 Tim Wilkinson
Tim WilkinsonThe goal of the 8BitRobots project is to make it easy to 3D print, build and program a set of robots with only a few extra pieces. The simplest robot I could come up with ... which wasn't completely boring ... was a two wheeled rolling ball robot. I've previous logged an exploded diagram of this robots construction, but now seems like a good moment to go over all the pieces.
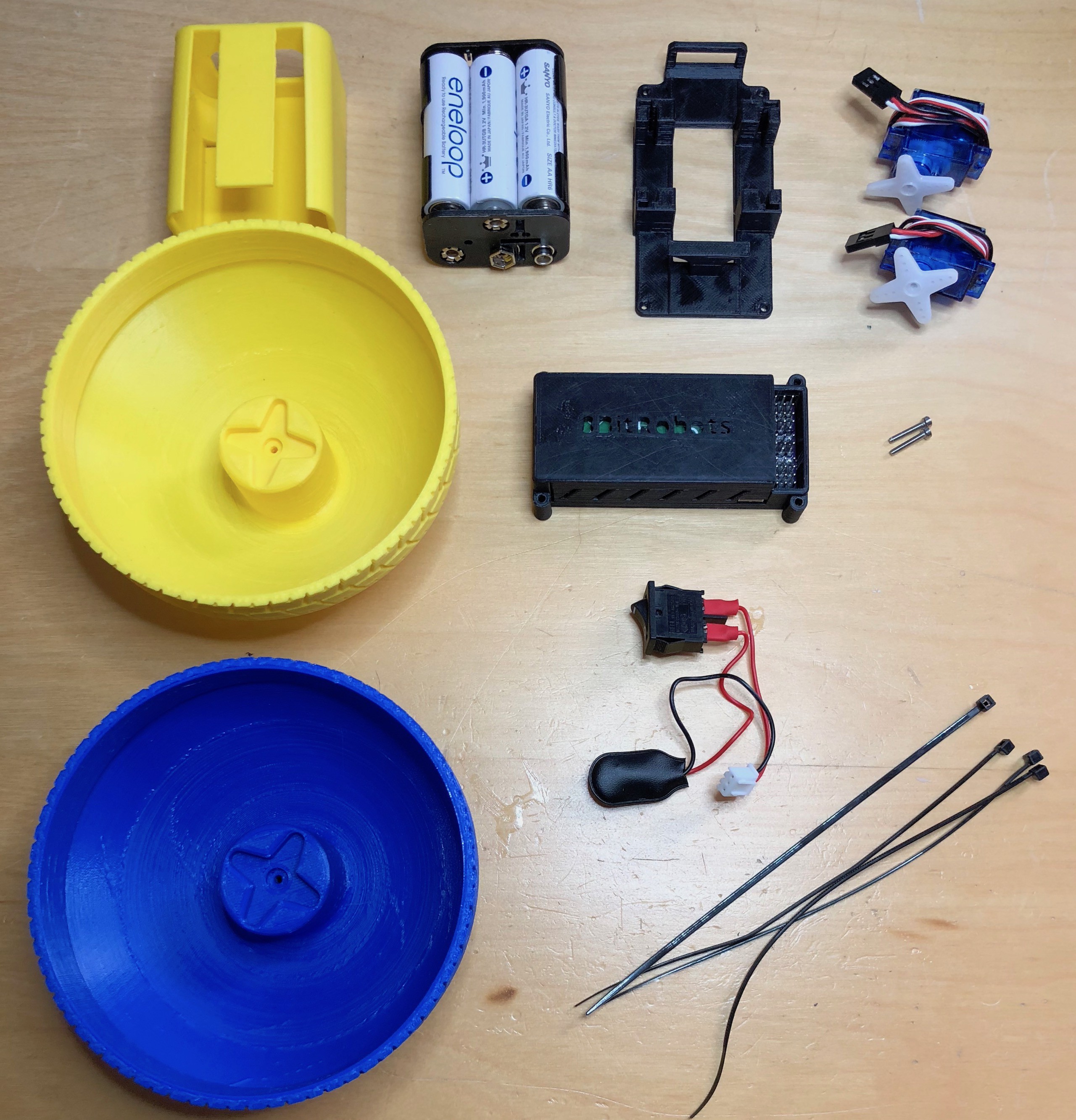
Starting top/left:
- 1x 3D printed battery clip - used to hold the batteries inside the robot
- 6x AA batteries in holder
- 1x 3D printed robot mid-frame - to which everything else is attached
- 2x FT90R continuous servos
- 1x 3D printed robot wheel - color one
- 1x 8BitRobot module in the default 3D printed module case
- 2x M2 12mm bolts
- 1x 3D printed robot wheel - color two
- 1x Power switch, battery connector and 8BitRobots power connector
- 4x 150mm zipties
A few notes on the pieces. I selected continuous servos for the robot's motors because they were the easiest to source, use and mount. They might not be the best way to power a robot wheel, but the goal was simplicity first. I wanted to avoid using screws and bolts as much as possible. Most pieces are held together using zipties, but bolds were unavoidable when it came to attaching the wheels. Finally, the switch and power connectors was purposely constructed and really any old way to connect the batteries to the module would do.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.