 M. Bindhammer
M. Bindhammer-
Speech recognizer and voice synthesizer
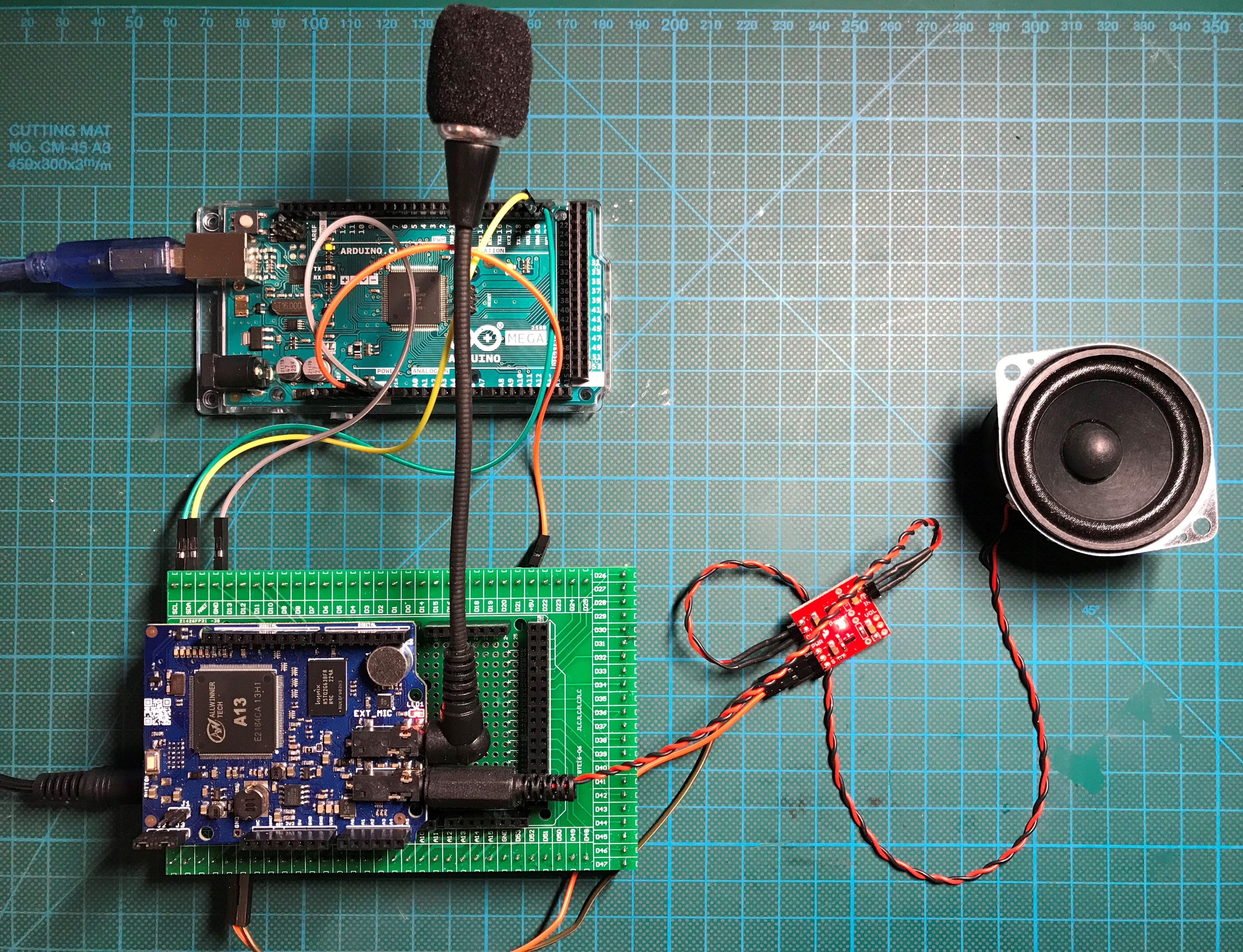
12/15/2018 at 13:41 • 0 commentsI am using the MOVI Arduino shield for speech recognition and speech synthesis. MOVI is cloudless and therefore privacy friendly, no Internet or PC connection required. In the little setup below I am testing I2C communication between two Arduino Mega's. A char array will be created by typing some text into the serial monitor. The text will be transmitted to the second Arduino, and MOVI is then doing the text-to-speech synthesis. I still need to experiment with different loud speakers, amplifiers and resonating bodies to get a really beefy sound.
![]()
-
Console
12/12/2018 at 19:32 • 0 commentsI managed to finish the design of the so called console, one of the human-machine interfaces of the robot. It consists mainly of a 3.2" touch TFT, two 16 ways capacitive touch keypads based on the TTP229 capacitive sensor with accurate sensing of up to 16 points, an Arduino Mega, a Mega touch TFT shield and some 3-D printed parts:
![]()
Assembly
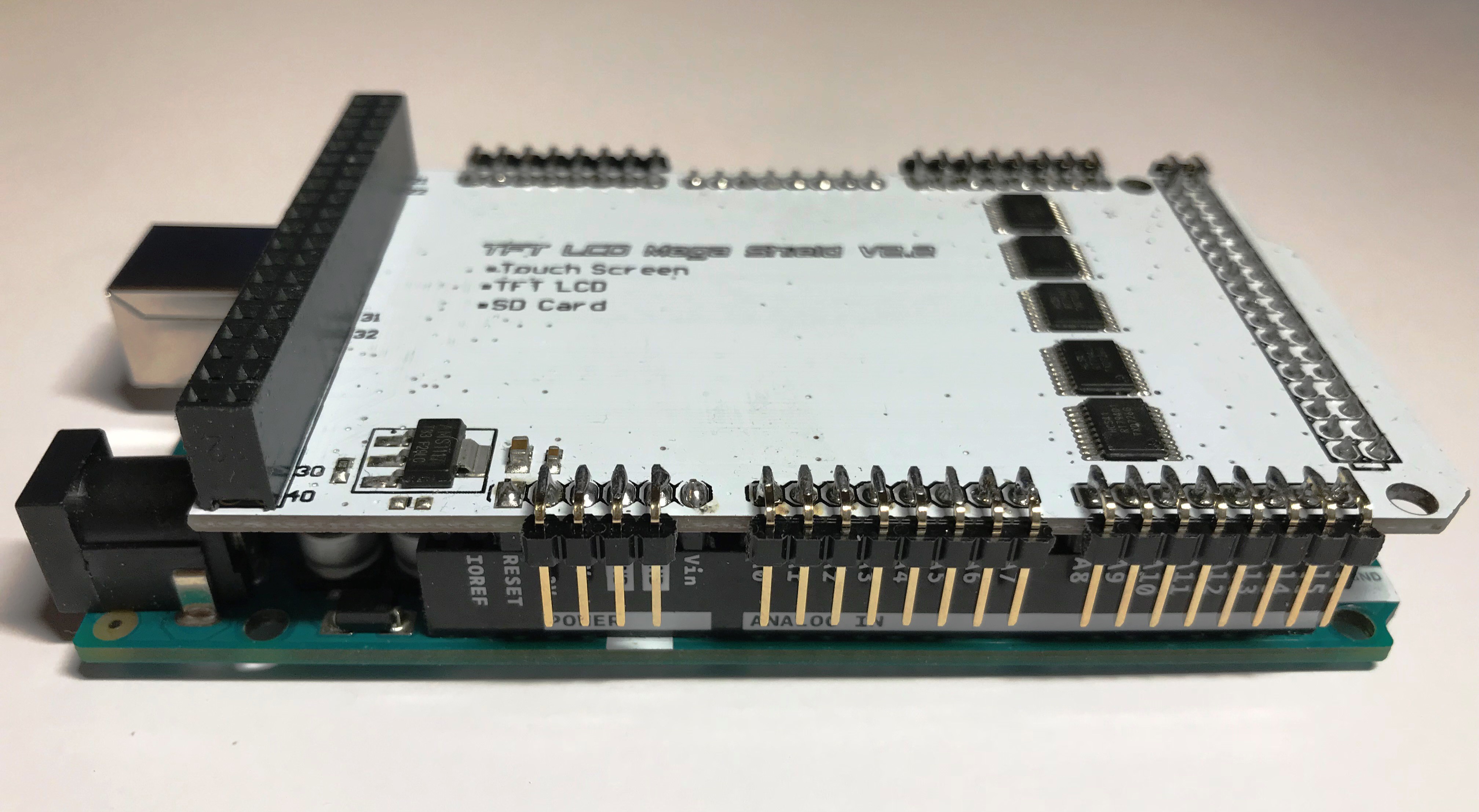
To have still access to the already occupied pins or not used pins on the Arduino Mega respectively the TFT shield I soldered angle male headers onto the according pins:![]() 3-D printed part which holds the two TTP229 capacitive sensor PCB's to form a touch keyboard:
3-D printed part which holds the two TTP229 capacitive sensor PCB's to form a touch keyboard:![]()
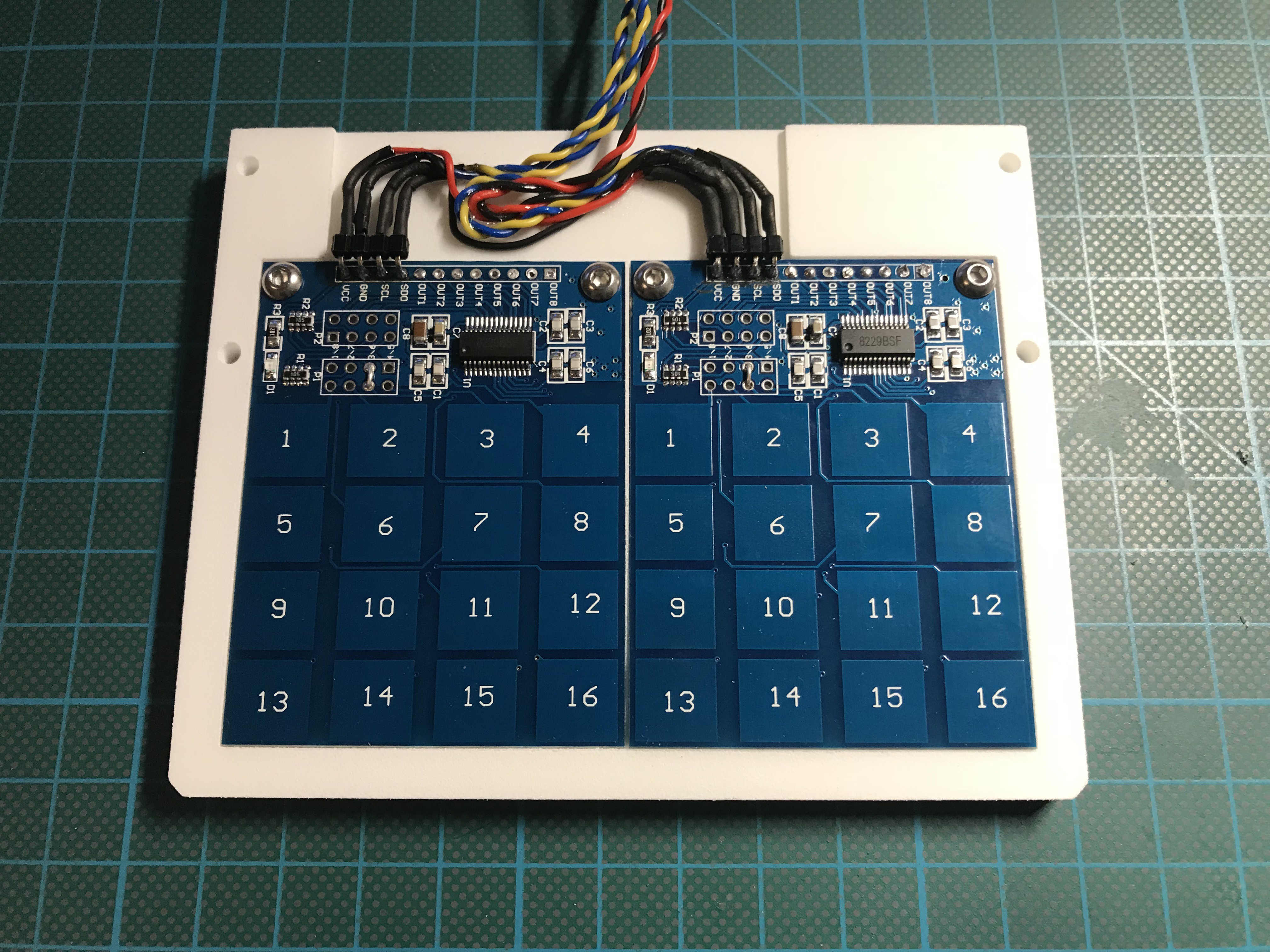
PCB's wired and mounted:
![]()
Later the two PCB's will be covered by a custom printed Lexan label done by a local printing shop and designed by myself in Inkscape, now only paper label for testing:
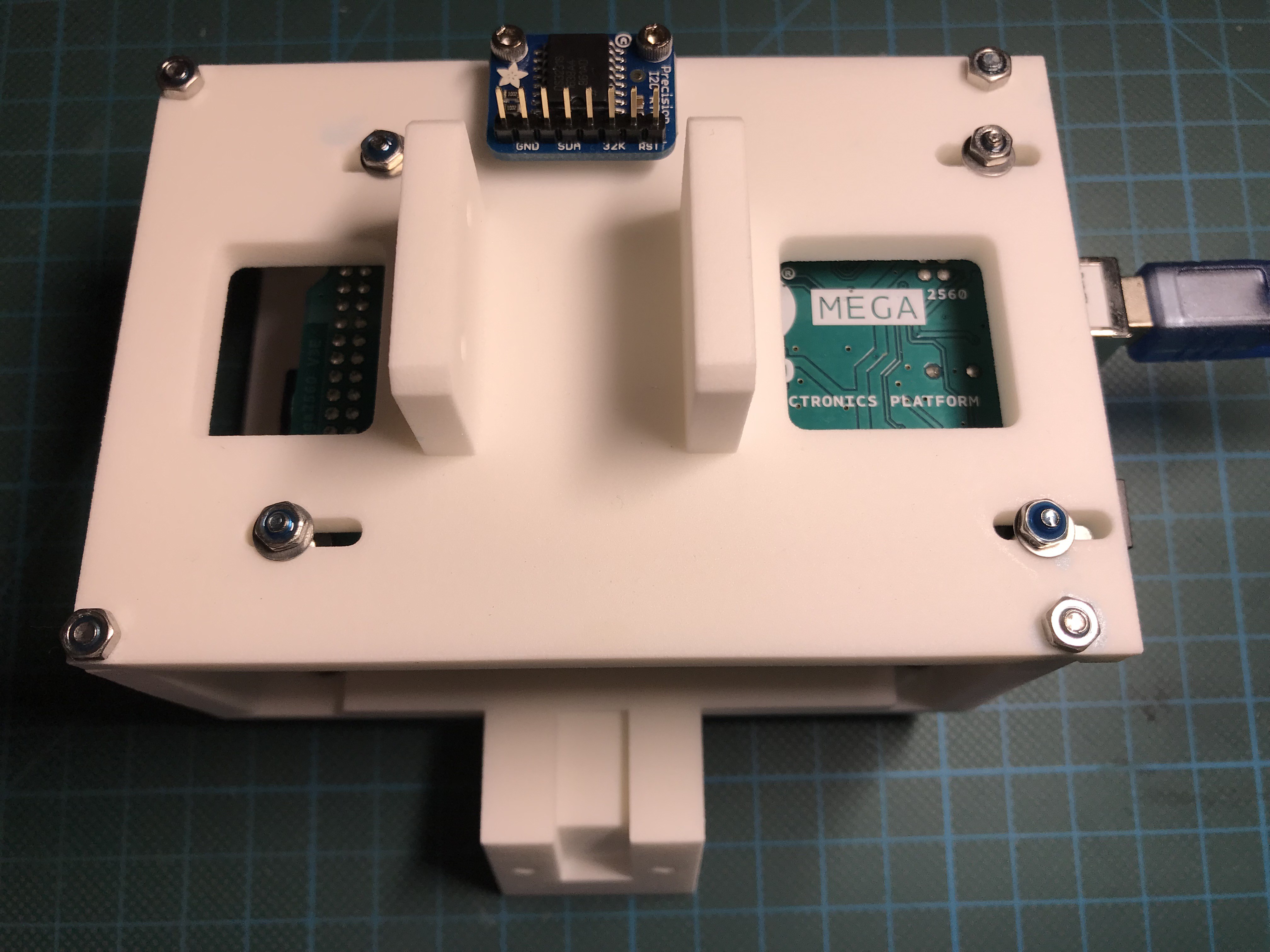
![]() Got further 3-D printed parts today and mounted TFT and Arduino Mega:
Got further 3-D printed parts today and mounted TFT and Arduino Mega:![]()
An Adafruit precision DS3231 RTC is mounted on its back:
![]() Got the labels and tested the keyboard. It works like a charm even the capacitive pads are covered by the label, which has a thickness of 0.18 mm. Really an easy and reliable solution to build a touch keyboard. If you miss haptic feedback, you can add a vibration motor or a piezo actuator underneath the PCB's or in the enclosure of the keyboard:
Got the labels and tested the keyboard. It works like a charm even the capacitive pads are covered by the label, which has a thickness of 0.18 mm. Really an easy and reliable solution to build a touch keyboard. If you miss haptic feedback, you can add a vibration motor or a piezo actuator underneath the PCB's or in the enclosure of the keyboard:![]() Finished console As you can see, I started already to squeeze out the RTC to get as much as possible information about the robots environment, using some astronomical formulas, inter alia the Gauss's Easter algorithm:
Finished console As you can see, I started already to squeeze out the RTC to get as much as possible information about the robots environment, using some astronomical formulas, inter alia the Gauss's Easter algorithm:![]()

 3-D printed part which holds the two TTP229 capacitive sensor PCB's to form a touch keyboard:
3-D printed part which holds the two TTP229 capacitive sensor PCB's to form a touch keyboard: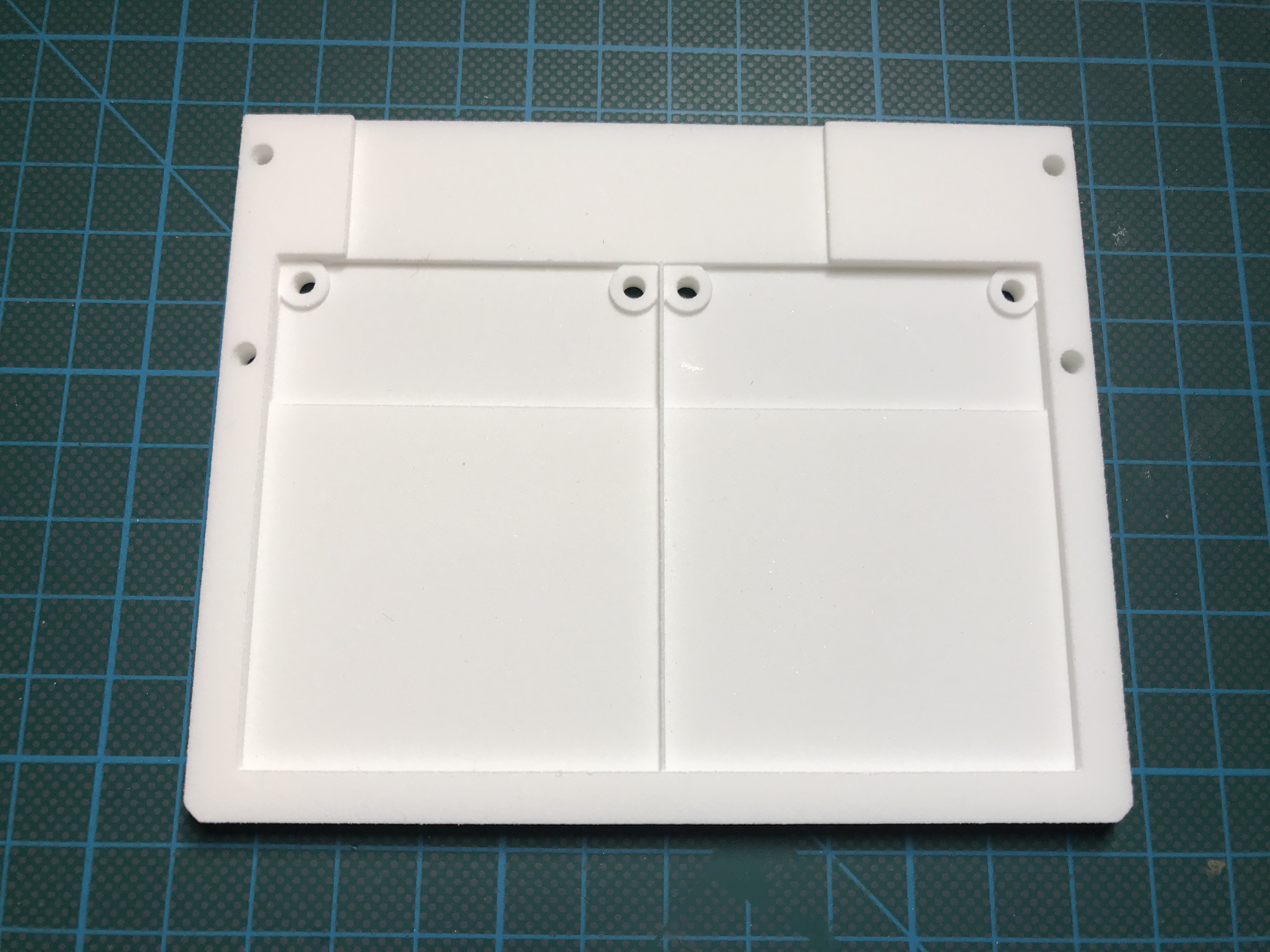
 Got further 3-D printed parts today and mounted TFT and Arduino Mega:
Got further 3-D printed parts today and mounted TFT and Arduino Mega:
 Got the labels and tested the keyboard. It works like a charm even the capacitive pads are covered by the label, which has a thickness of 0.18 mm. Really an easy and reliable solution to build a touch keyboard. If you miss haptic feedback, you can add a vibration motor or a piezo actuator underneath the PCB's or in the enclosure of the keyboard:
Got the labels and tested the keyboard. It works like a charm even the capacitive pads are covered by the label, which has a thickness of 0.18 mm. Really an easy and reliable solution to build a touch keyboard. If you miss haptic feedback, you can add a vibration motor or a piezo actuator underneath the PCB's or in the enclosure of the keyboard: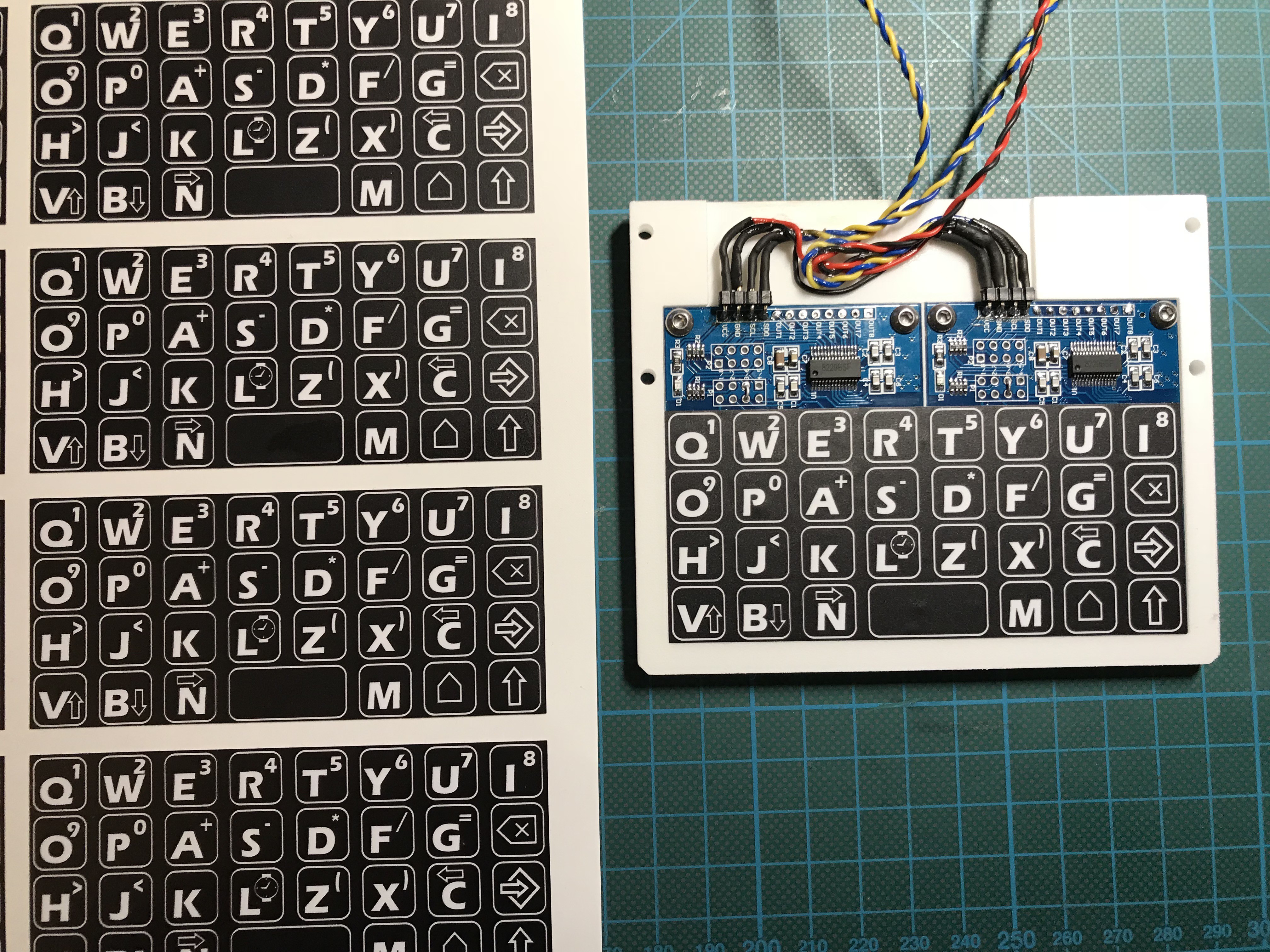 Finished console As you can see, I started already to squeeze out the RTC to get as much as possible information about the robots environment, using some astronomical formulas, inter alia the Gauss's Easter algorithm:
Finished console As you can see, I started already to squeeze out the RTC to get as much as possible information about the robots environment, using some astronomical formulas, inter alia the Gauss's Easter algorithm: