Carl Bugeja
Carl Bugeja-
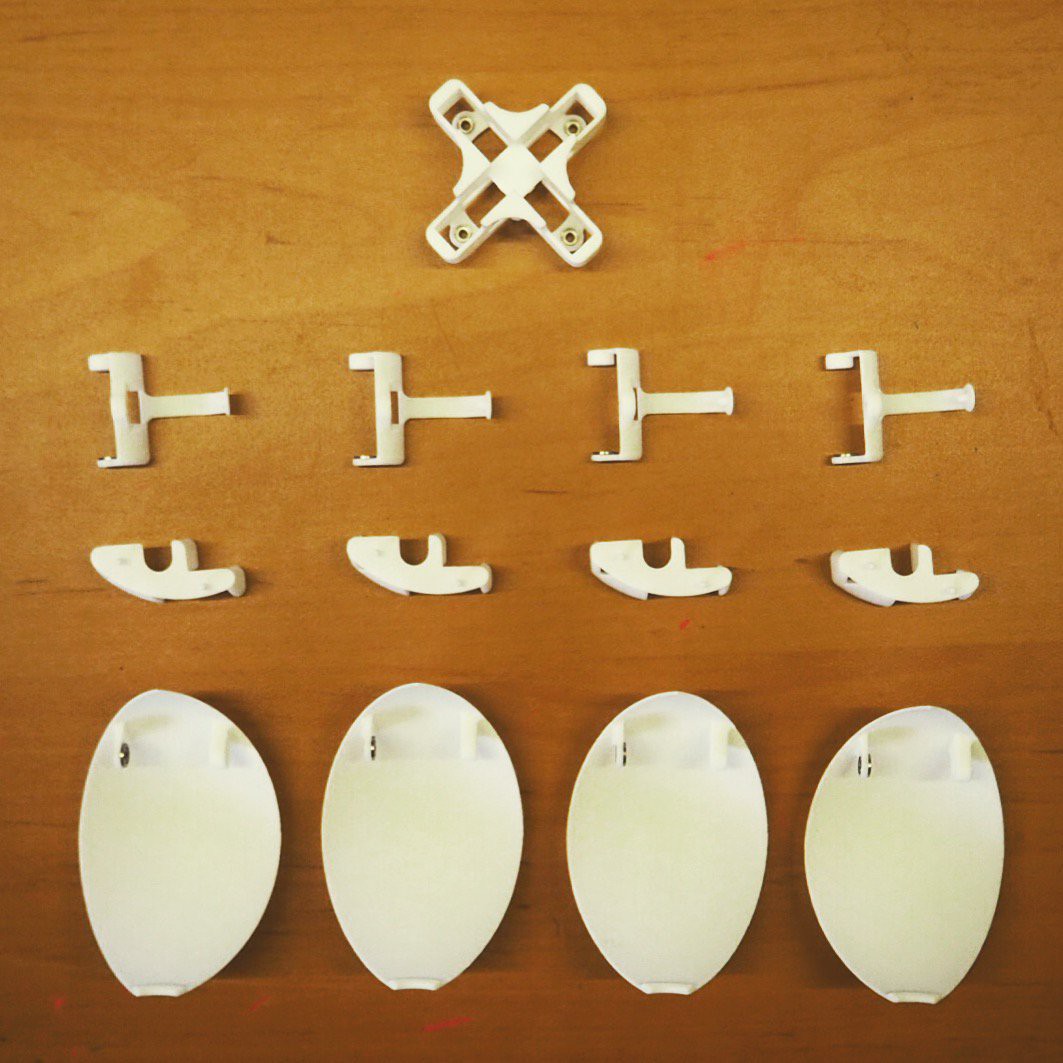
3D Printed Parts
05/31/2018 at 20:09 • 0 commentsAll the 3D printed parts of 4B, printed from shapeways's strong & flexible nylon.
![]()
-
Servo Motors
05/30/2018 at 21:32 • 2 commentsThis is not my first quadruped robot I've build (https://hackaday.io/project/39427-flypod). One the most important things I've learned from this past project is that the selected servo-motors must be of very good quality. If one out servo is acting crazy, your twelve motor walking robot is doomed.
After a lot of research I ended up narrowing the choice to the HK-5320 and HK-5330 for this project. Both of these servo-motors are under 2grams and can working with a 1S LiPo battery. The only difference between these servo motors is the dimensions and the torque. The HK-5320 measures 20x6.2x18mm and has a stall torque of 0.075kgcm, while the HK-5330 measures 20x6.2x23mm and has a stall torque of 0.17kgcm.
So for the HK-5320 the robot's total weight can reach around 37.5grams (worst joint on 3legs), while for the HK-5330 a the robot's total weight can reach around 85grams.
The mass of my robot should not exceed 50grams, so my aim is to use a combination of these servomotors, using the HK-5330 for the joints that require larger torque.
![]()
-
3D Model
05/30/2018 at 17:24 • 2 commentsThis is 4B's first 3d model prototype. The main parts consists from a base, 4 coxa linkages, 4 femuer linkages and 4 tibia linkages. The base and femuer linkages houses the HK-5320 micro servomotor.
Most of the robot's weight is positioned at the centre. This includes the battery, pcb and four out of the twelve servo motors. This low centre of gravity will give the robot more stability.
![]()
-
Concept
05/28/2018 at 19:22 • 0 commentsMy idea behind this project is to design a 12 degrees-of-freedom quadruped robot that folds into a 6cm diameter ball. This way the robot could both walk and roll. The trick is to divide the sphere into four and use these as the robot's tibia linkage. The rest of the leg's linkages need to fold into the same sphere.
The challenge of this project is to fit all the mechanical parts, 12 servo-motors, the battery and the pcb into a very small space.
![]()