 Cole B
Cole B-
13D Printing
3D print the required components. All files can be found at: https://github.com/Team-Automata/Modular-Universal-Jamming-Gripper/tree/master/3D%20Printer%20Files. Print all .stl files found in this folder.
-
2Fill Balloon
Fill the balloon with coffee grounds.
- Fit the end of the balloon over the end of a section of PVC pipe
- Fill pipe with coffee using funnel
- Use air compressor to push coffee grounds into balloon
- Pinch neck of balloon and slowly release air
- Repeat
![]()
![]()
-
3Gripper Assembly
Assemble the gripper.
1. Put balloon in and roll up extra length of neck so that the balloon is snug in funnel
![]()
2. Wrap air nozzle in teflon tape and secure between nozzle clamps
![]()
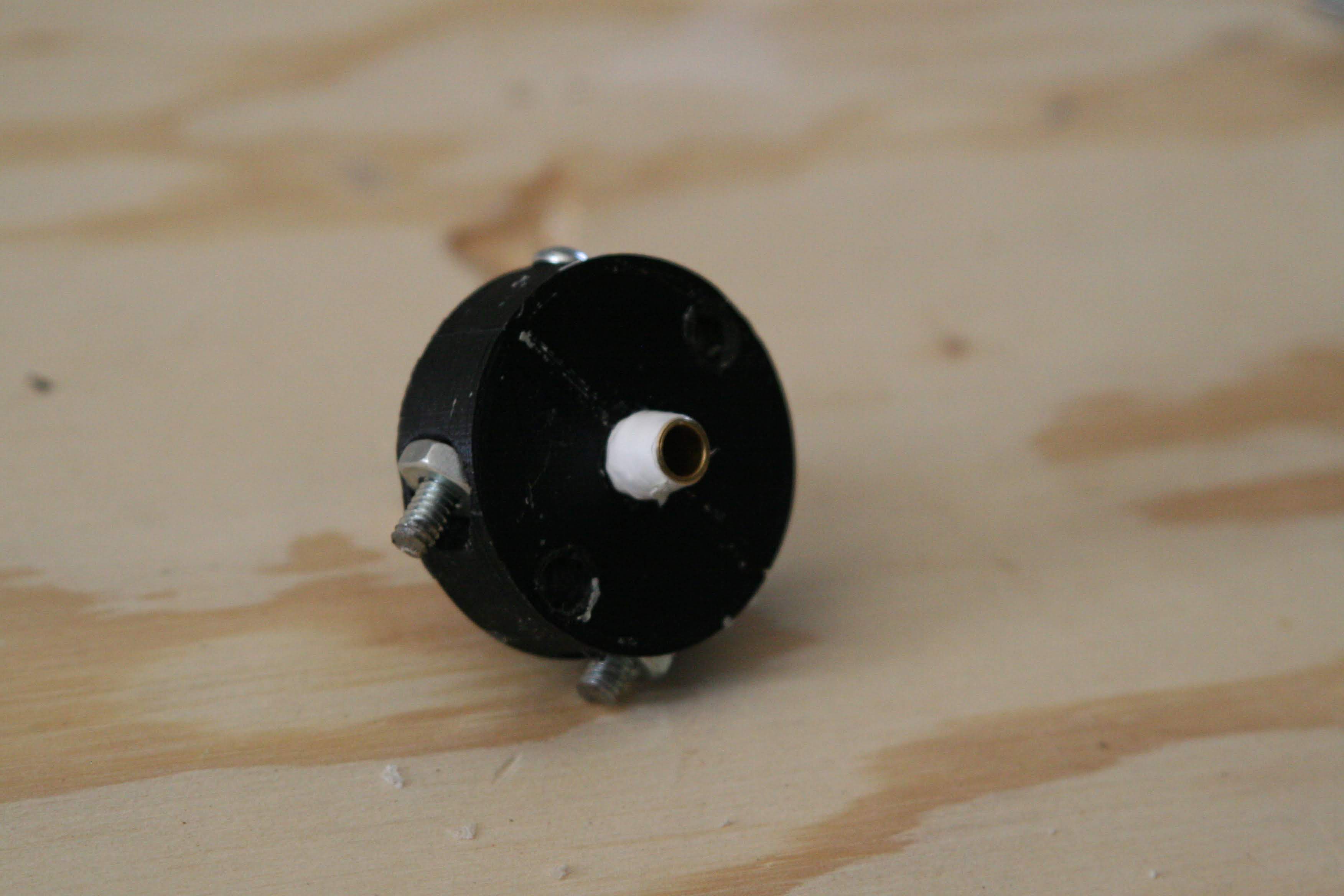
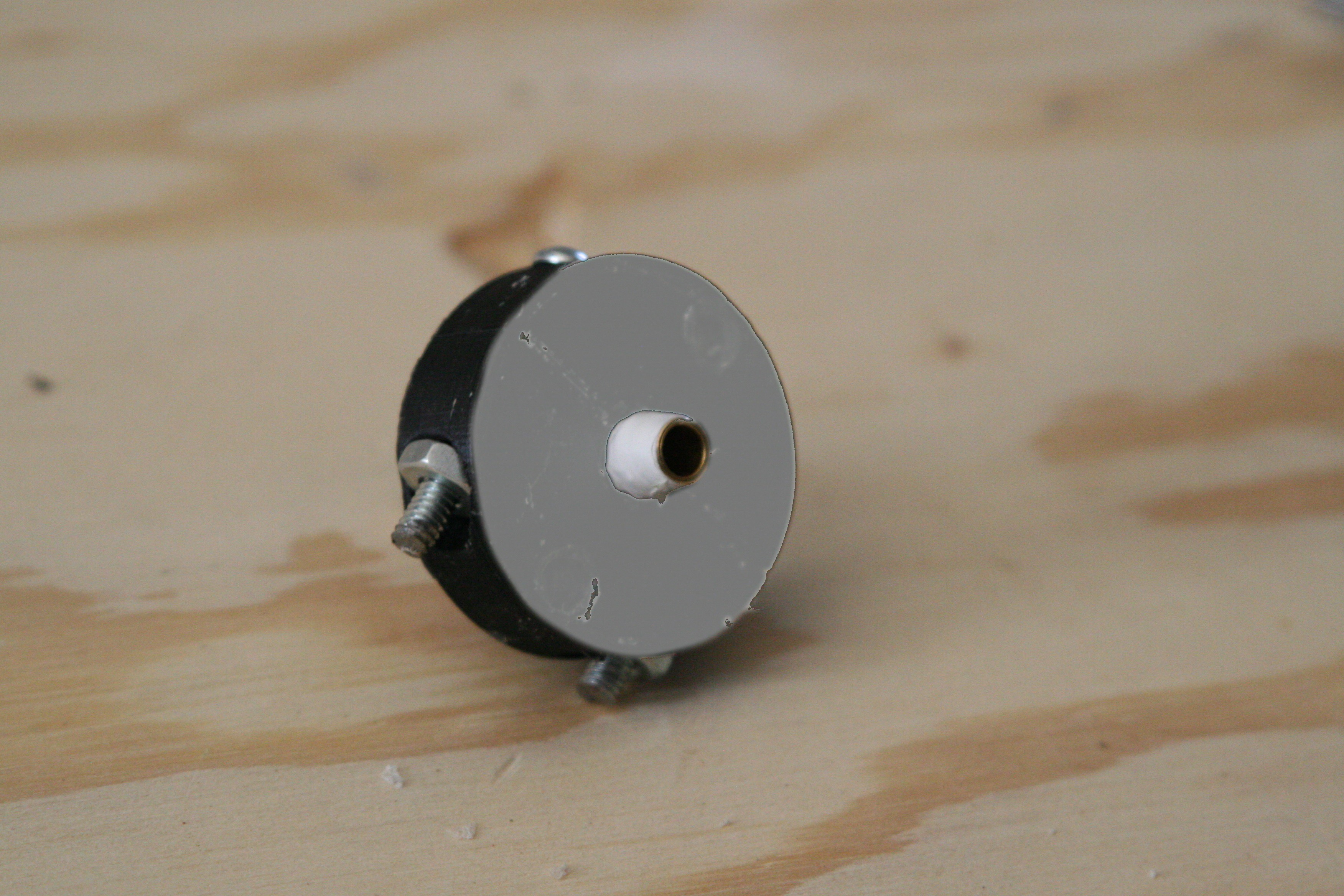
3. Seal nozzle with silicone caulking in the highlighted area
![]()
4. Attach nozzle before silicone dries
![]()
5. Secure lid on gripper assembly
![]()
6. Attach hose and air filter
![]()
-
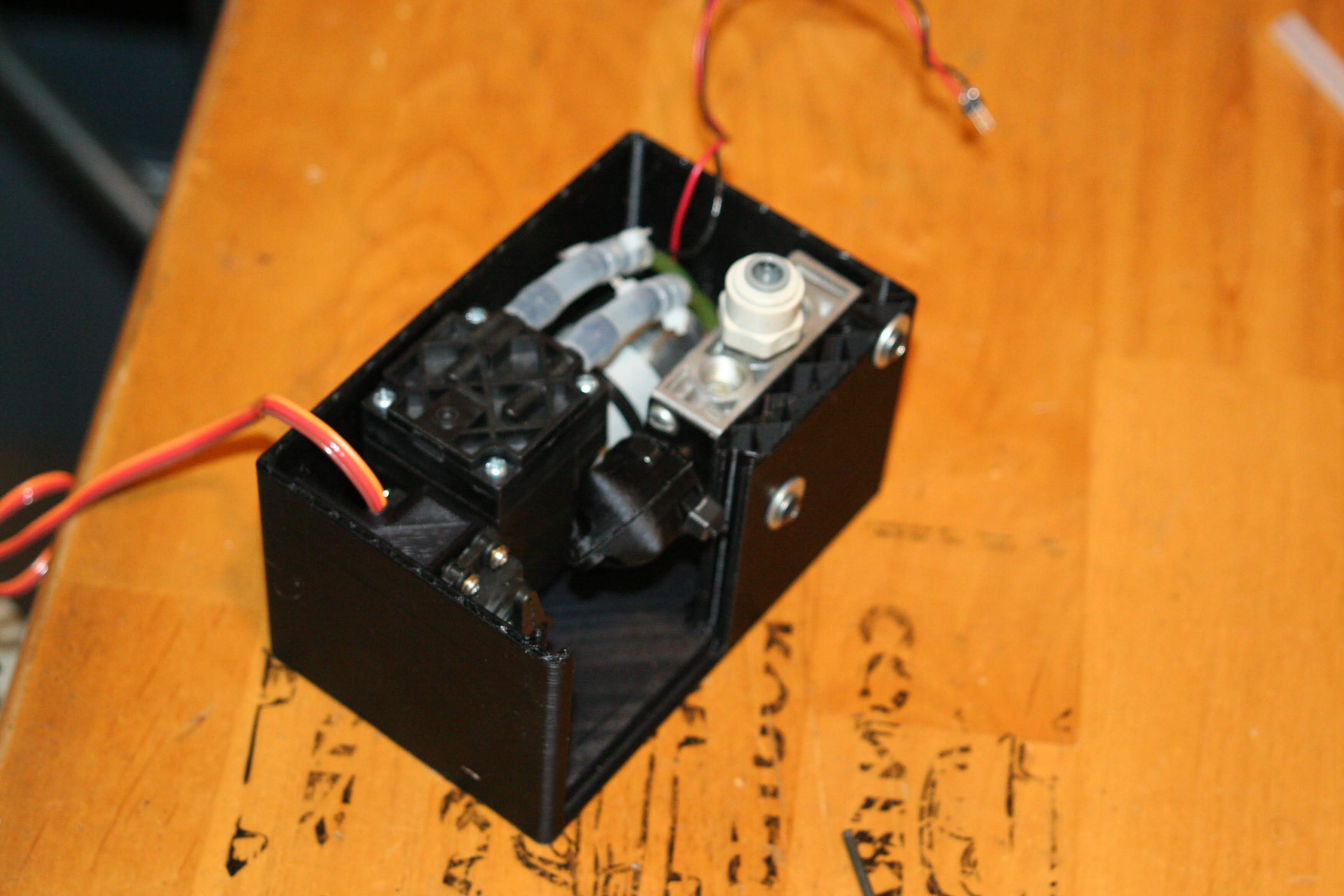
4Control Box Assembly
Assemble the control box.
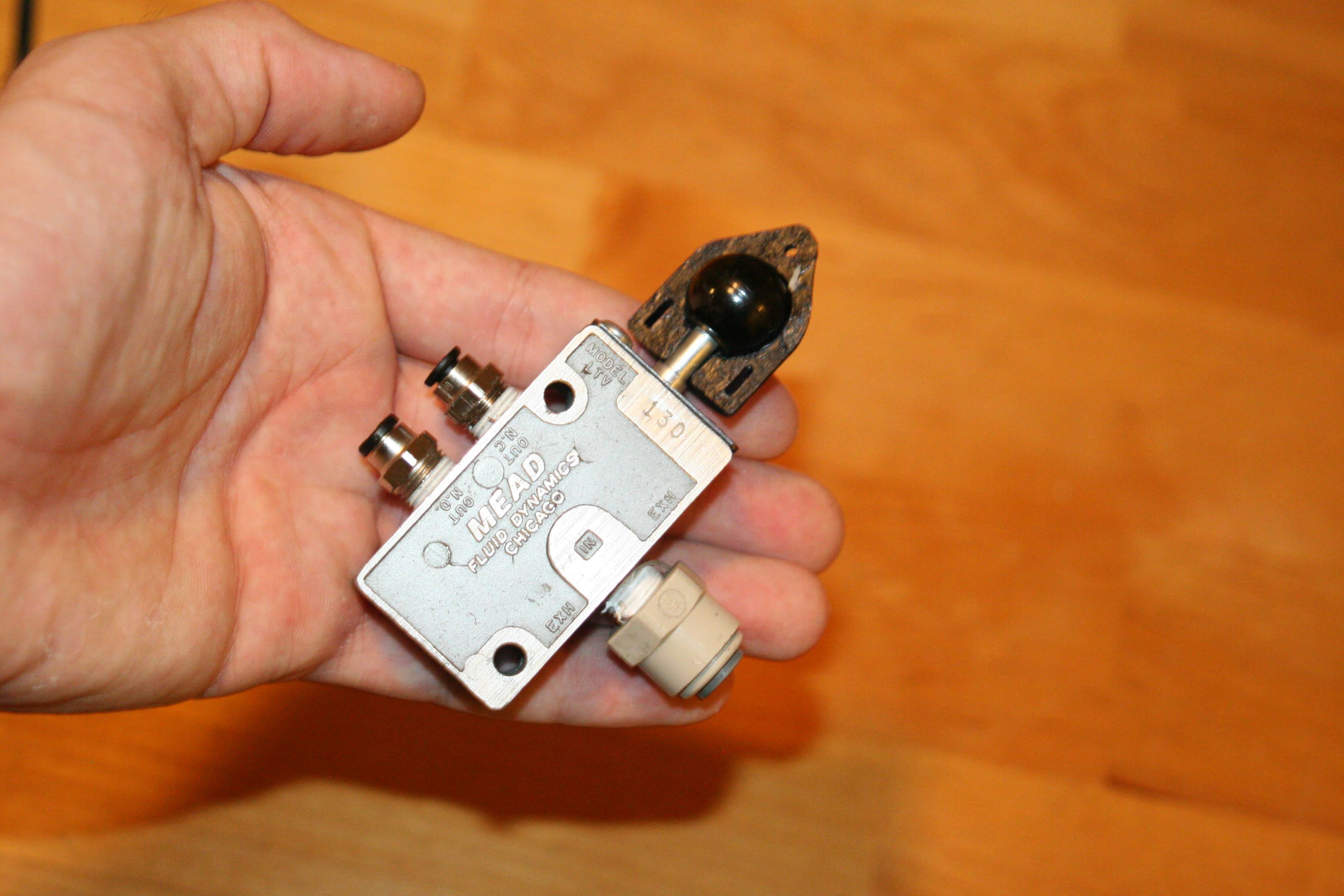
1. Attach the air valve clamp to the valve using a zip tie and attach two small hoses to the air inputs on the valve
![]()
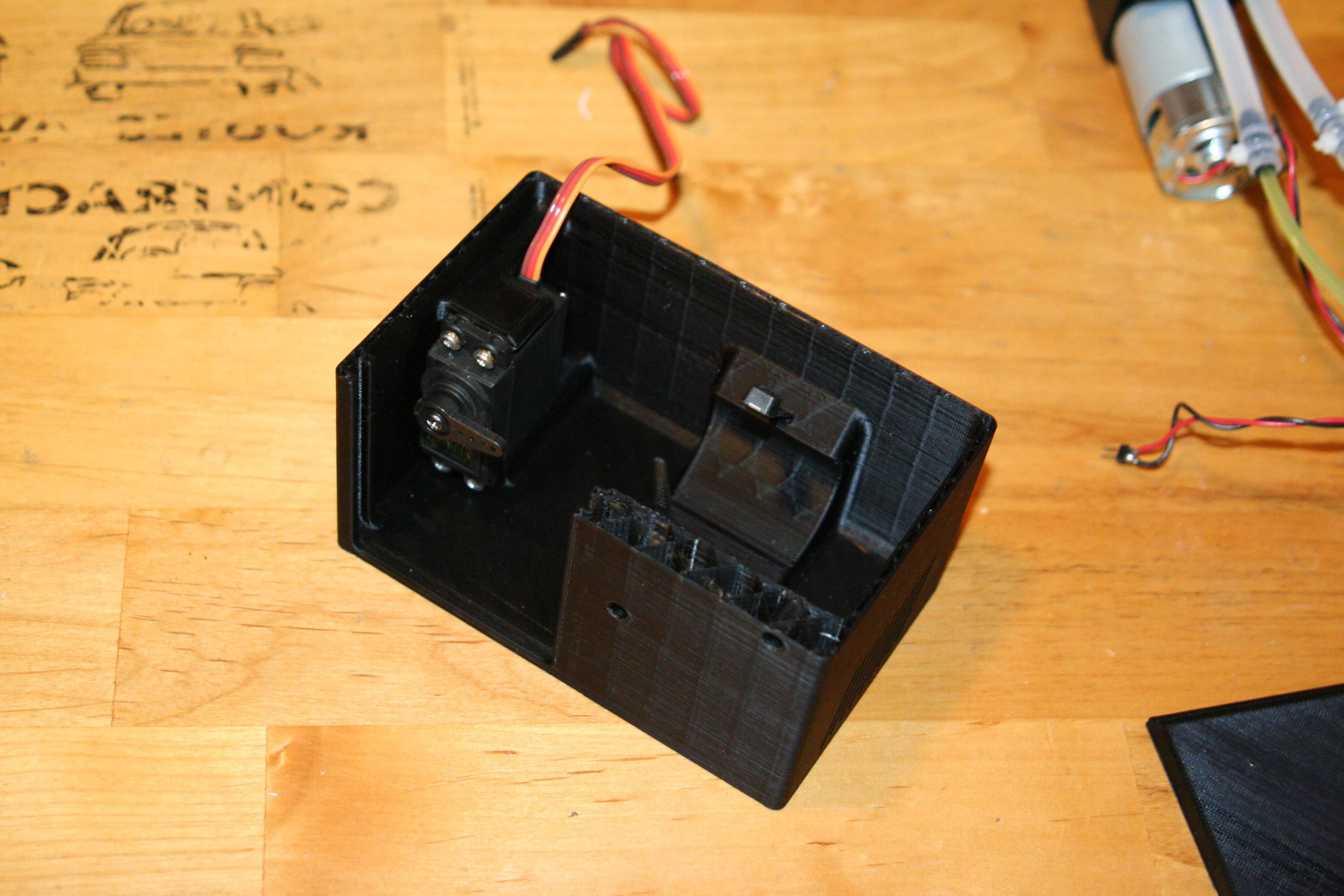
2. Attach the servo
![]()
3. Attach pump using zip tie around motor and connect small hoses from valve to outputs on pump. To adapt between hose sizes, wrap the small hoses in electrical tape and secure them inside the large hoses using zip ties
4. Attach air valve using #8-32 bolts
5. Add piano wire linkage between servo arm and air valve clamp
![]()
-
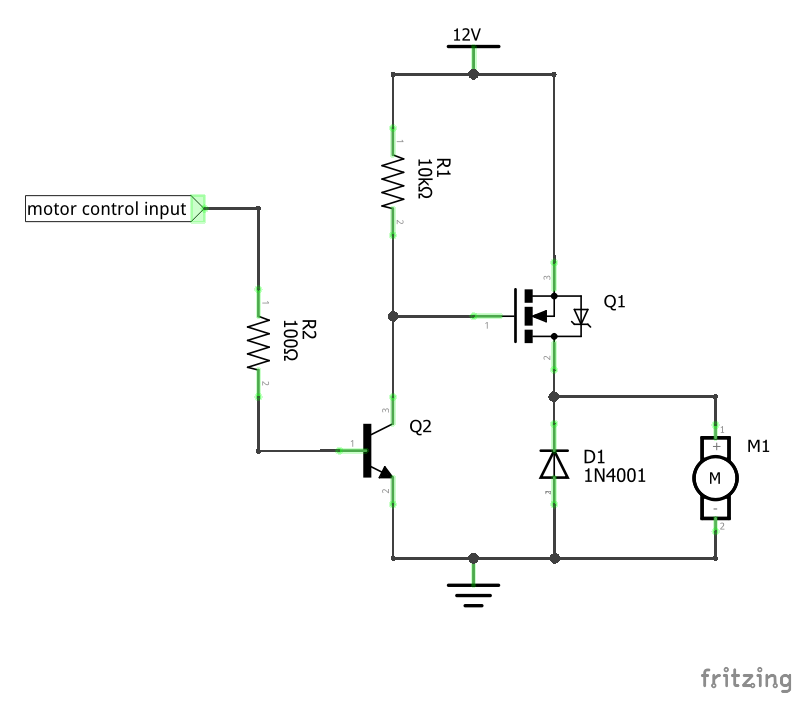
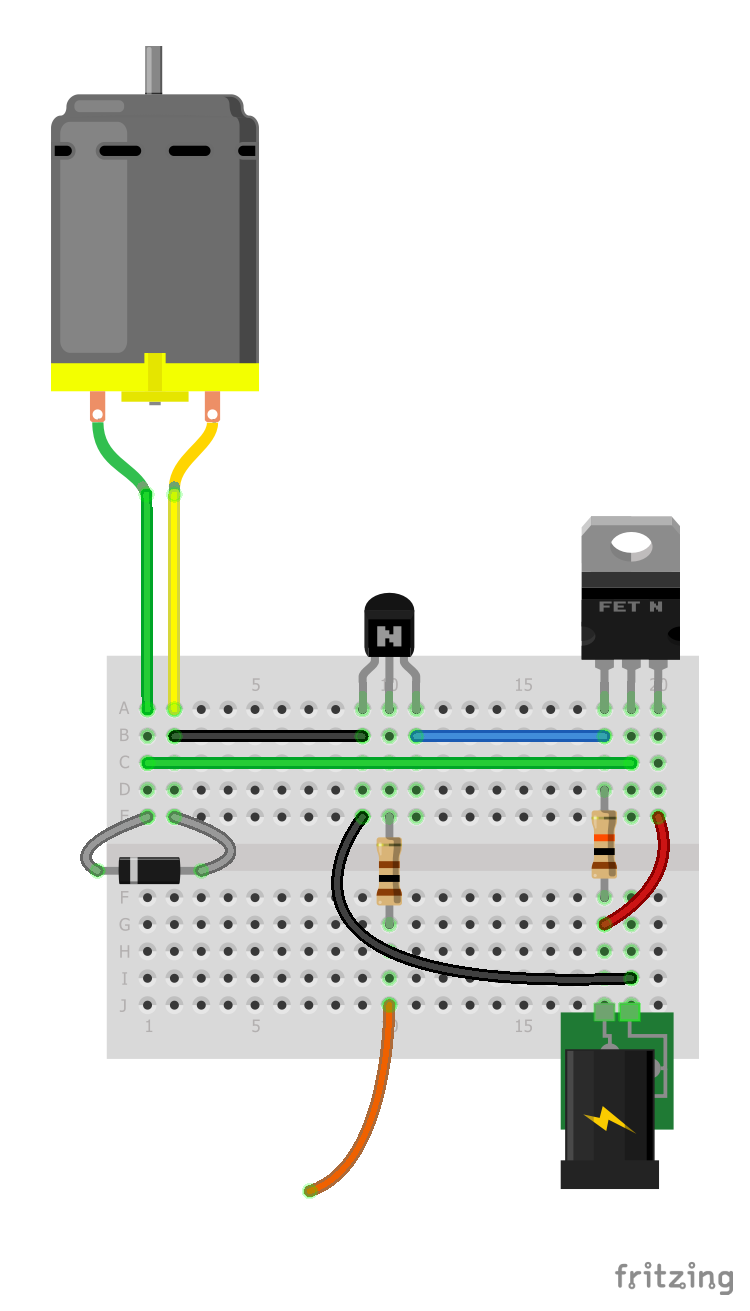
5Electronics
If desired, assemble the following circuit on a protoboard. You could also use a motor driver shield.
![]()
![]()
-
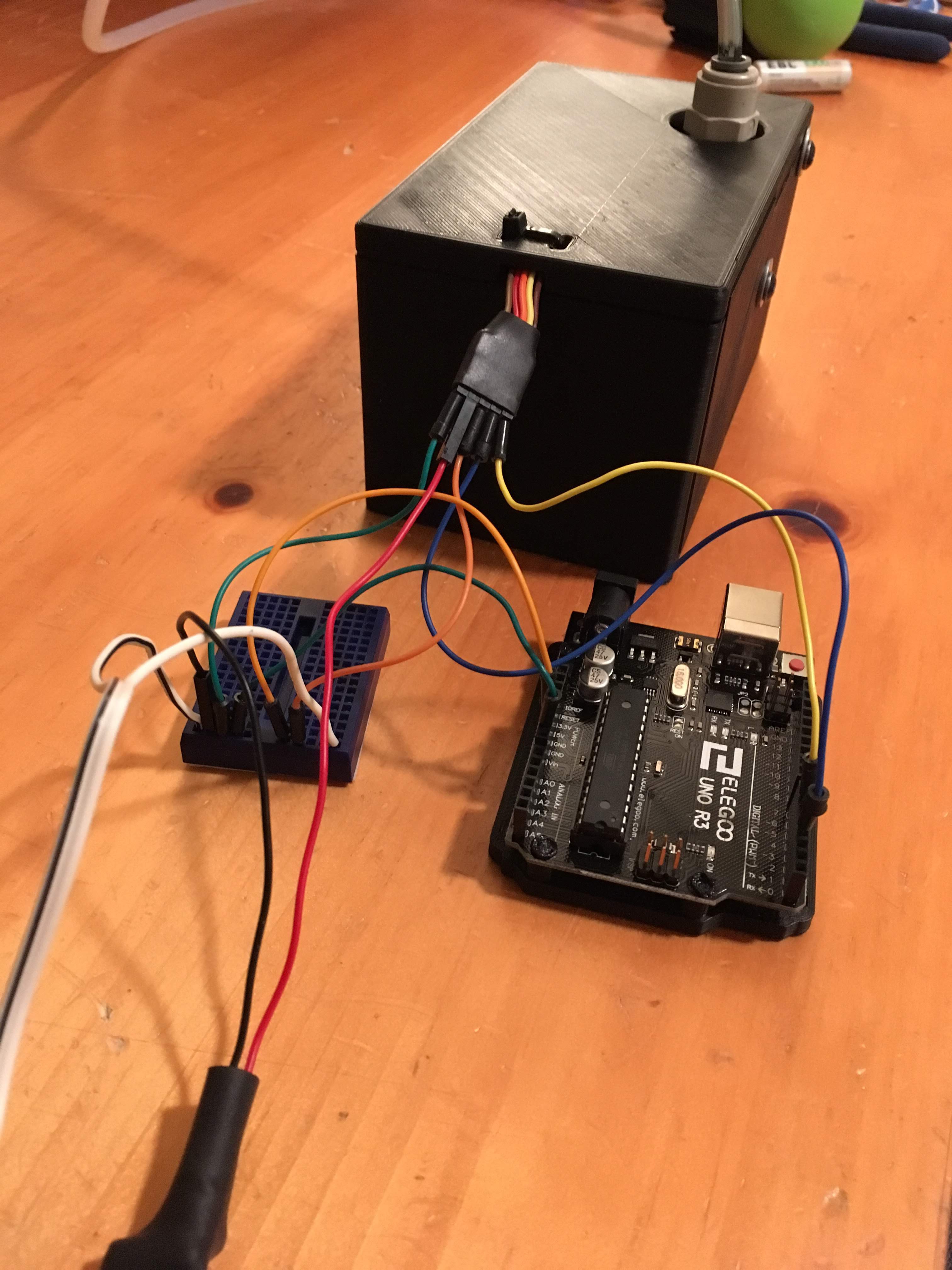
6Final assembly
- Put the lid on the control box
- Connect the air tube connected to the gripper to the valve output
- Connect ground, 5V, 12V, pump enable, and servo control wires
![]()
-
7Programming
The pump is controlled using a digital output, and the servo can be controlled using the Arduino Servo library. Example code can be found here: https://github.com/Team-Automata/Modular-Universal-Jamming-Gripper/tree/master/Code/ModularJammingGripper
Modular Universal Jamming Gripper
Universal 3D printed gripper for robotics.






Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.