 Carl Bugeja
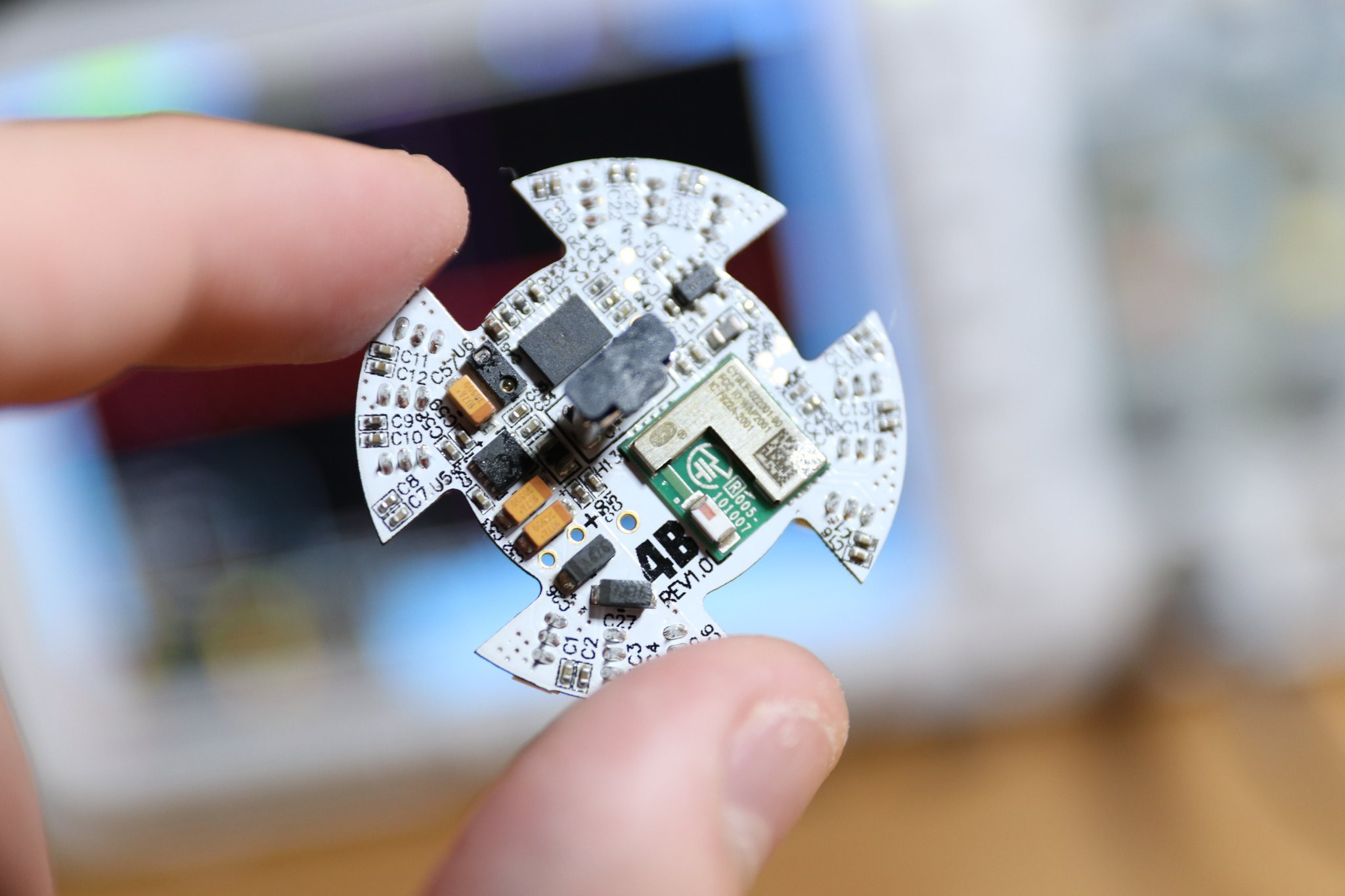
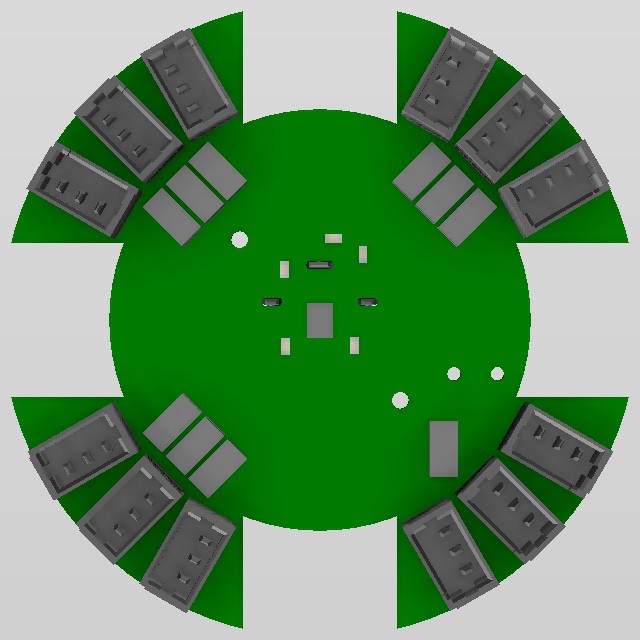
Carl Bugeja4B is a hybrid robot that can be able to both walk and roll. It has three linkages (coxa, tibia and femuer) on each leg which folds into a 6cm diameter ball. That’s smaller than a baseball! To do so, every linkage had to perfectly align into the sphere while leaving space for the battery and pcb.












 DIY GUY Chris
DIY GUY Chris

can i make it