-
1Inverse Kinematics
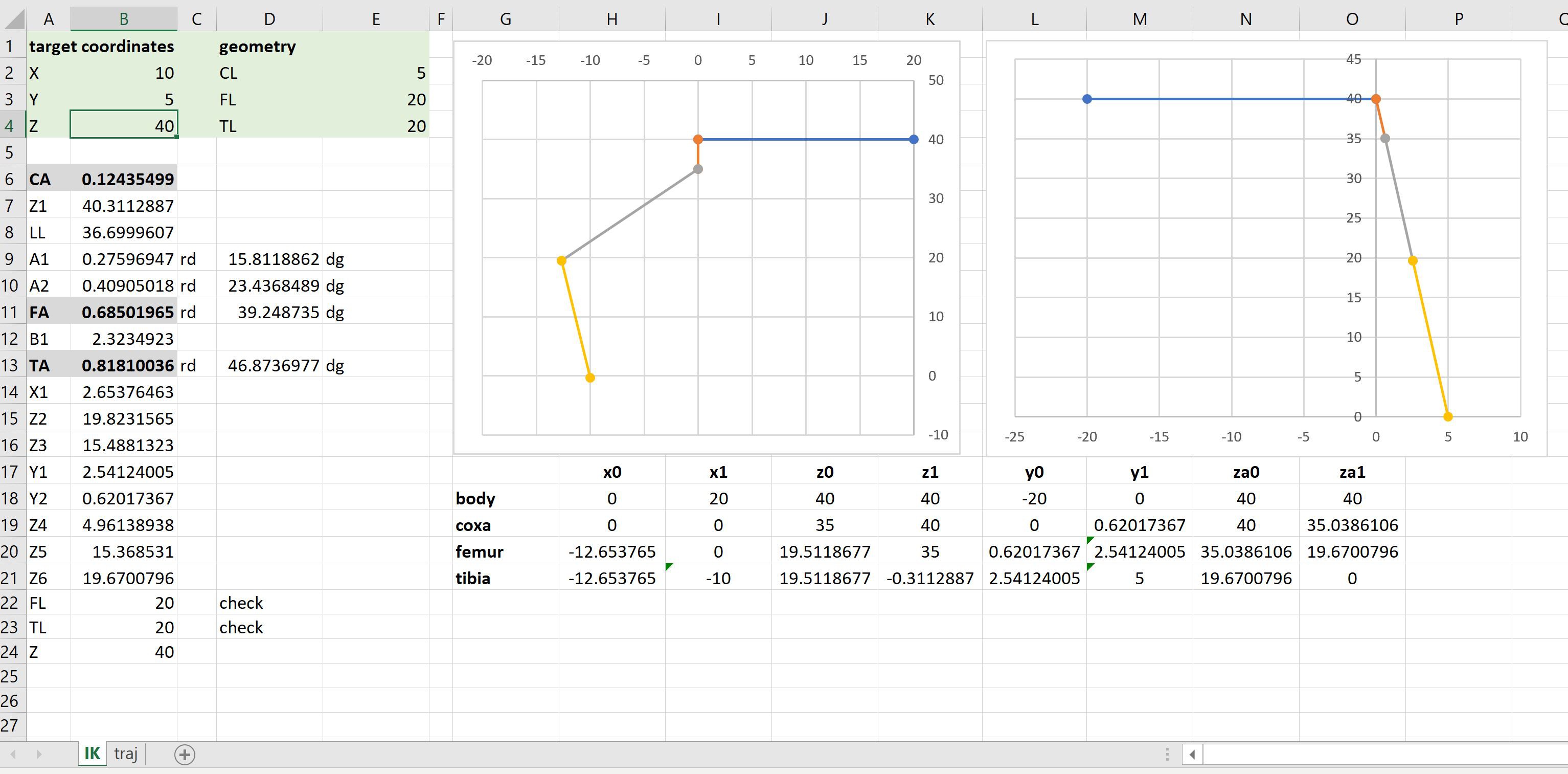
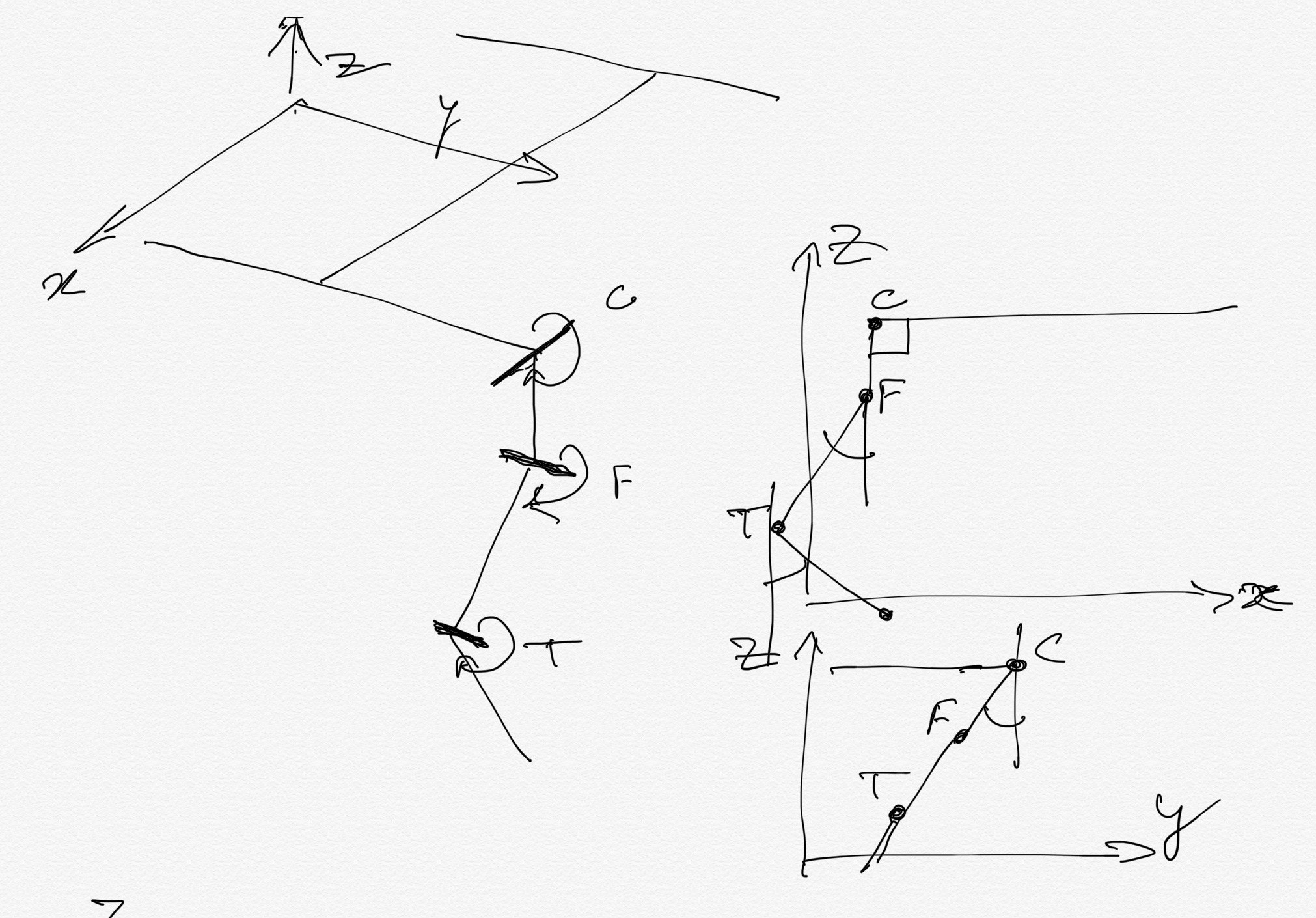
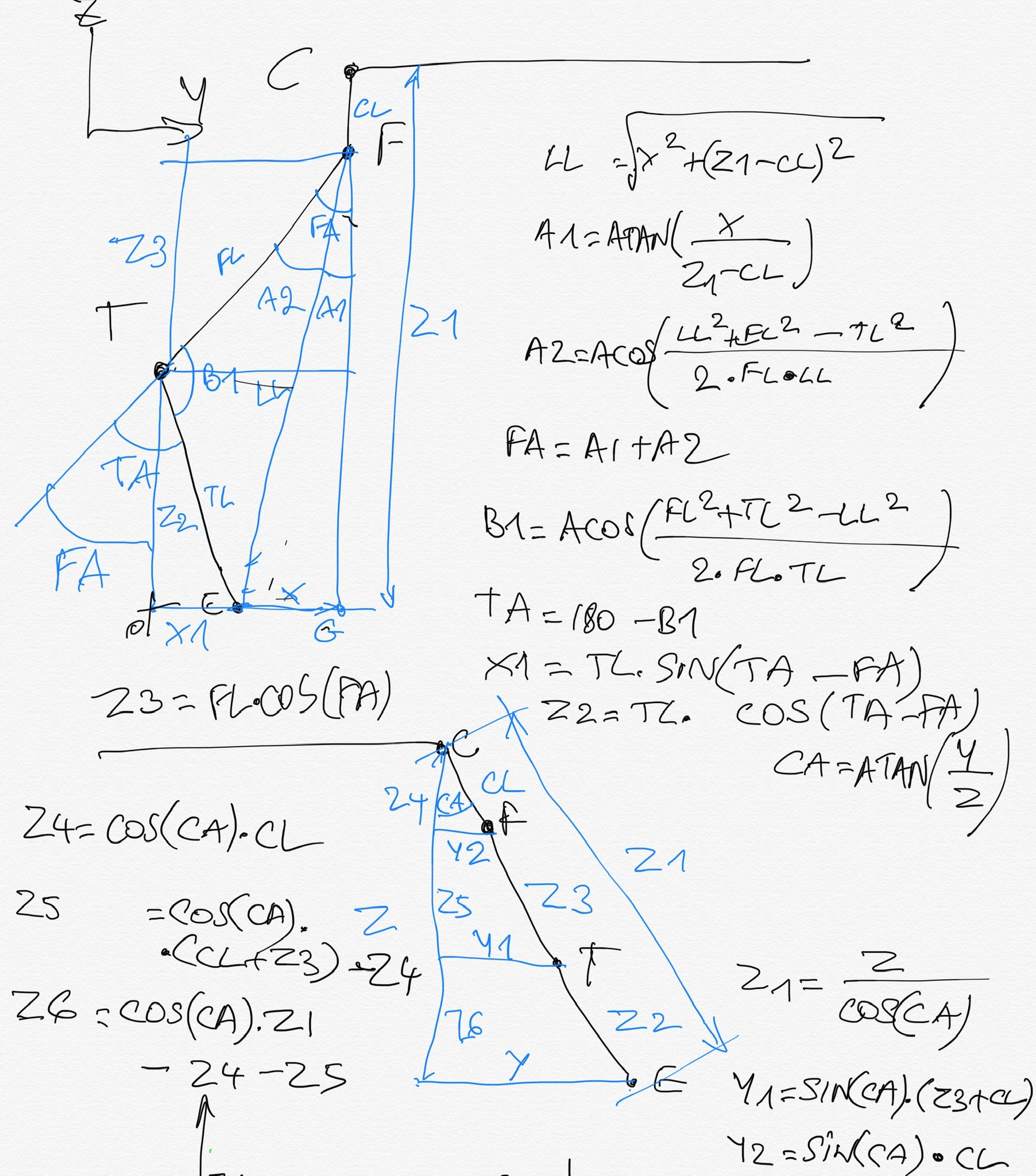
Below the basic computation I used. As I am not sure if / how I can convert that into a clean document, I preferred to attach screen copies of the notes I took, hopefully you will find that useful.
I attached the excel file I used to test the computation before implementing it and draw a schematic view of a leg.
![]()
![]()
![]()
![]()
-
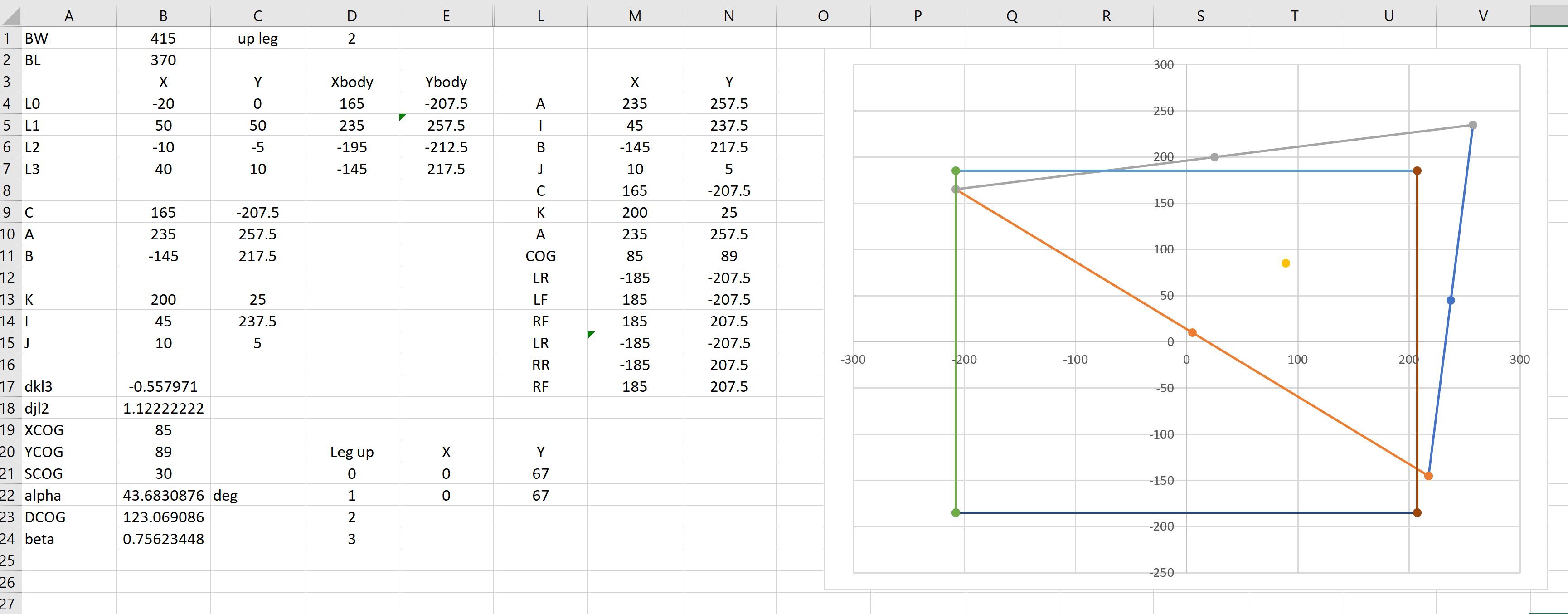
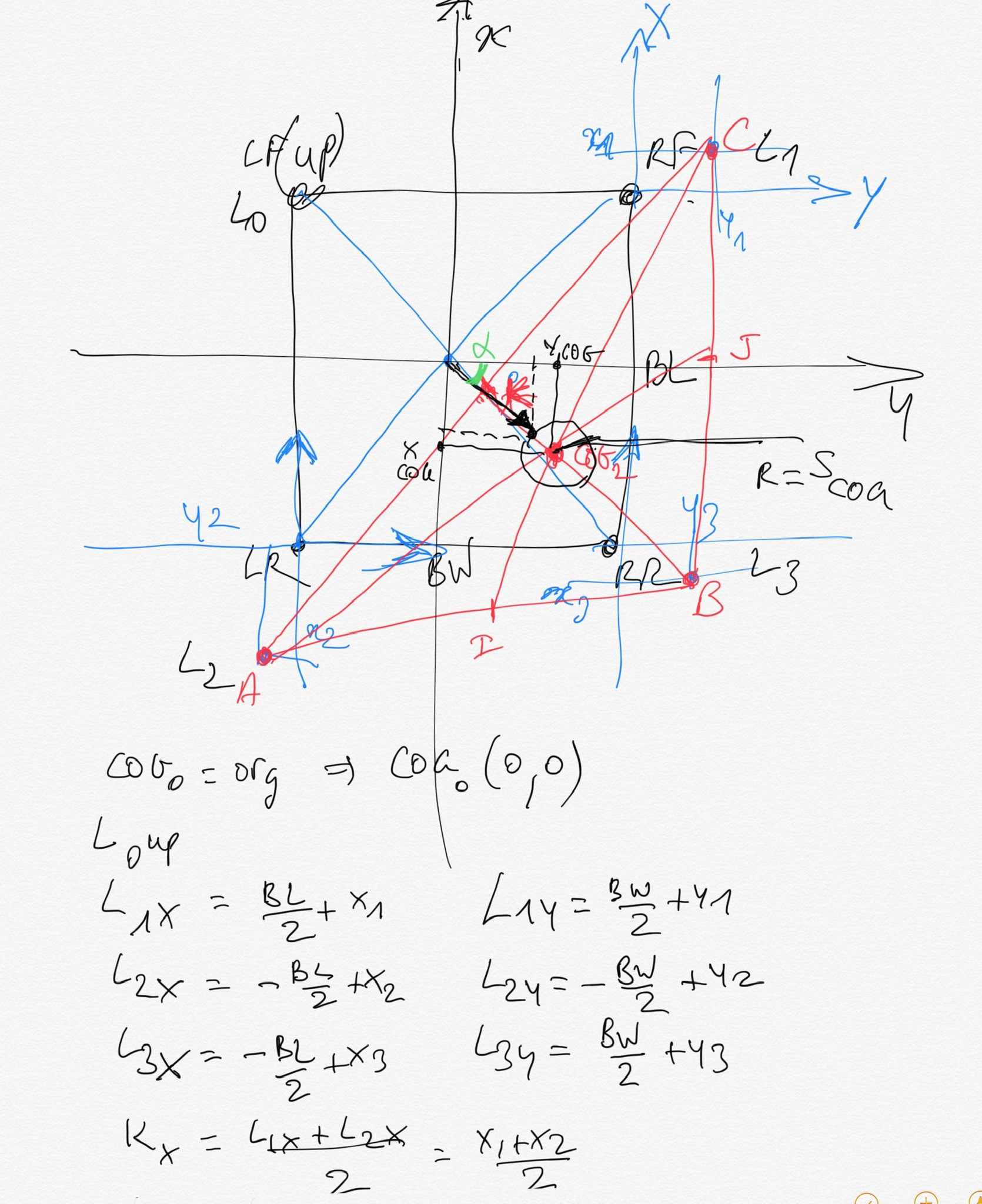
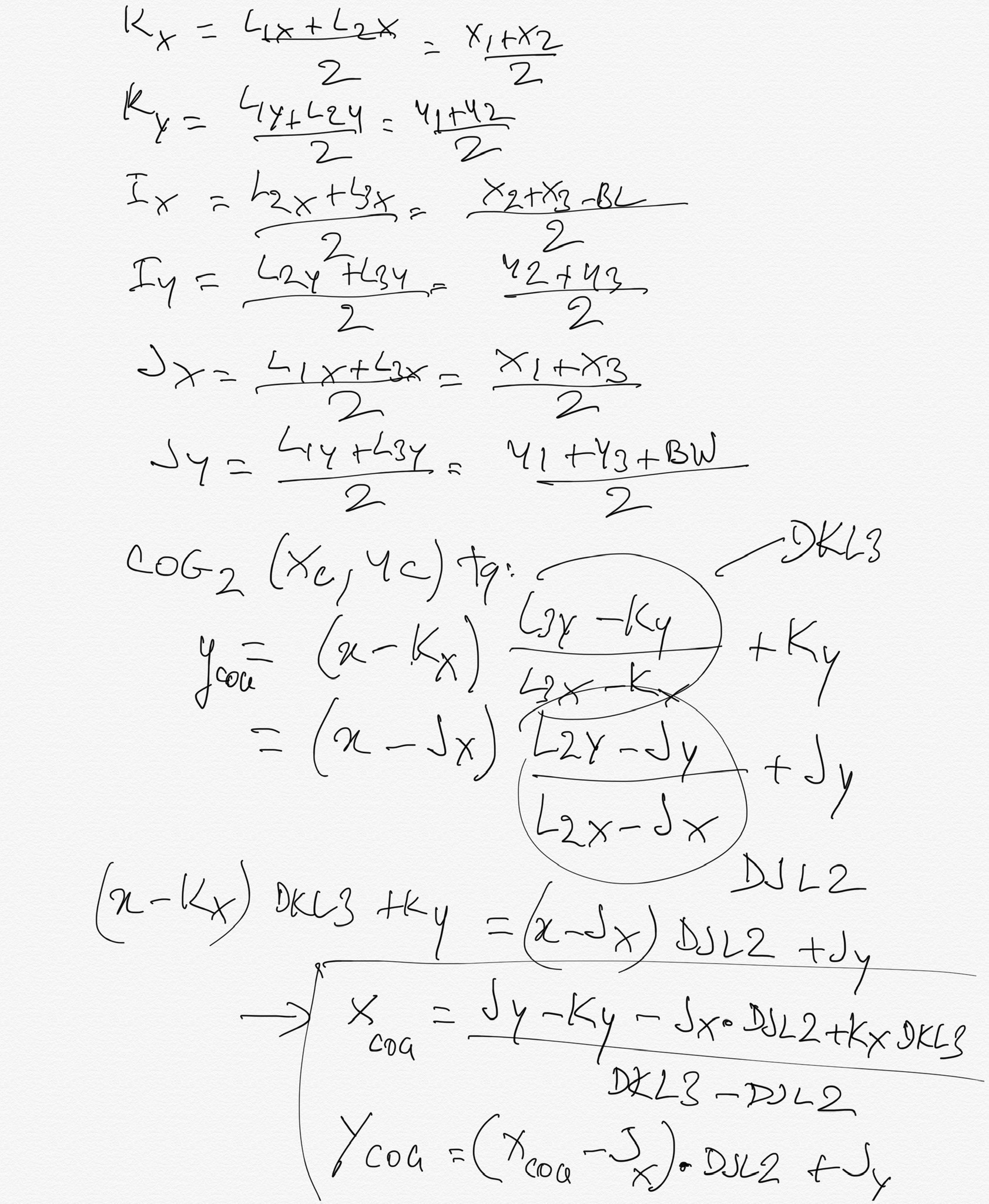
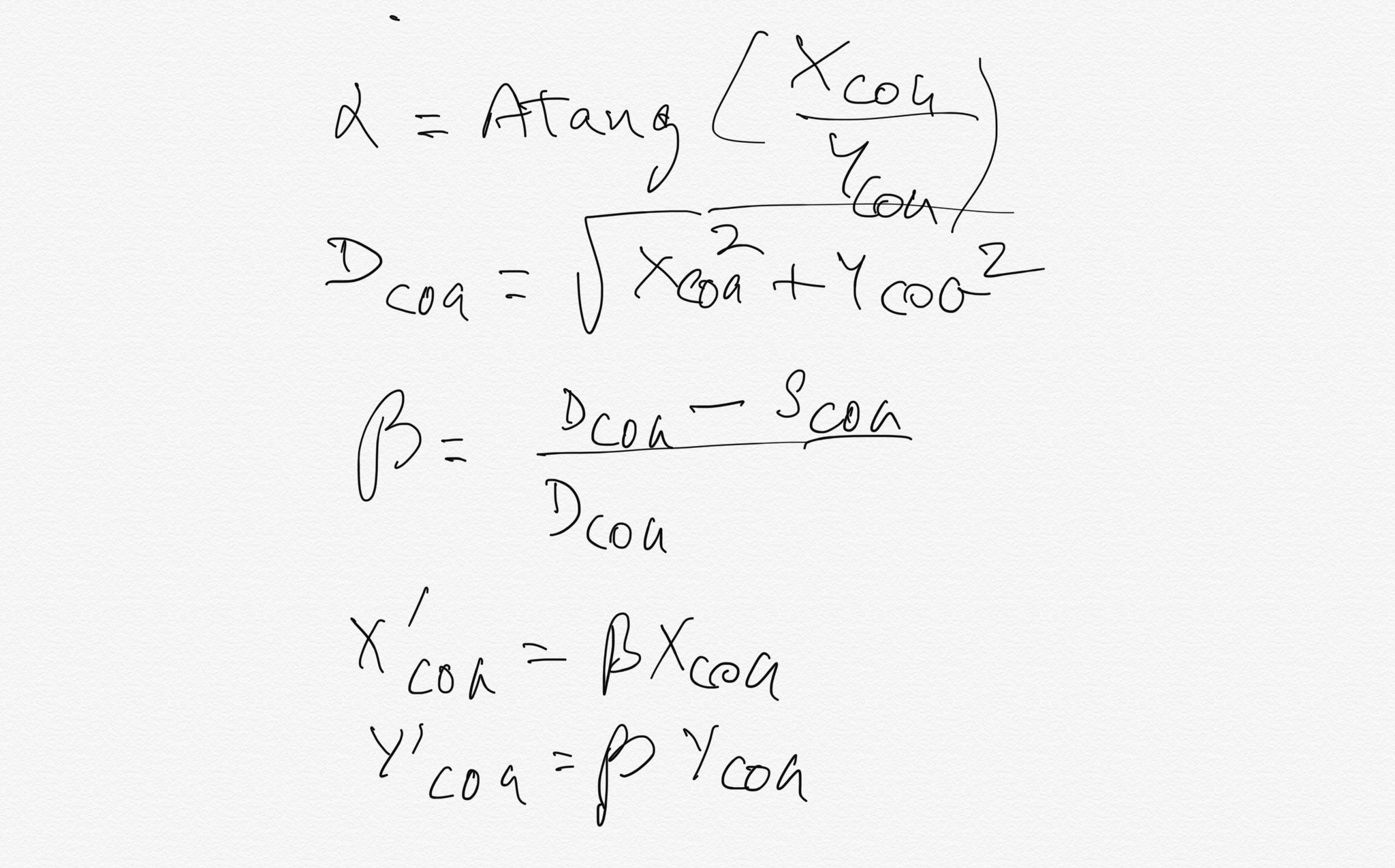
2COG (Center of Gravity)
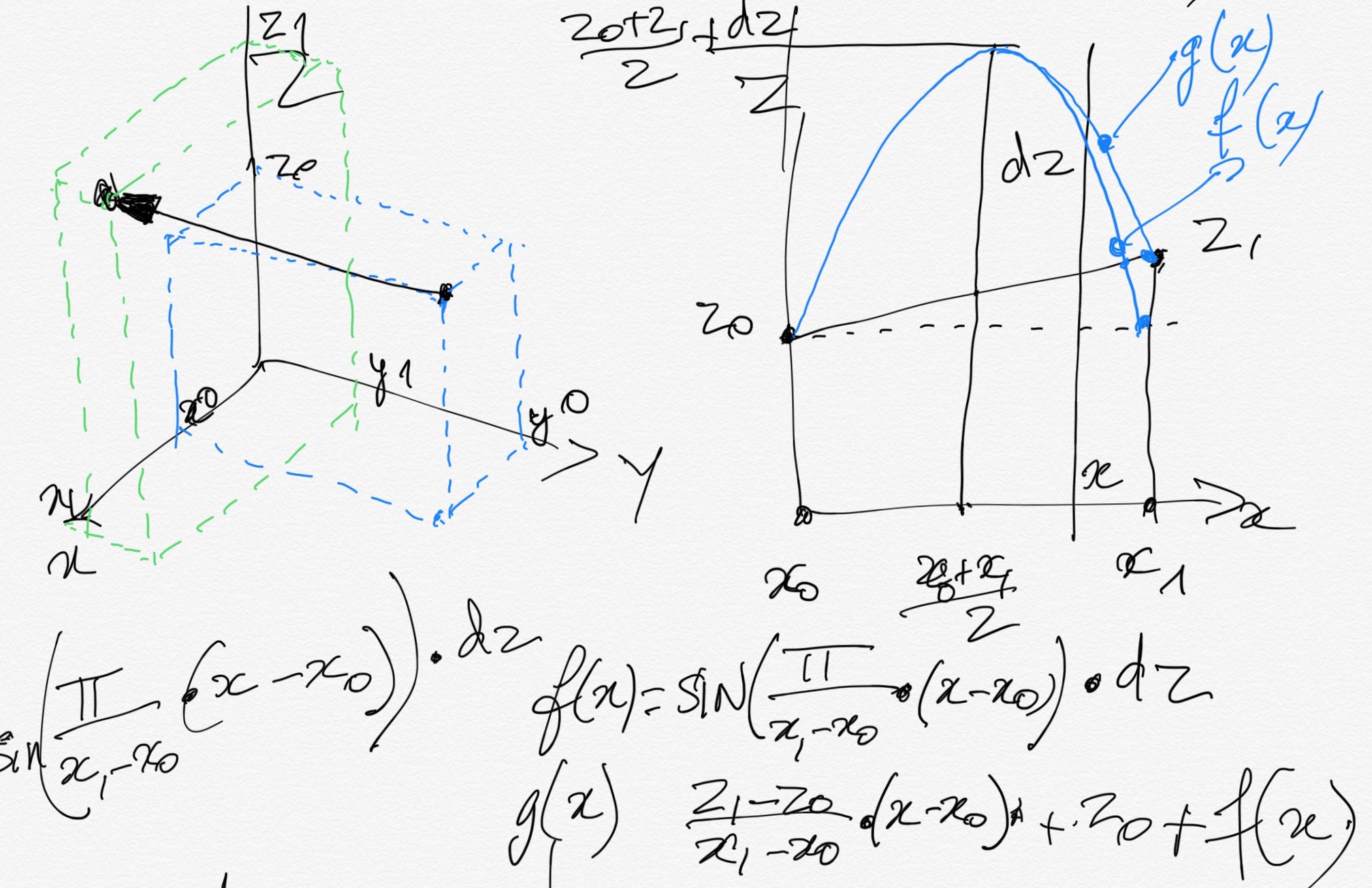
The below determines the COG location desired before a given leg can be lifted.
Also below the excel file I used to draw the COG position based on this mdel.
![]()
![]()
![]()
![]()
RAP an autonomous quadruped robot
RAP is aimed at developing from scratch - ie no ROS - the HW and SW of a four-leg robot with sensors enabling an autonomous walk.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.