Rudolph
Rudolph-
Still going...
06/11/2015 at 07:08 • 0 commentsDeary Diary,
Yup, been a while. Project R has been largely ignored since not advancing past the quarterfinals of the last THP. Actually it's been worse than ignored, it was dismembered and some of the parts reappropriated. That's okay though because the project has always been tumbling about in the back of my mind.
About a month ago I started really noodling over having another go at Ruprecht. As I've mentioned in other places, I realized that last time I was building Ruprecht for the wrong reasons, and that this time I should build things for myself, not for what I (likely mistakenly) think someone would want to see for a contest entry (imagine that). So I pulled out the box o' remaining parts (which is most of them) and started fiddling again.
The same basic premise of Project R still applies. A small, low-budget research type of robot to play with machine vision, mapping (SLAM), and whatever else gets "researched" with a Linux-running, webcammed, internetted robot. Ruprecht will still be about the same size as before too, sitting atop the old RP-5 chassis. It will be a bit lower profile though as I've re-thunk how I want to do the arms and head. I guess I need to dig out the crayons and whip up a new CAD rendering. Although I'll likely have the chassis up and running to take a real photo of before I get the attitude to locate the art supplies.
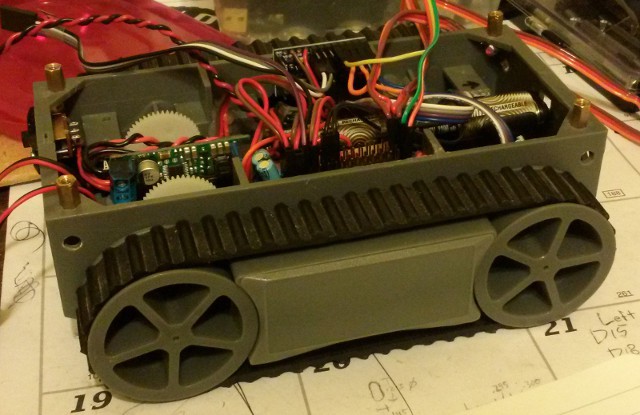
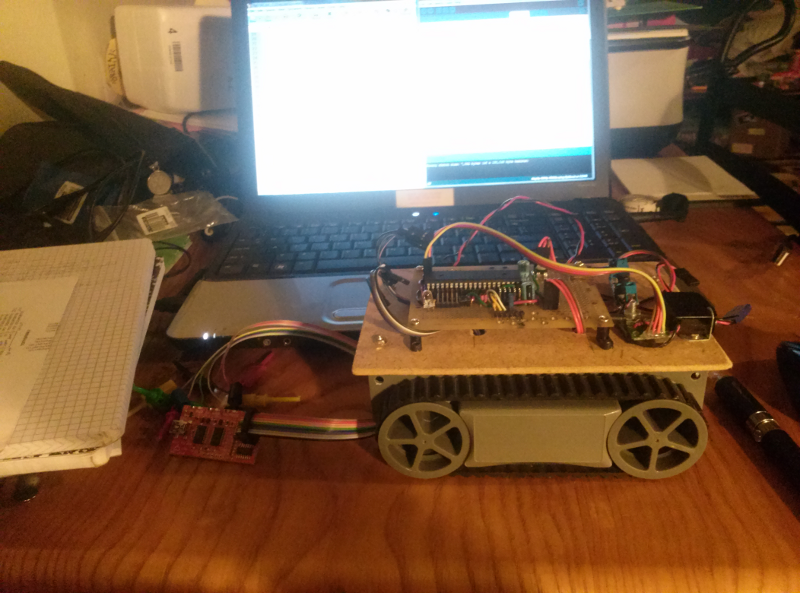
In fact, I had intended to sit down and start writing some code for the chassis, and while looking back on what came before I got sidetracked on HaD dot io and ended up writing this instead. So here's a quick snap of the current state of things.
Amazing, eh? Gone is the ATMega1284 board to run the chassis. It's been replaced by a knockoff pro mini. Doing this let me remove one (of two) chassis decks from the original design. It still uses two DRV8833 drivers, one for each track motor. And it's set up for a pan-tilt head with a Maxbotix EZ1 ultrasonic sensor (and a webcam, but the pro mini doesn't care about that). When I get the chassis code going it'll be a basic differential drive obstacle avoiding robot, ready for a Beaglebone to be strapped to its back.![]()
This post is getting longer than intended, so I'll get one more point out and get back to work. This year's THP states "Build something that matters." I was thinking that over and decided that not only will Ruprecht solve the problem of nerf darts laying all over the house, it'll also play a pivotal role in my (previously mentioned, top-secret) dastardly plans to take over the world. If that isn't something that matters, I don't know what is. The Rules say that last THP semifinalist projects aren't eligible. Since Ruprecht went out at quarterfinals, I guess that means I can enter again. So, I'm re-entering Project R to The Hackaday Prize. What's the worst that can happen, right? :-)
-
20140818
08/19/2014 at 05:43 • 0 commentsDear Diary,
Things are hectic around here. We're in the process of moving to a house, so between finding time, and remembering which box has tools and which has parts, it's been rather difficult to work on Ruprecht. Next week will be a lot easier though. While I won't be able to properly test the "apartment friendly" aspect of of this build I will finally have a garage and lots o' space to work in. Exciting stuff.
It also became painfully apparent that I hadn't yet made the required video for proper entry consideration for TheHackadayPrize. Oops... So this evening I grabbed the camera and shot a (rather crappy) video.
At least I got it done in time. Whew!
-
20140806
08/07/2014 at 01:26 • 0 commentsDear Diary,
Well, still no new code... I'm truly sorry. I feel terrible. Really. I promise I'll try to make more of an effort this week to get some done.
It's hard though. There are just so many fun things to play with on the hardware side of things that it's difficult to want to sit down with the lappy and actually think. Fiddling and building is so much more entertaining.
Not to mention the fact that dear old Radio Shack is having a sale right now. Yup. Everything that's already marked "clearance" is an additional 25% off that(!)
So, gone is the idea of using the 4x20 character LCD, instead there's a nice, shiny, new (old, discontinued) SeeedStudio touchscreen LCD. For $11. Yup, eleven. Well, eleven and sixty cents. Still.
Oh, and the bluetooth module and knockoff arduino pro minis showed up from China today. So there's more stuff.
Plus the new pile of hard parts to futz with arm construction. And getting that was a hoot. I finally found the tubes I was looking for on the plumbing repair aisle at Lowes. I guess I was taking too long looking at stuff, the guy that works that area finally asked if I needed any help finding something. I said "No, I'm just trying to invent robot parts." He stared blankly for a couple seconds and then walked away. Funny stuff.
Anyway, here's a quick pic of some of the new bits (there are actually 5 'duino clones, one for kiddo.) (Speaking of kiddo, he got the netduino starter kit at RS, for $15, and a propeller quickstart board for $6. Good stuff.)
![]()
Okay, now it's time to cook dinner. Then maybe I'll try to devote some time to writing.
-
20140801
08/01/2014 at 08:02 • 0 commentsDear Diary,
Well, I still haven't managed to convince myself to work on the code any further... It's kinda hard to get into a coding state of mind sometimes, especially when there are parts to buy and things to be built.
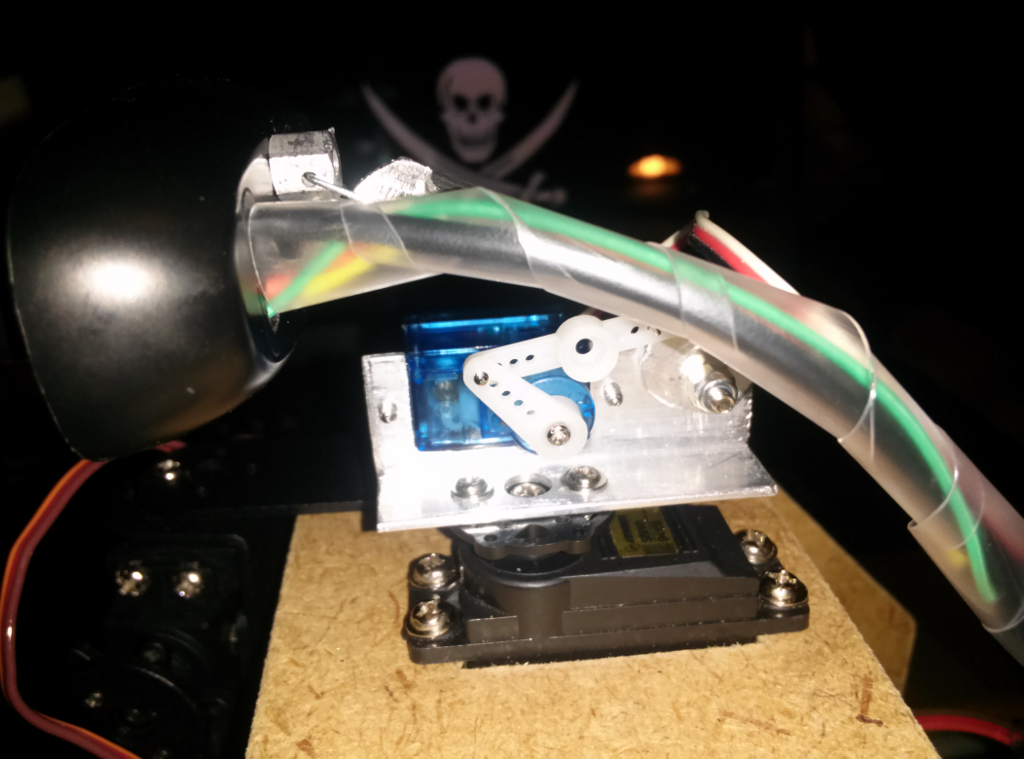
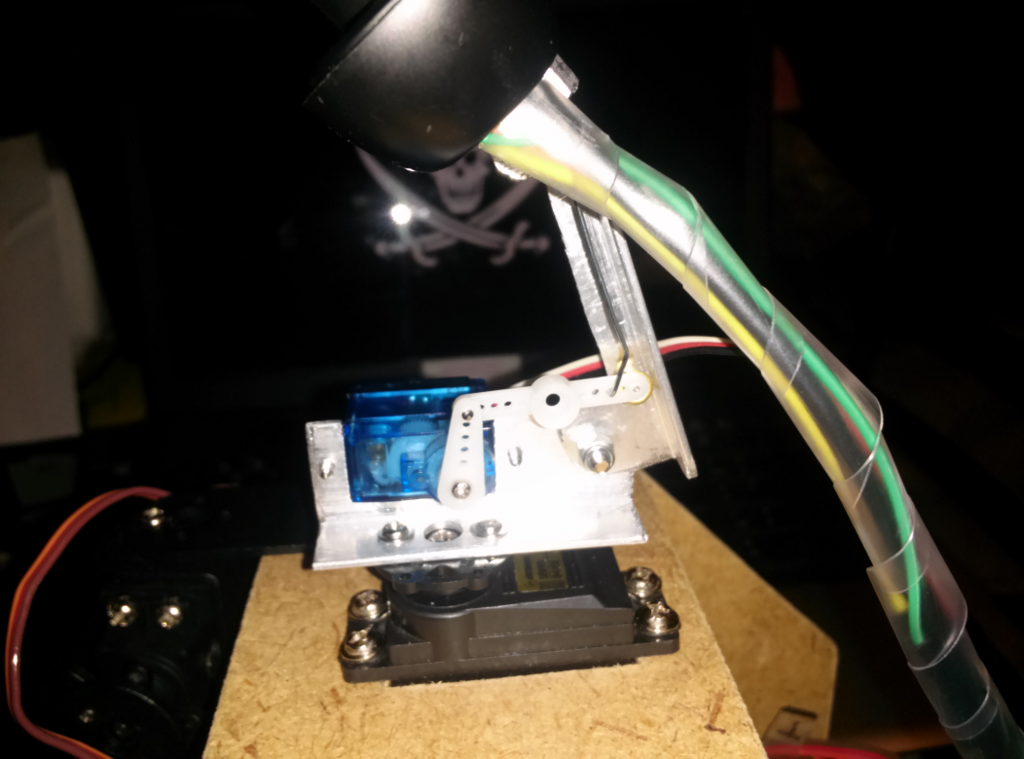
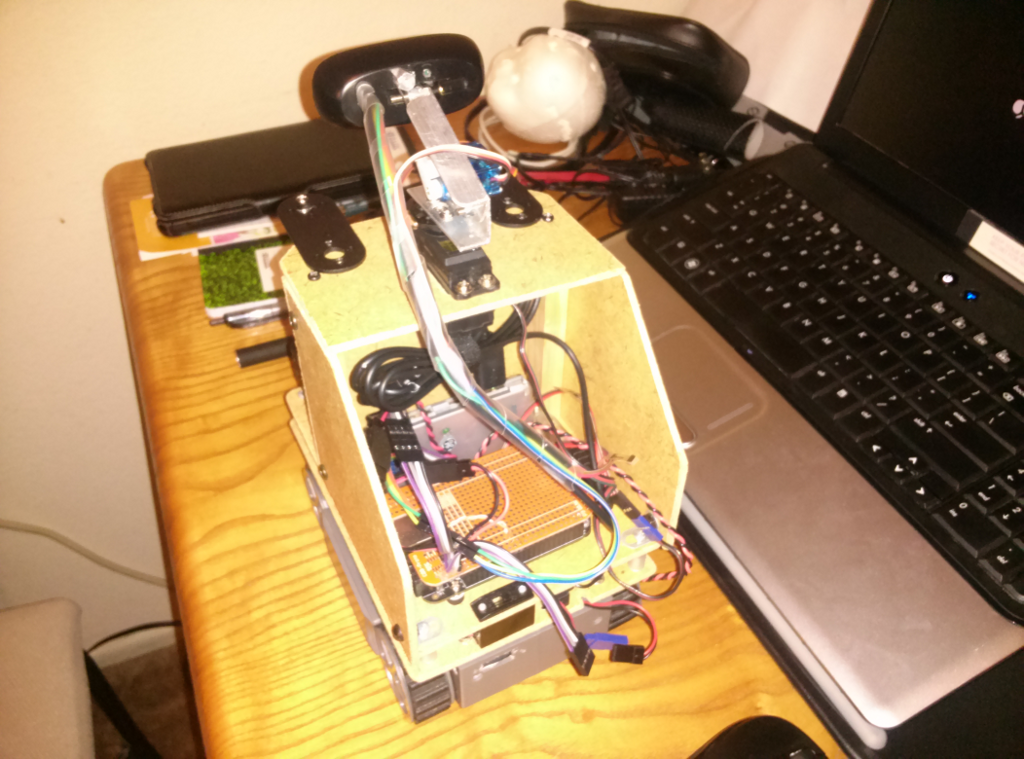
So, on that note, I did get some more things made for R(rrr). Since the last update I finally built more of a body/housing/thing which doubles as the upper support for the arms and keeps the mess o' proto-wires contained somewhat. I've also decided on the beginnings of an arm design. So far it's just the three DOF of the shoulder, but I'll add a few more in the coming days (especially since the boss approved another metal-geared servo order!). The head has come together as well, and there was just enough space inside the webcam (a Logitech C310) to drill/hack/slash a big hole in and wedge an EZ-1 ultrasonic sensor in there. Finally, I hacked together a pan/tilt neck mechanism out of a couple pieces of 1/2" x 3/4" aluminum angle (from Lowes) and a couple servos. After pulling the monitor mount clip off the logitech I was able to use the molded in pivot to bolt it to the neck. I don't have much of a selection of pushrods or connectors around here, so I ended up using another servo horn and a paperclip to make the linkages. The photos I have don't show it well, but the linkage pivots the webcam a bit as it lifts the neck. The way it works out kinda gives R's face a bit more personality than just a camera tilting up and down.
I'll end this with a few photos that show how Ruprecht looks hanging out on the table. Hopefully I'll get the building itch simmered down a bit and actually get to some coding shortly.
![]()
![]()
![]()
![]()
I could've sworn I made a post last week showing the lower profile '1284 deck, but I guess I just never did it. I can't even find the photos I thought I took. Weird. I'll snap some pics of it next time I take the decks apart (which seems to happen more often than I'd like).
-
20140719
07/19/2014 at 07:50 • 0 commentsDear Diary,
Not a lot to report, I've been away from ye olde robot lab (aka the closet in which I keep my stuff) while house-sitting. Fortunately I've been able to spend some of this downtime researching ROS. Now I'll at least have a clue what I'm looking at if I decide to try to make it work on the BBB (on Debian, so it may be tricksy).
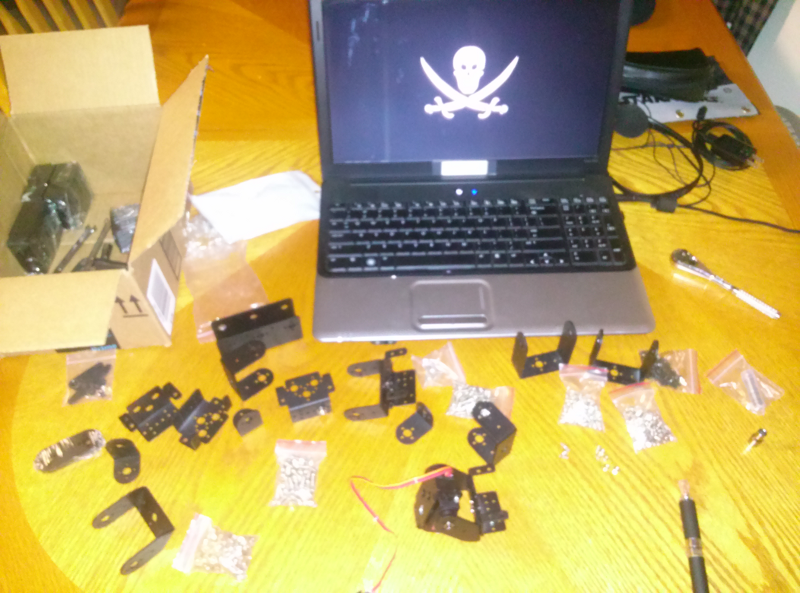
I've been trying to figure out an intelligent yet low budget way of building a 5 to 7 DOF manipulator arm. And if that wasn't difficult enough, I actually need two of them (in order to have Ruprecht properly help carry out my world domination plans). After drooling over the premade servo brackets at LynxMotion for a while I finally hit up the wife to let me acquire some knockoff versions in greater bulk. "See dear, I'd need at least $75 worth of bits from here, but this whole kit with three times that many only costs $86!" Interestingly enough, she consented.
![]()
After sneaking a half dozen metal geared servos onto the order I think I may have enough bits to pull off something close to what I'm imagining. Shiny.
This weekend I need to re-lower-profile-motize the '1284 deck (I decided I didn't like its height after the last post) then I'll get the BBB deck on and start building me some arms.
-
20140713
07/14/2014 at 04:17 • 2 commentsDear Diary,
It's been rather slow going these past couple weeks. It has been quite some time since I last did anything robotic-ey, and it shows. My code is rusty at best. I've thrown away 5 times what I've kept... Still, I have some things working, including my first ever attempt at I2C stuff (tested with a Bus Pirate). As proof I offer the following photograph:
![]()
See? Bus Pirate! Woohoo! Everything is awesome!
Seriously though, that ATMega1284 on there successfully received test commands over I2C and wrote the appropriate debug text to the serial monitor. Hey, don't laugh, I was stoked! I also pounded a bit of "git for the compleat idiot" into my head and have successfully pushed my Arduino code to my GitHub account.
Next up: some standoffs and the second deck to hold the BeagleBoneBlack so I can dust off my Python... um... skills... and get this thing driving.
-
20140627
06/28/2014 at 07:07 • 0 commentsDear Diary,
Progress is actually happening with Project R(rrr). Today was spent cursing wheel encoders that seemed to work in the past but didn't want to any longer. They're finally whipped into shape and the chassis is looking something like a real robot. I can now start laying down some code to perform a chassis test.
There has been a slight change in plans -- there will no longer be a separate mini brain for the chassis and head. Instead the chassis mini brain will be an ATMega1284 which will also handle the tasks for the head. Since the head was only going to be a couple servos and an ultrasonic distance sensor (well, maybe also an IR ranger)(oh, and a laser) I don't see any reason to run yet another micro (the webcam functions are handled by the main brain anyway). I still think it'll make sense in the long run to leave each arm with its own mini brain.
You may also notice I finally uploaded a rendering of the finished project, utilizing the latest in CAD technology (you know, Crayola Aided Drafting).
Project R
Project R(rrrr) is a low-budget research robot for the rest of us.