 Ivannikov Kirill
Ivannikov KirillSupported telemetry protocols:
- MavLink v2 (one directional mode)
- LTM https://quadmeup.com/ltm-light-telemetry-protocol/
Position step 0.2 degree (GhettoStation has only 1 degree)
3D printed antenna tracker on STM32
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
Supported telemetry protocols:
- MavLink v2 (one directional mode)
- LTM https://quadmeup.com/ltm-light-telemetry-protocol/
Position step 0.2 degree (GhettoStation has only 1 degree)
Settings change using OLED screen.
I did some work to refactor gui and add ability to change some settings from interface. It should be very useful at the field.
Today I've done EEPROM emulation inside FLASH (stm32f103 does not have EEPROM)
Also implemented settings that can be edited from CLI
Now I have commands:
get <setting> set <setting> <value> dump
After tracker starts, processor checking settings version and if it different from hex it just set default values.
Now I have that settings can be tuned:
set serial_baud 115200 set gps_baud 9600
In feature I will migrate all constants to settings value.
I've done LTM telemetry.
Used SITL http://ardupilot.org/dev/docs/sitl-simulator-software-in-the-loop.html to emulator quadcopter.
I managed vehicle using APL Planner 2.0
And also I written simple converter that just listen MavLink v1 messages from simulator converts its to LTM and send it to serial port. https://github.com/kiryam/mavlink2LTM
Check video:
Need to improve follow algorithm (now it works like I have only 360 maximum movement limit.)
Also I thinking about to do interpolation and movement prediction algorithm.
I have some problems with parallel smooth moving pan and tilt. Because I have only one core I can't do this job in parallel. I can do it only in concurrency mode, but since I have very small timeouts while stepper moves (sometimes < 1ms) I can't efficient switch to another task (because context switch will require significant amount of ticks ). It makes CPU usage about 100% at fast movings. If I will have separate cores for movement and trajectory processing I can do pan and tilt in parallel.
Very basic version almost done. I need to do settings tuning from CLI and It ready to testflight.
Because in Russia right now not good wheather to flight I think I will do more improvements in this project.
Just tested temperature of stepper and driver.
After one hour of working TMC2130 had temperature 88C. I checked datasheet and it is ok. (Overheat protection should started from 100 to 120 degree.) I think we doesn't need active cooling here. May be in future I add some additional holes in box.
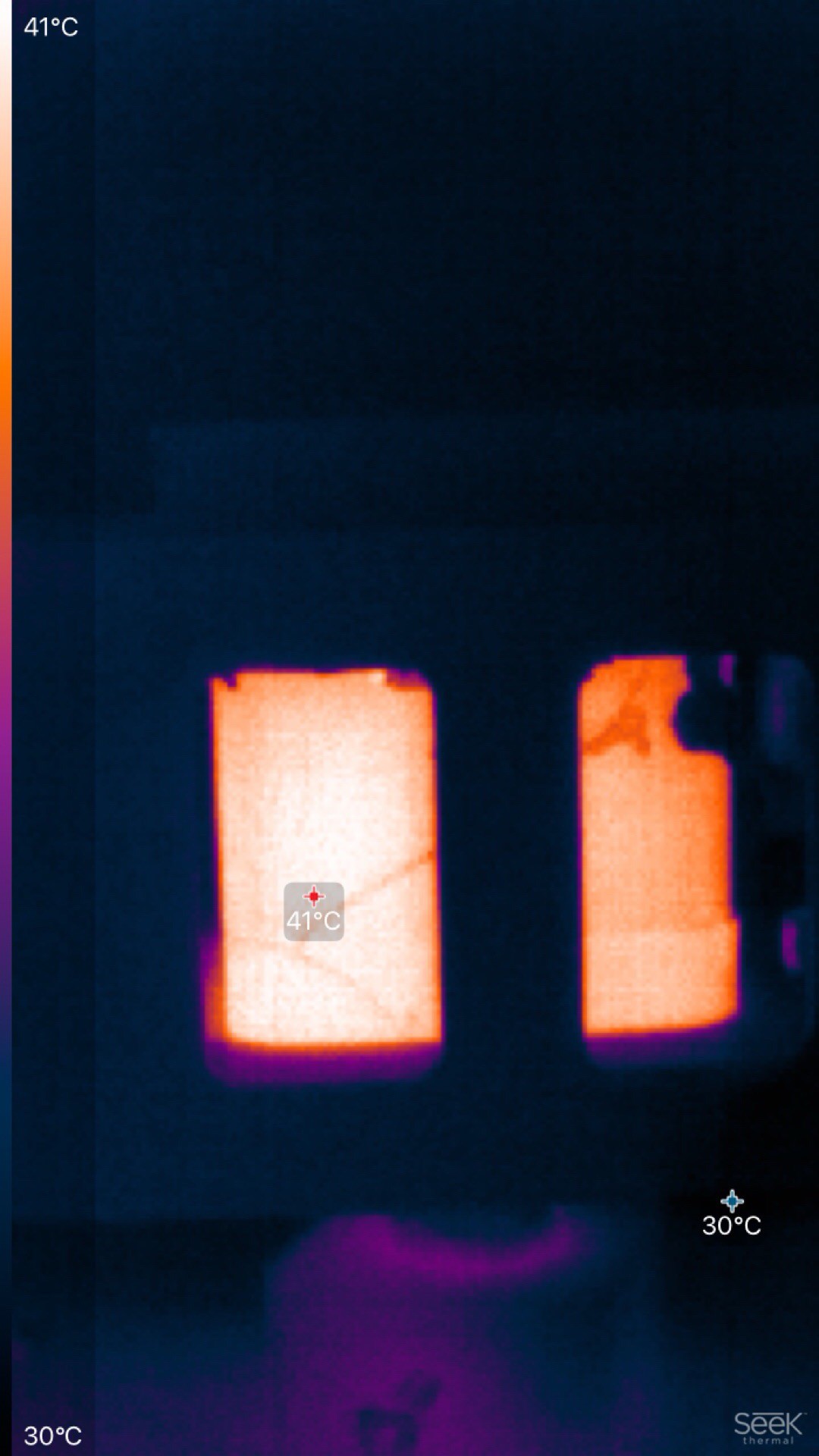
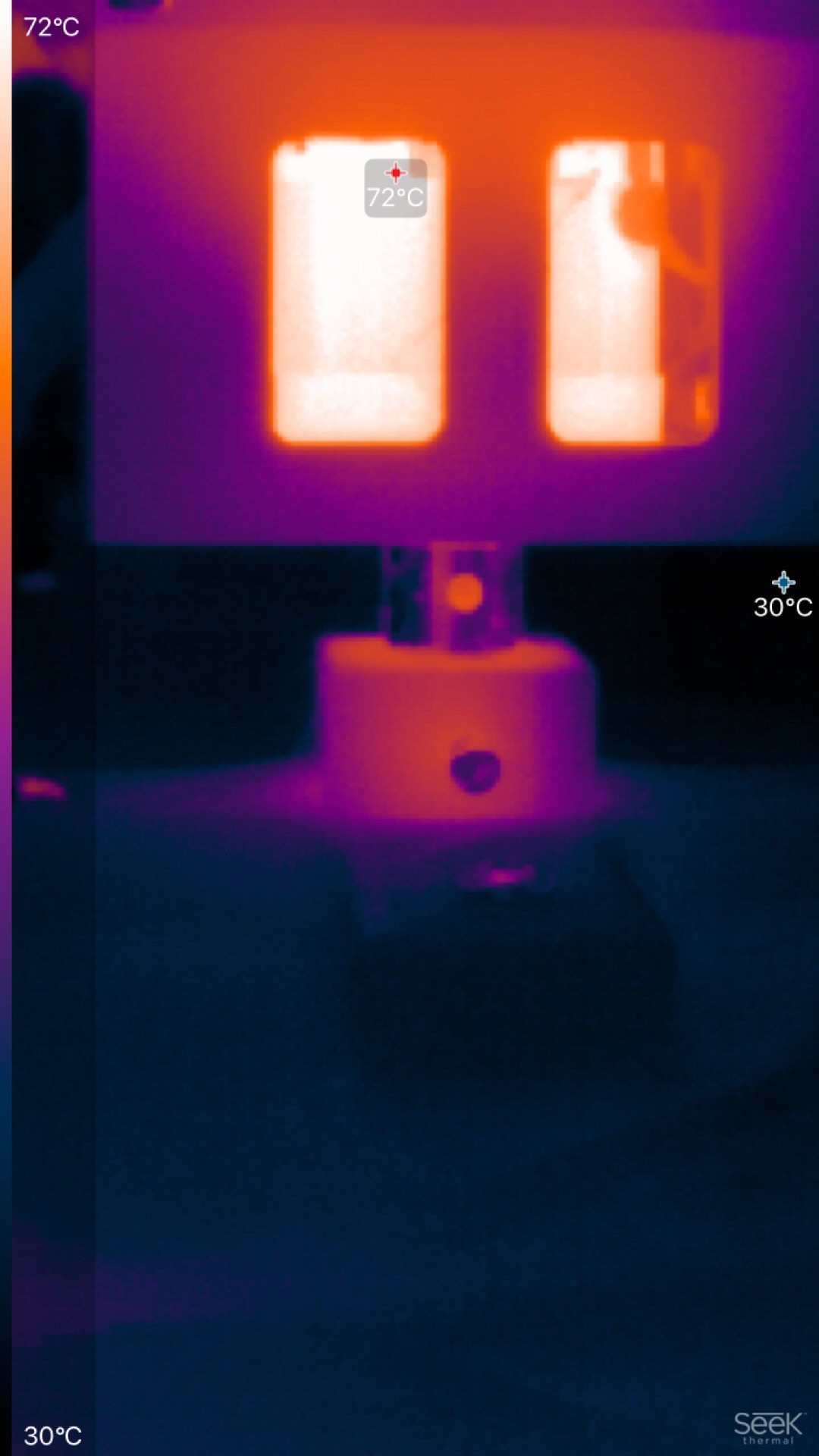
Different situation at stepper:
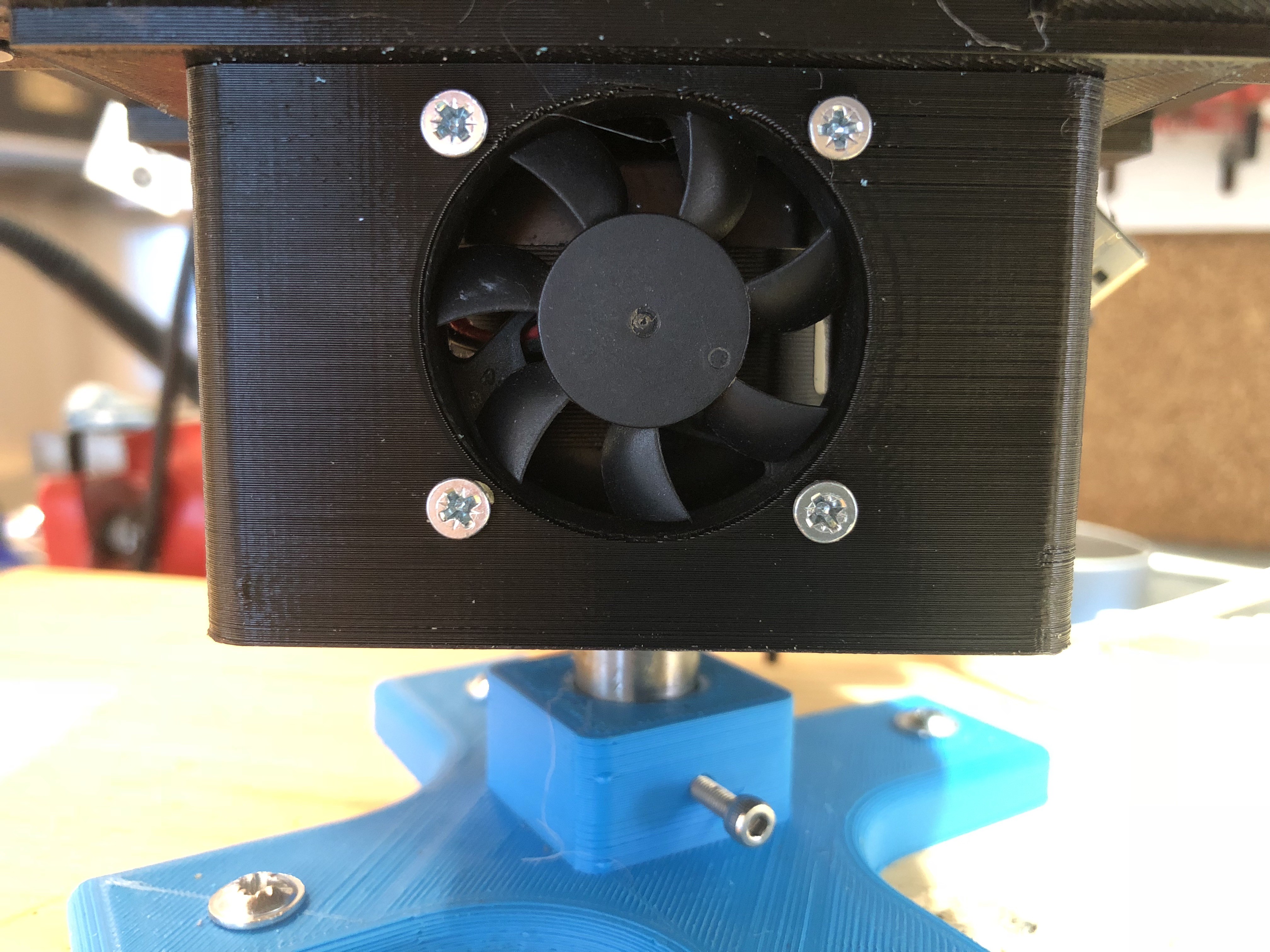
72C not too bad for NEMA 17 stepper (depends on class working temperature is 105-180C) but since it is 3d printable 72 it is maximum for PTEG. I decided to add 40mm cooler fan.
Image changes after one hour of work 41C.
I spent some time to make moves smoothest. Because since i use stepper motors i had step skipping sometimes. So i decided to port Arduino stepper library to STM32. I had a little trouble with microsecond delays which has been used in Arduino library and I changed implementation a little. Now I can control speed acceleration and deceleration of my stepper. Also I switched stepper driver from A4988 to TMC2130 and now I have silent precision and smooth bearing moves.
I liked how it moves and think about to change 20kg servo to stepper with reductor.

Very useful project, I would like to see more projects like this! Thx

that is pretty damn smooth and quiet. Have you got it tracking RSSI successfully yet?

No, I don't have RSSI tacking yet.
Right now supported only one direction telemetry. Mavlink and LTM.
I completed simulation telemetry test, will provide additional info soon.

 Petar Crnjak
Petar Crnjak
 Walker Eric
Walker Eric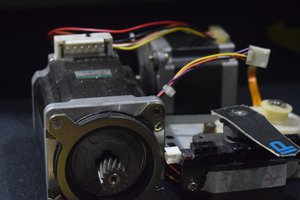

Hi Krill, Do you have a ready-made compiled version of the tracker and how it connects to the pin processor. Very impressive idea.