 RobsonCouto
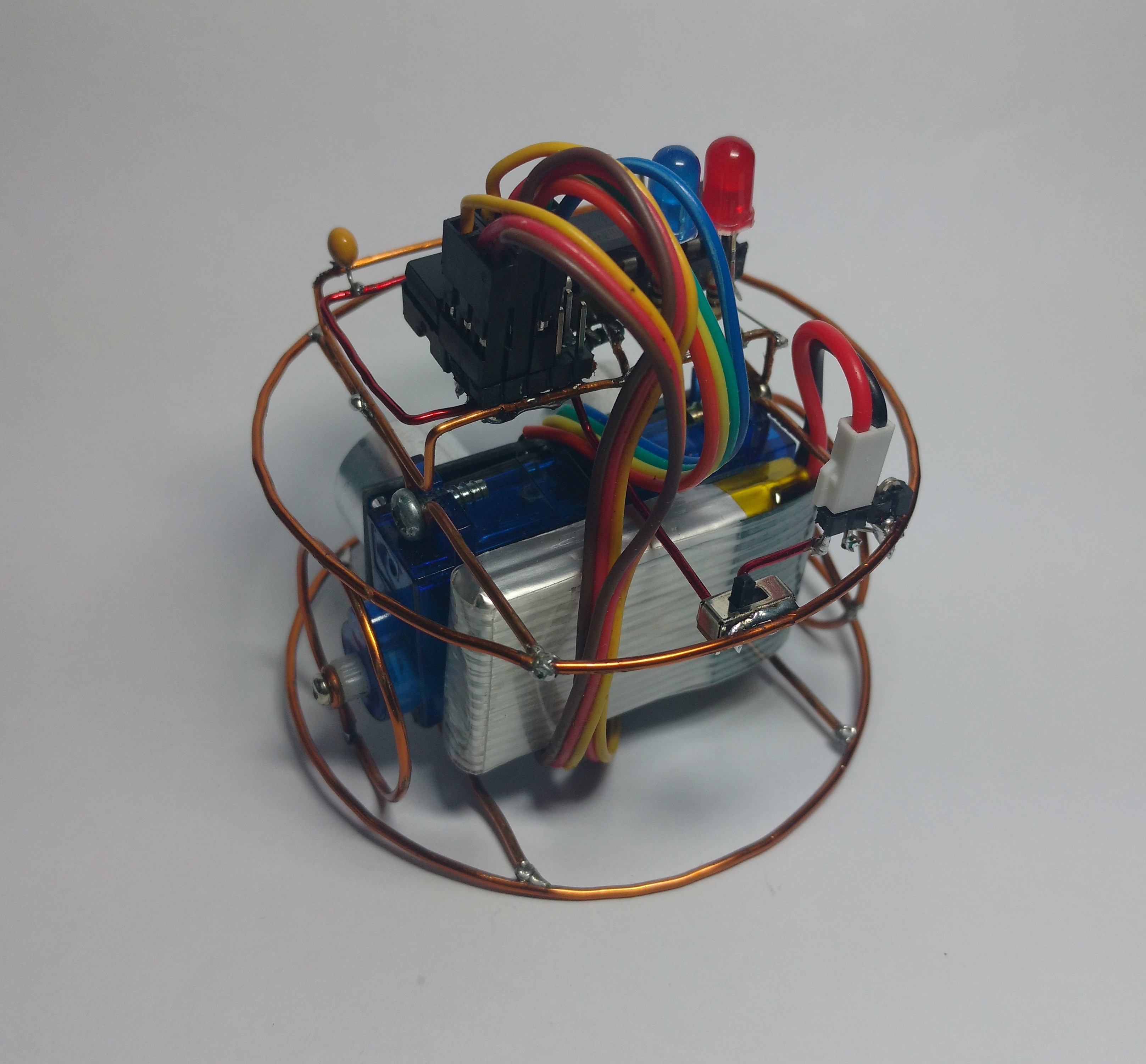
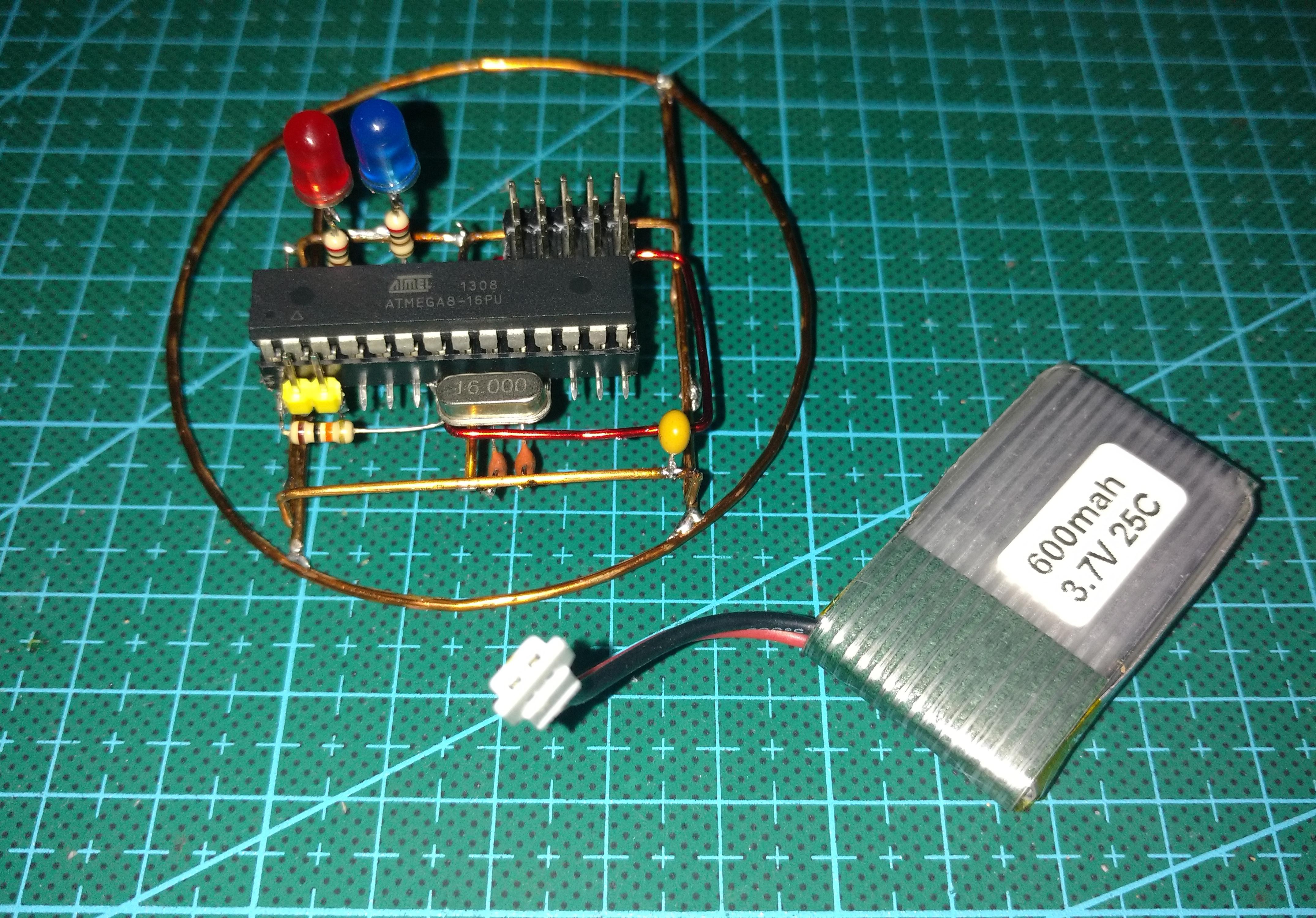
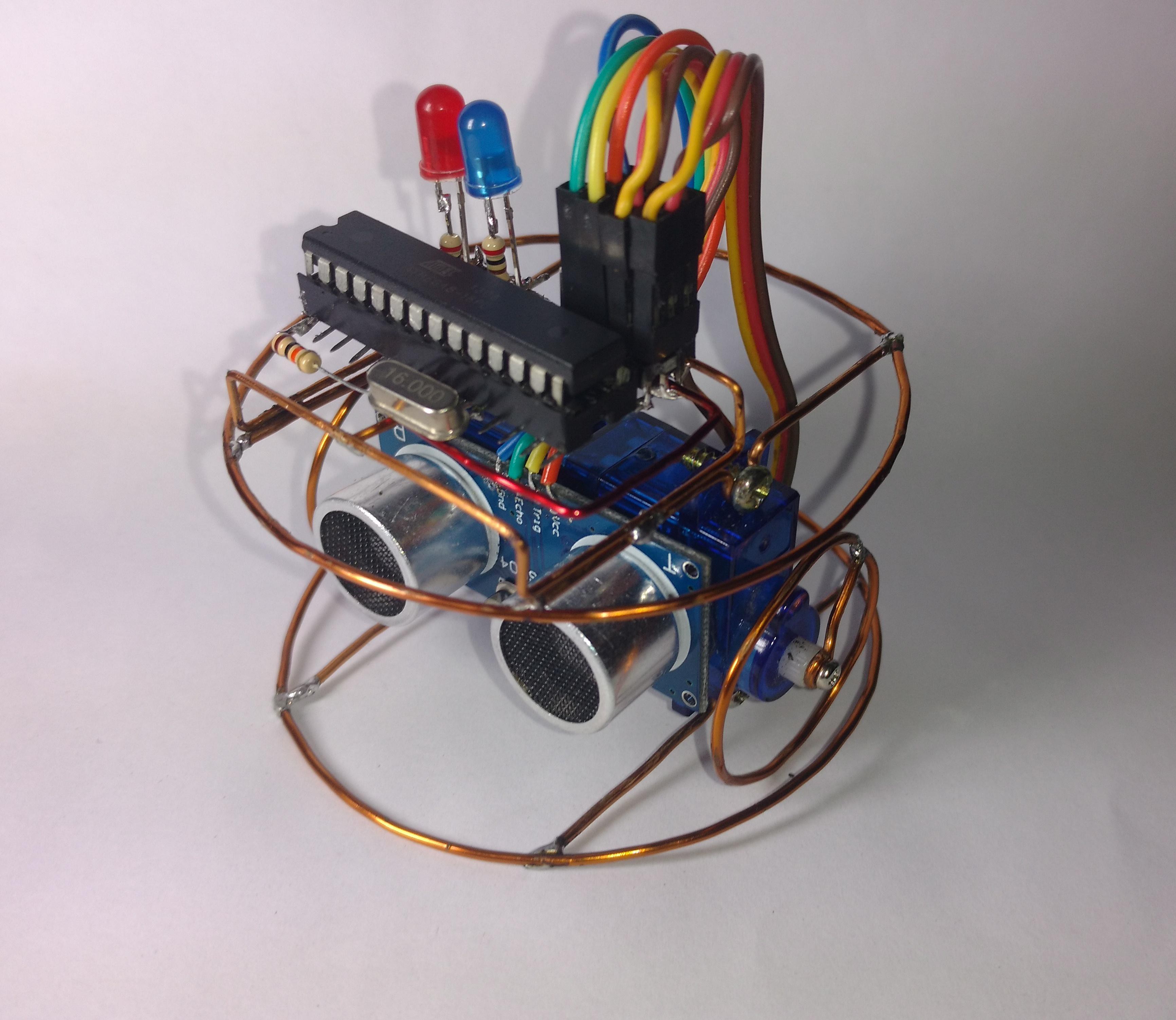
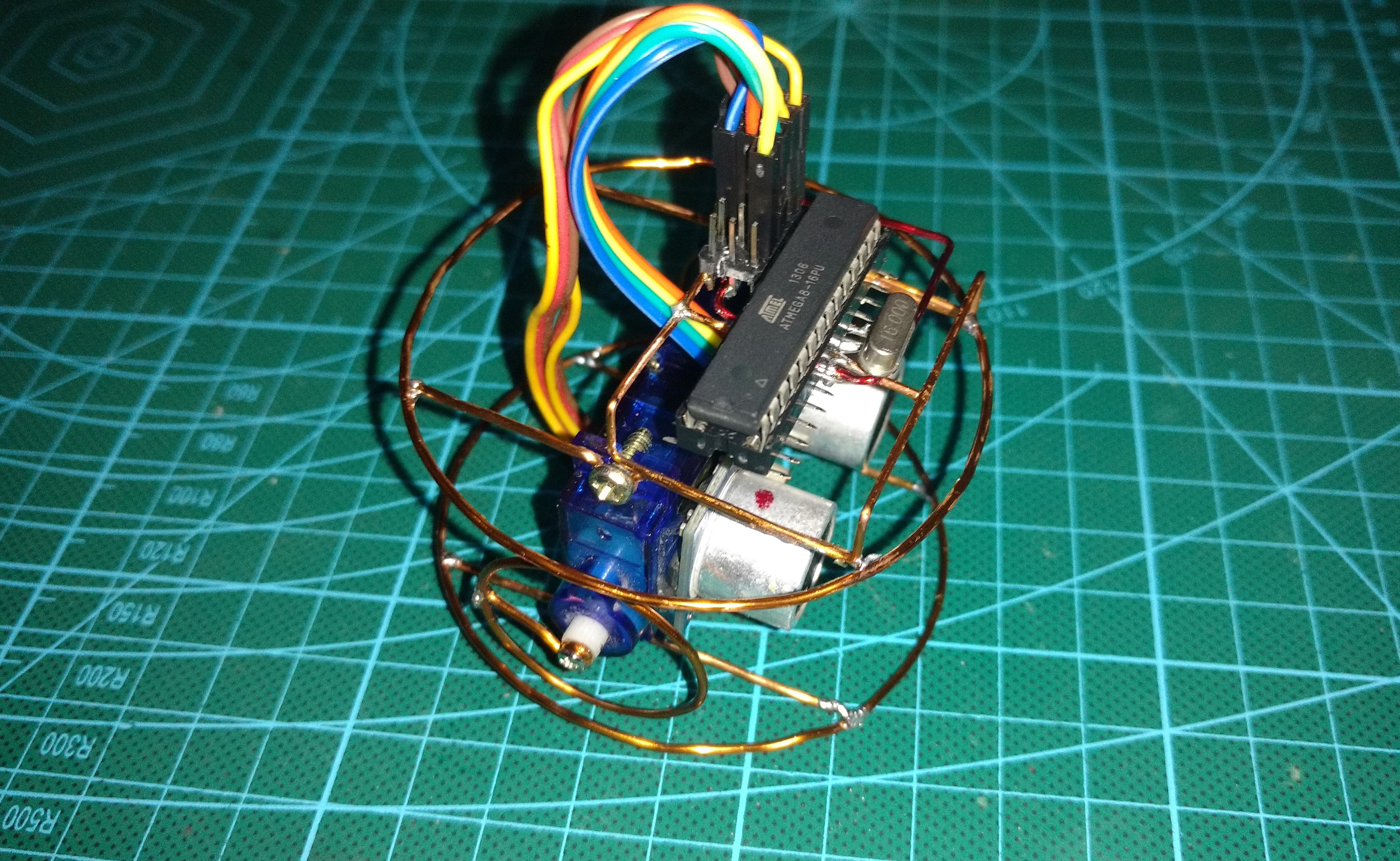
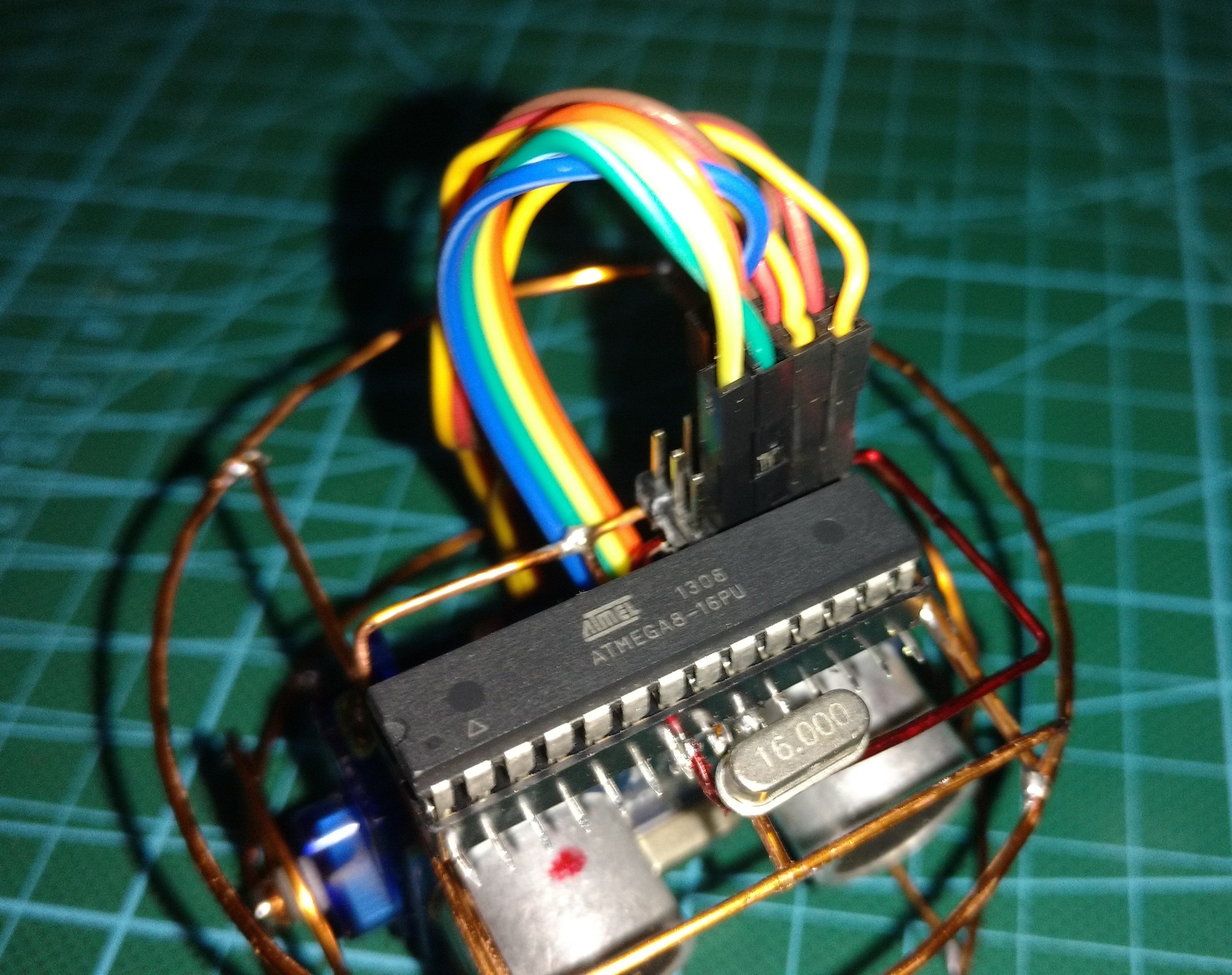
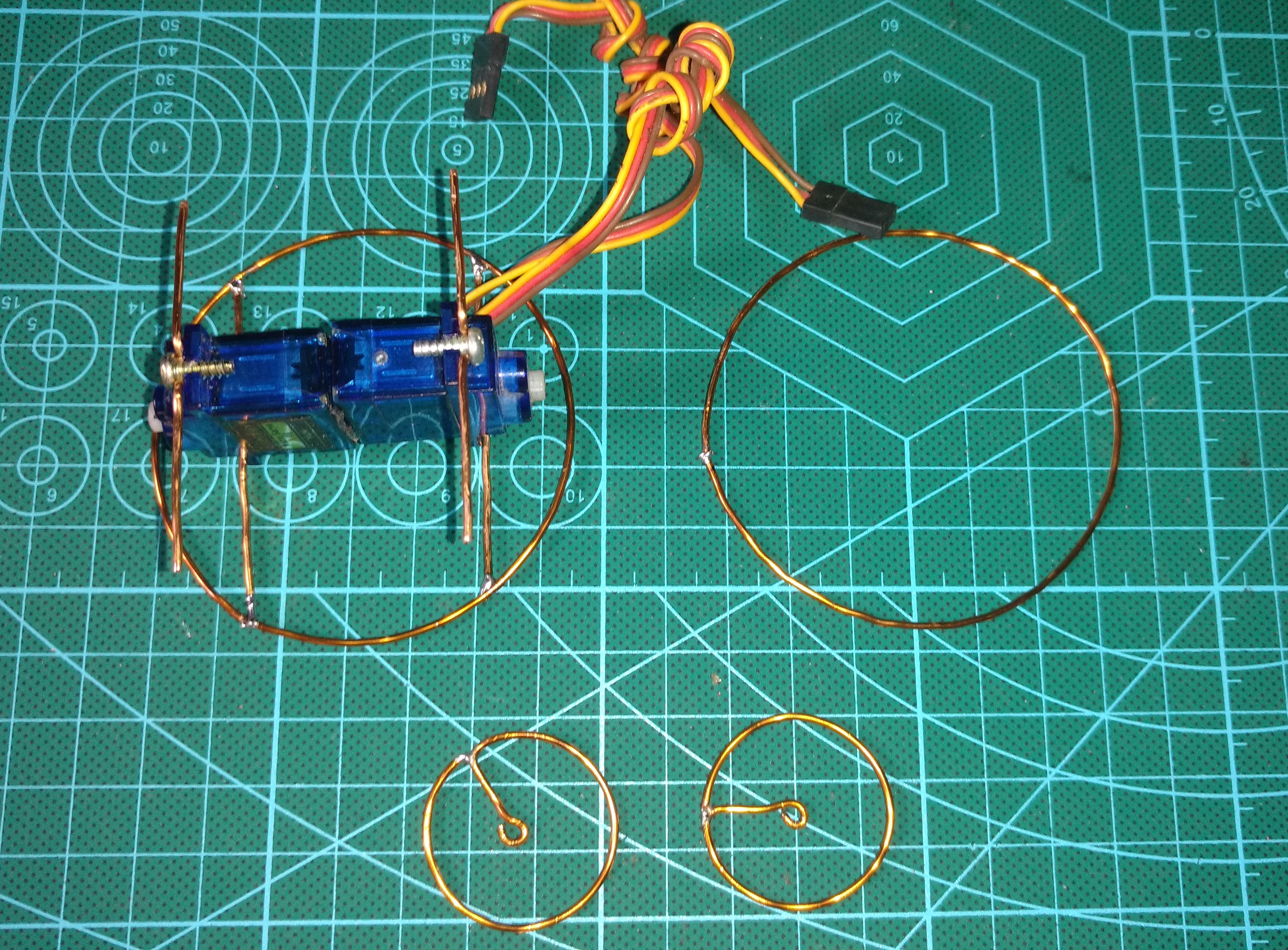
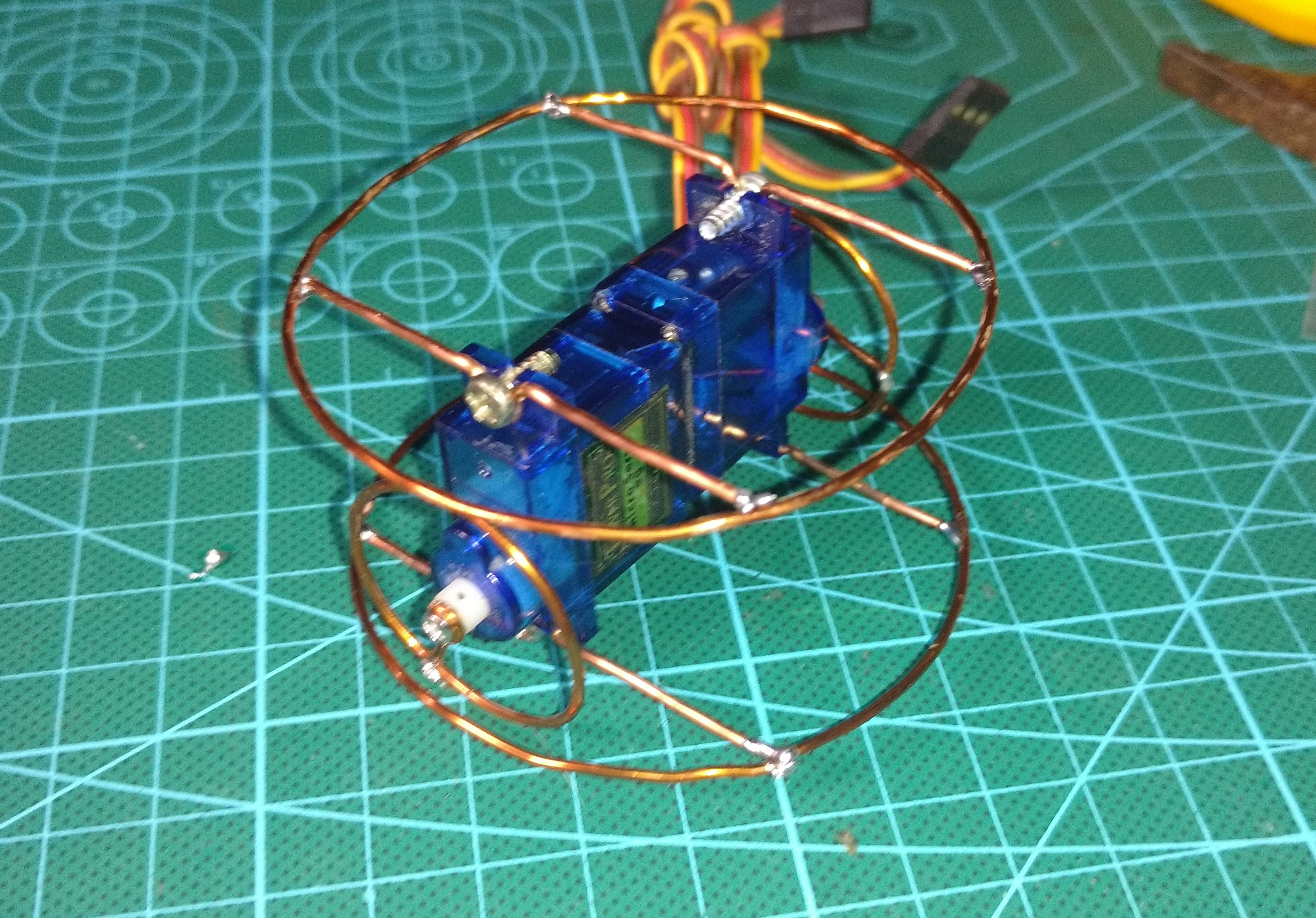
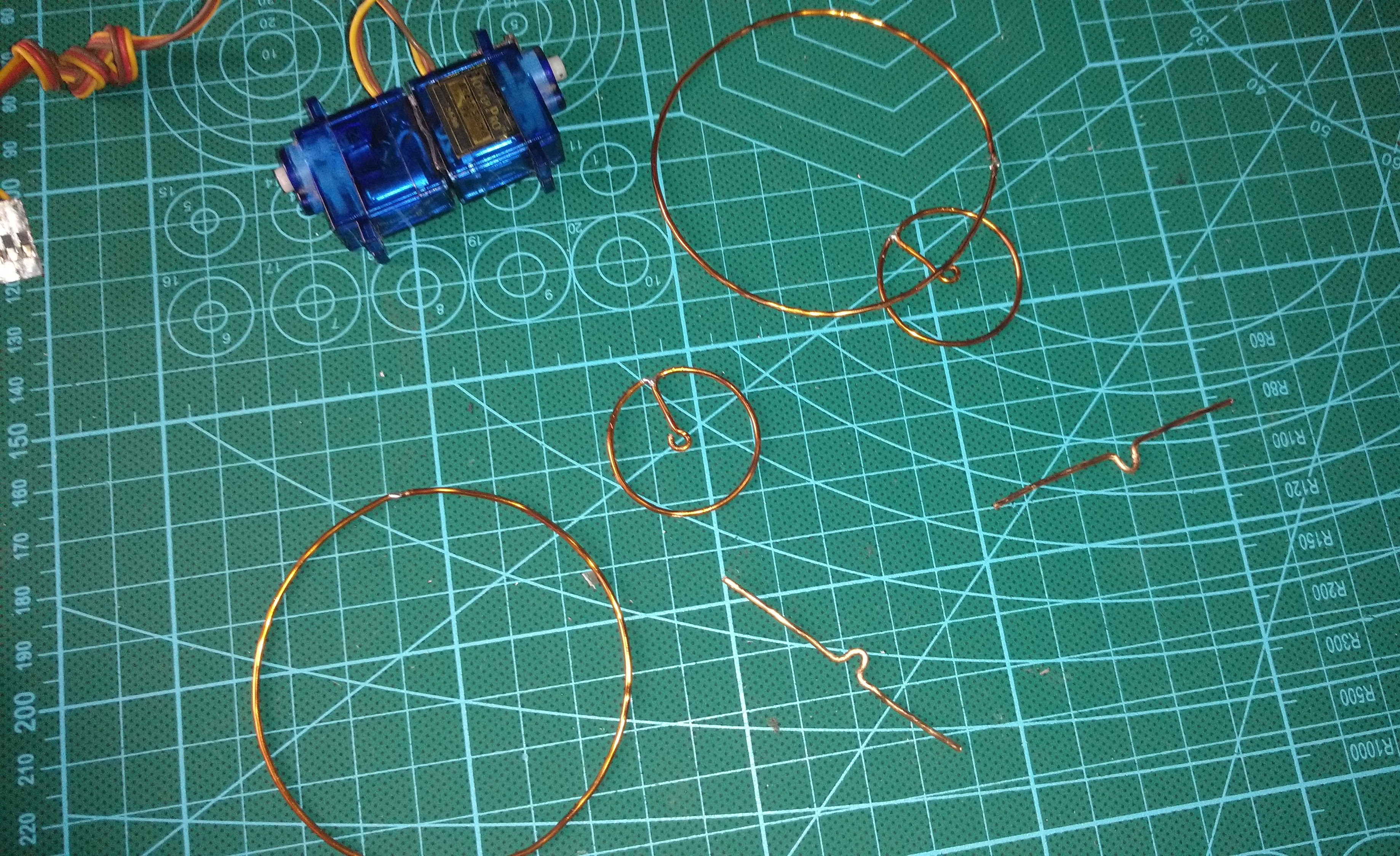
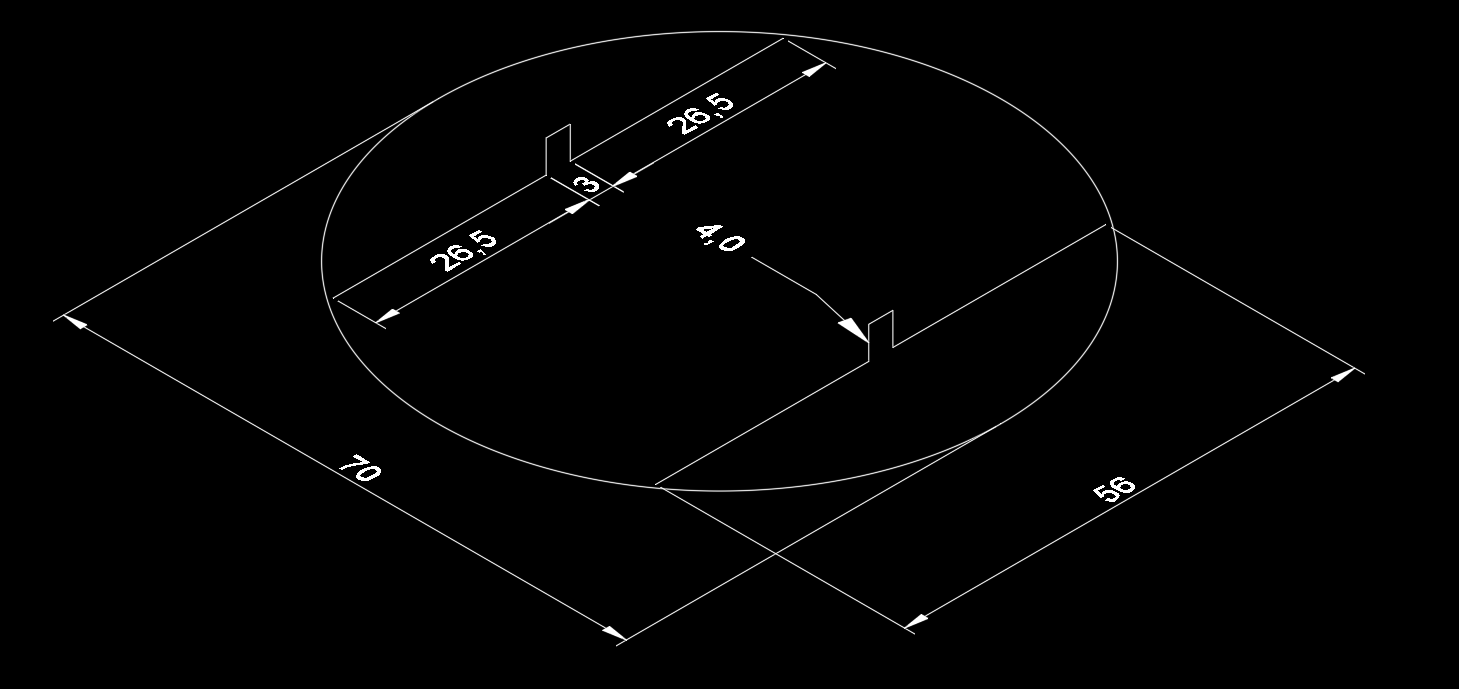
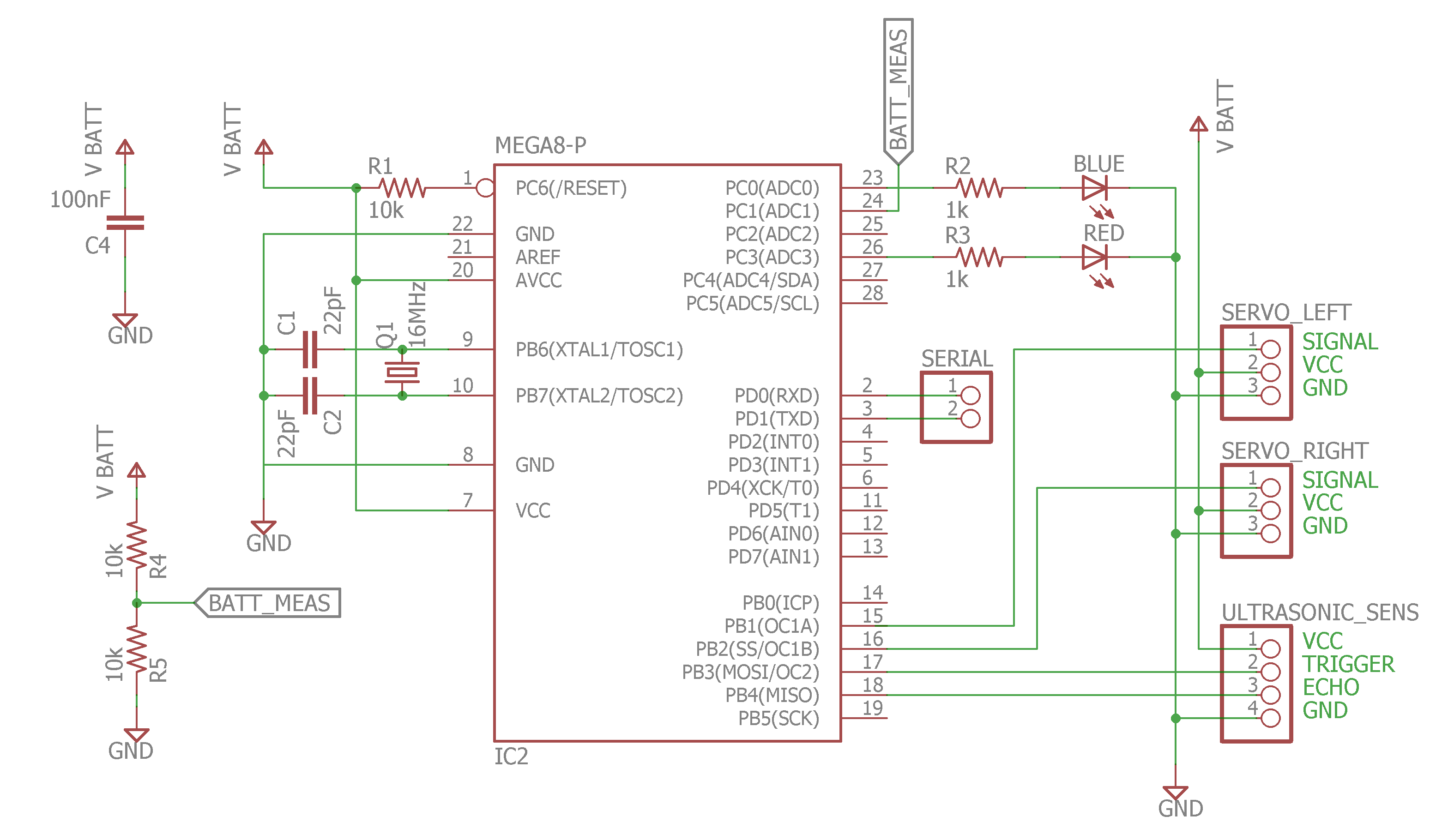
RobsonCoutoThis is a tiny robot with chassis made from AWG 16 wire soldered together. The servos are micro servos hacked for continuous rotation, these also give the robot some support. The brains of the robot is an Atmega8 with code for avoiding objects with aid of an ultrasonic sensor.
When bulding this I had the wire "jump" at my face of throw solder at me, as it behaves as a spring. If you would make something like this, please use protection goggles . I know someone who lost an eye to a piece of wire when they were a child. Vision is too important to be careless.






 Jithin Sanal
Jithin Sanal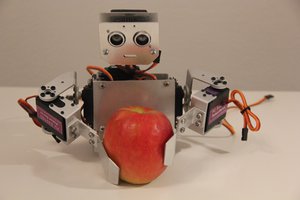
 M. Bindhammer
M. Bindhammer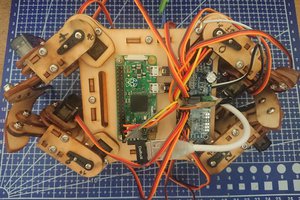
 Kea
Kea
I can have a friend at last!!! ;)