 Walter Dunckel
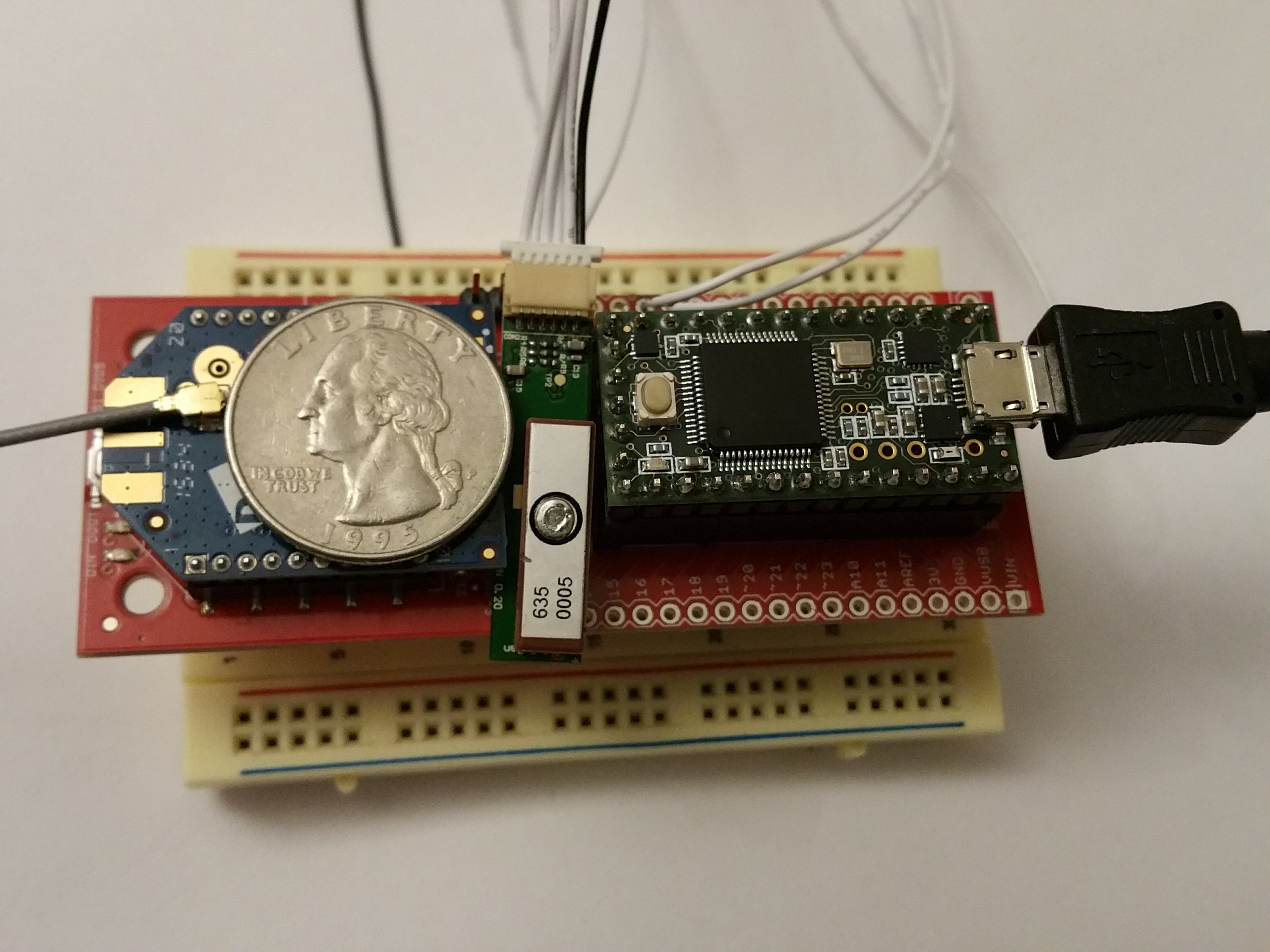
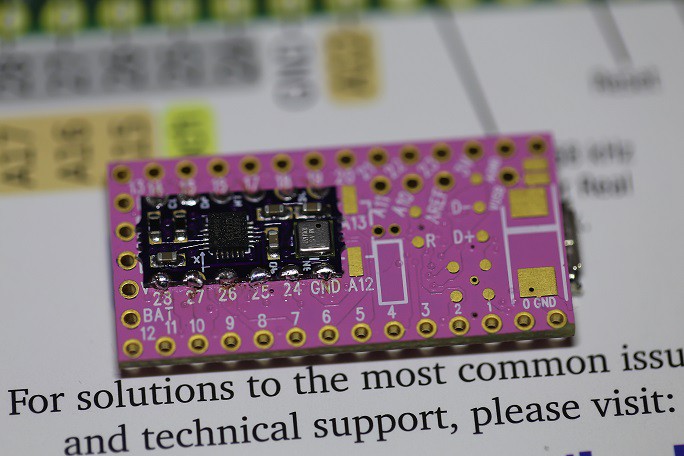
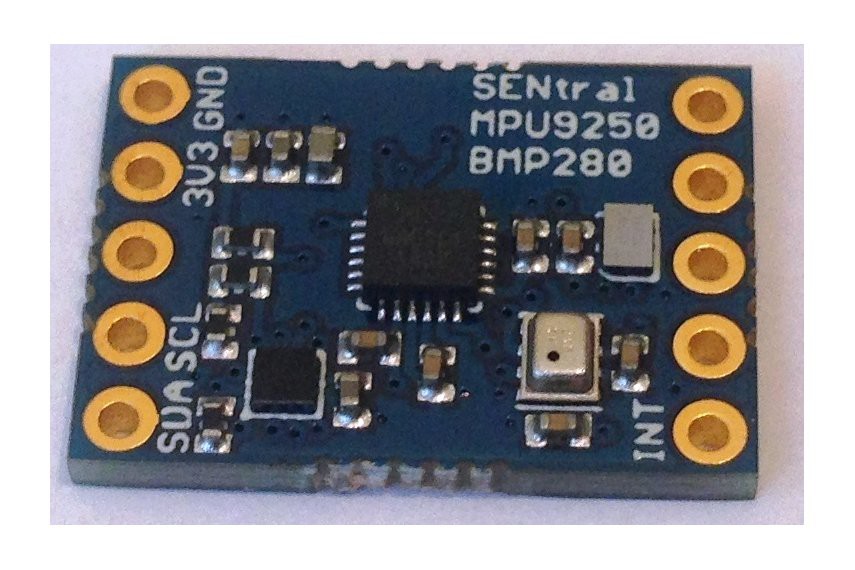
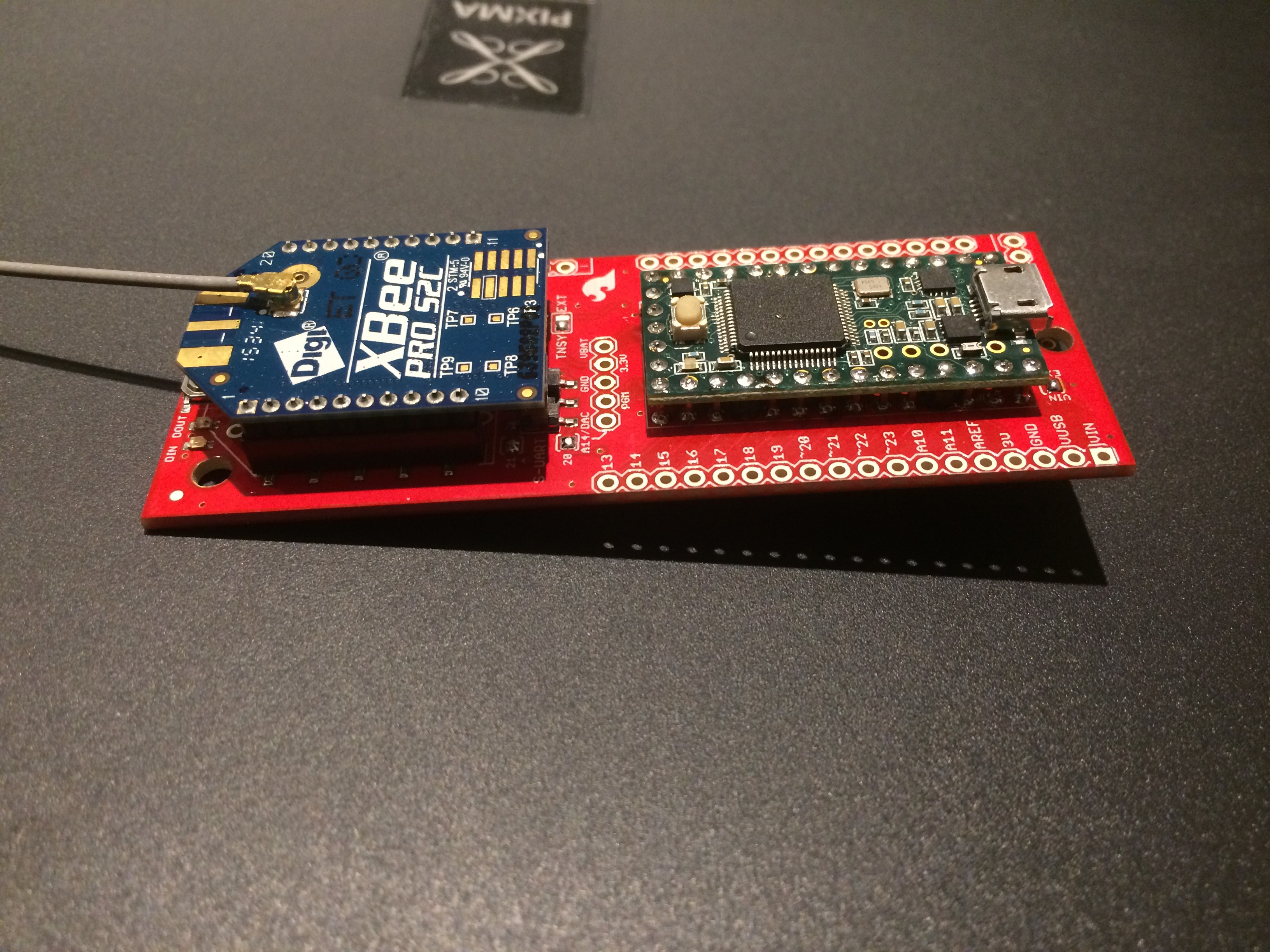
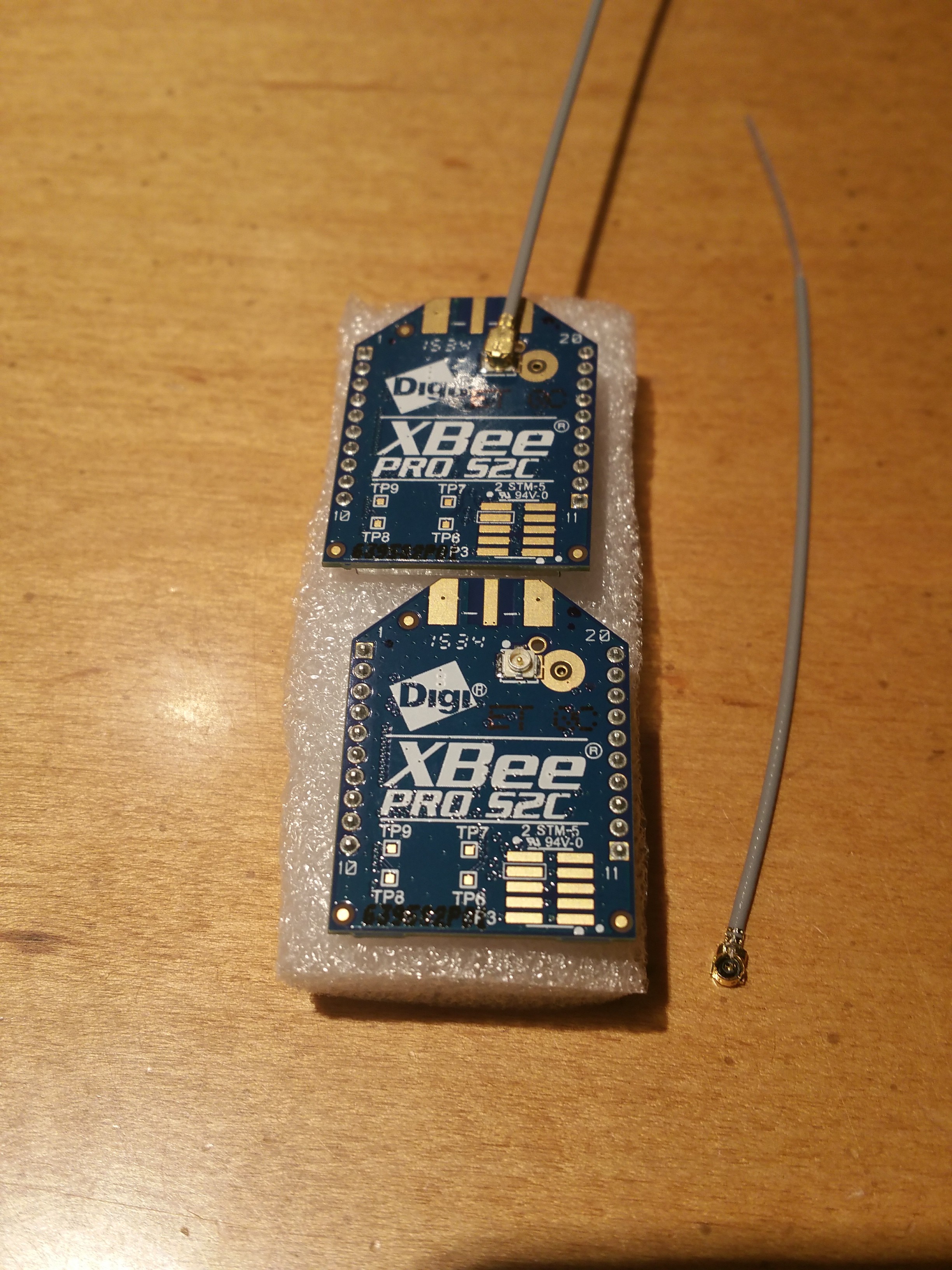
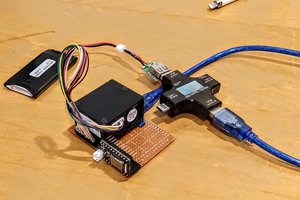
Walter DunckelHere is a video of how the Teensy works with the Prop Shields 9dof sensors and wireless XBee communications:
0%
0%
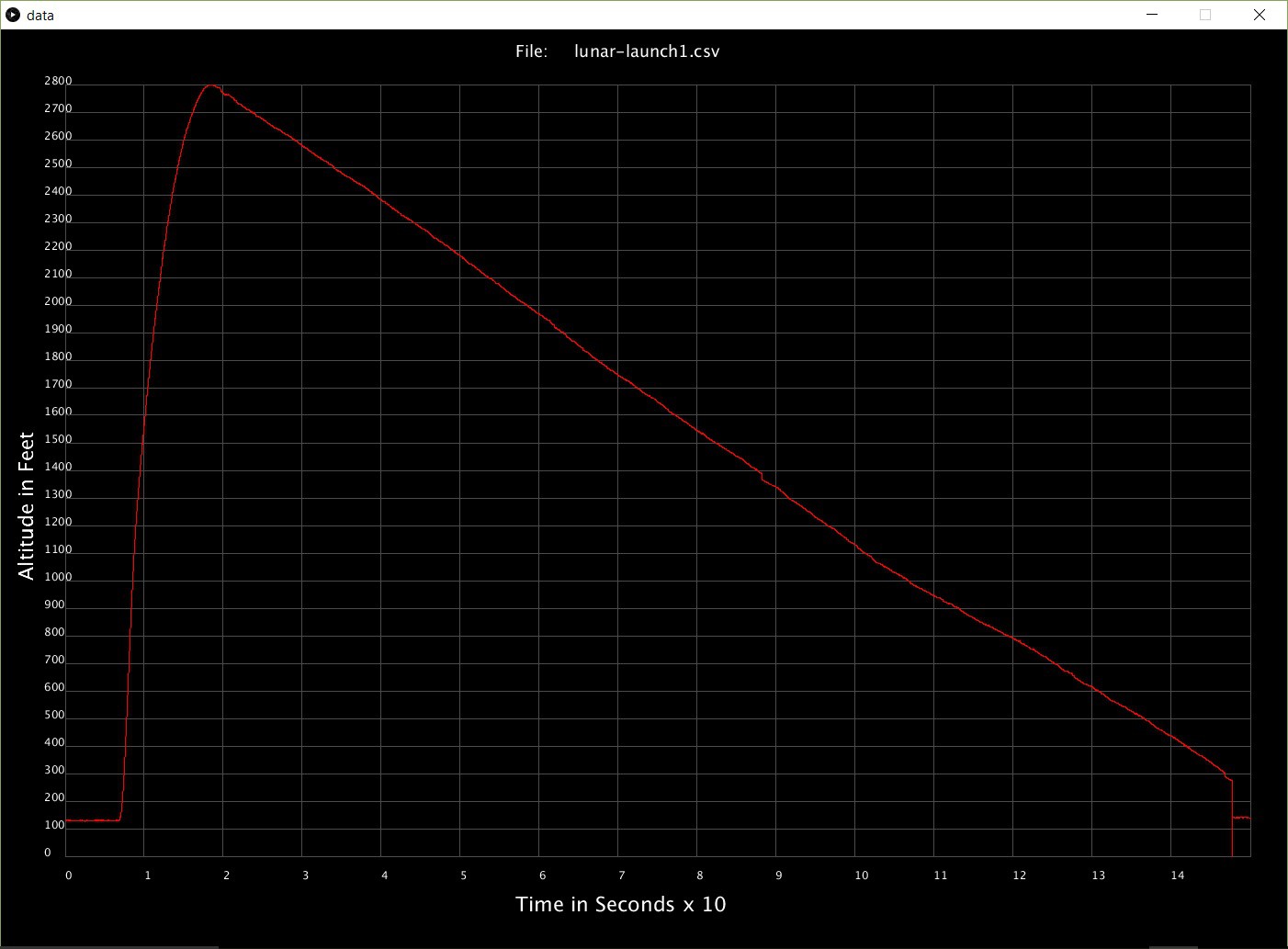
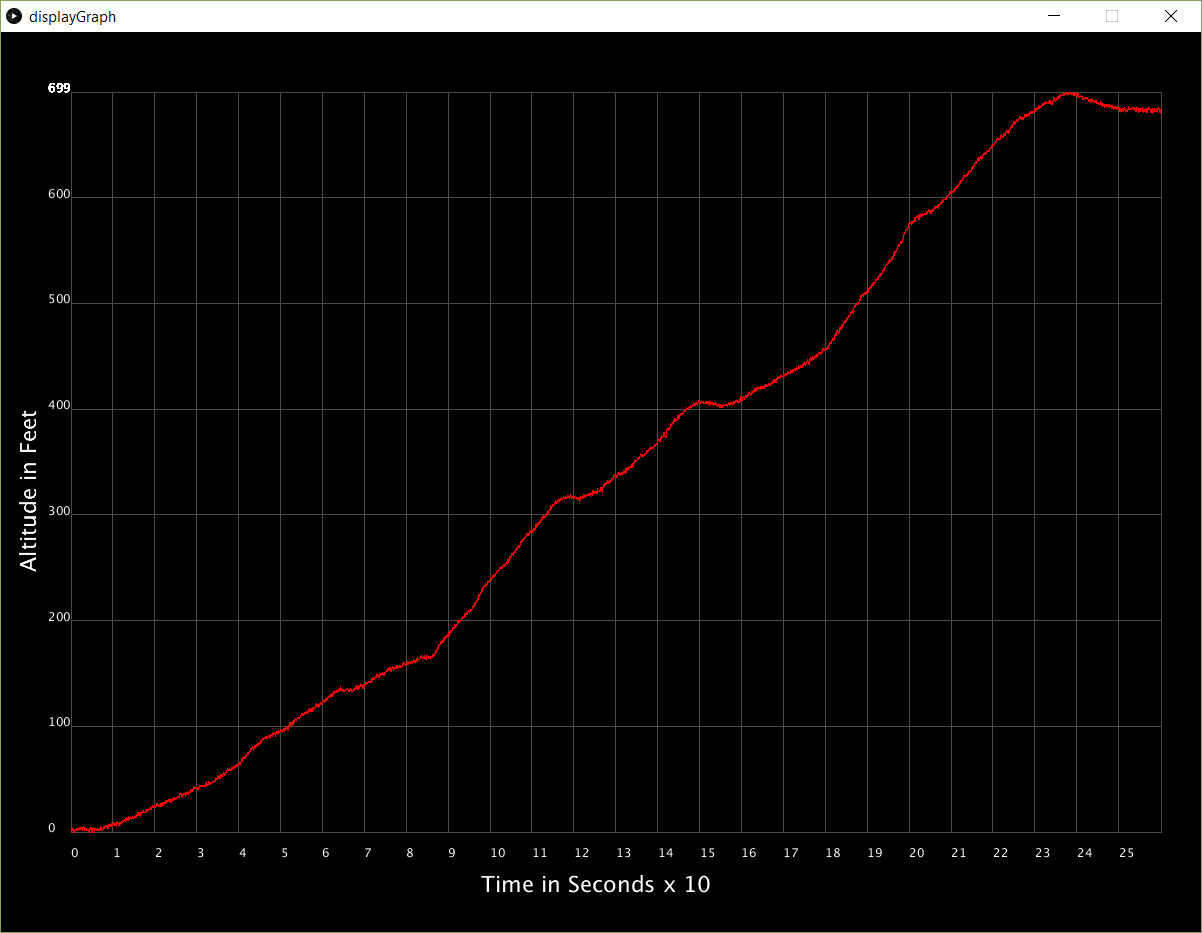
Rocket real-time transponder and GUI
My goal for this project was to use off the shelf components to build a real-time rocket altimeter on steroids at a reasonable price.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 sparks.ron
sparks.ron
 parasquid
parasquid
 Ashwin K Whitchurch
Ashwin K Whitchurch
Sadly, I have not worked on the altimeter lately. But I recently discovered that arduino has a Talkie speech library with hundreds of pre-made words. It is looking like it will be easy to add a talking altimeter to this project, seeing as the prop shield just needs a small speaker to be added to it (as far as hardware is concerned). I have run a few samples from the Teensy Talkie library, and get coherent words out of my tiny piezo speaker. The Teensy Talkie Speech library can be downloaded from here: https://github.com/PaulStoffregen/Talkie There is some information about it on the Teensy forum here: https://forum.pjrc.com/threads/33446 And if you are like me and wondering how the heck they came up with this, there is some general arduino Talkie information here, which talks about some of the different word libraries and where they came from: https://github.com/going-digital/Talkie And a video with android talking