for the hardware is to have some board professionally made. I'm thinking of using MacroFab.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.