Ivannikov Kirill
Ivannikov Kirill-
Settings change using GUI.
01/13/2019 at 15:18 • 0 commentsSettings change using OLED screen.
I did some work to refactor gui and add ability to change some settings from interface. It should be very useful at the field.
-
Settings in EEPROM and CLI settings edit
01/05/2019 at 16:19 • 0 commentsToday I've done EEPROM emulation inside FLASH (stm32f103 does not have EEPROM)
Also implemented settings that can be edited from CLI
Now I have commands:
get <setting> set <setting> <value> dump
After tracker starts, processor checking settings version and if it different from hex it just set default values.Now I have that settings can be tuned:
set serial_baud 115200 set gps_baud 9600
In feature I will migrate all constants to settings value.
-
LTM telemetry and test using SITL
12/31/2018 at 13:59 • 0 commentsI've done LTM telemetry.
Used SITL http://ardupilot.org/dev/docs/sitl-simulator-software-in-the-loop.html to emulator quadcopter.
I managed vehicle using APL Planner 2.0
And also I written simple converter that just listen MavLink v1 messages from simulator converts its to LTM and send it to serial port. https://github.com/kiryam/mavlink2LTM
Check video:
Need to improve follow algorithm (now it works like I have only 360 maximum movement limit.)
Also I thinking about to do interpolation and movement prediction algorithm.
I have some problems with parallel smooth moving pan and tilt. Because I have only one core I can't do this job in parallel. I can do it only in concurrency mode, but since I have very small timeouts while stepper moves (sometimes < 1ms) I can't efficient switch to another task (because context switch will require significant amount of ticks ). It makes CPU usage about 100% at fast movings. If I will have separate cores for movement and trajectory processing I can do pan and tilt in parallel.
Very basic version almost done. I need to do settings tuning from CLI and It ready to testflight.
Because in Russia right now not good wheather to flight I think I will do more improvements in this project.
-
Stepper heating
12/30/2018 at 09:32 • 0 commentsJust tested temperature of stepper and driver.
After one hour of working TMC2130 had temperature 88C. I checked datasheet and it is ok. (Overheat protection should started from 100 to 120 degree.) I think we doesn't need active cooling here. May be in future I add some additional holes in box.
![]()
Different situation at stepper:
![]()
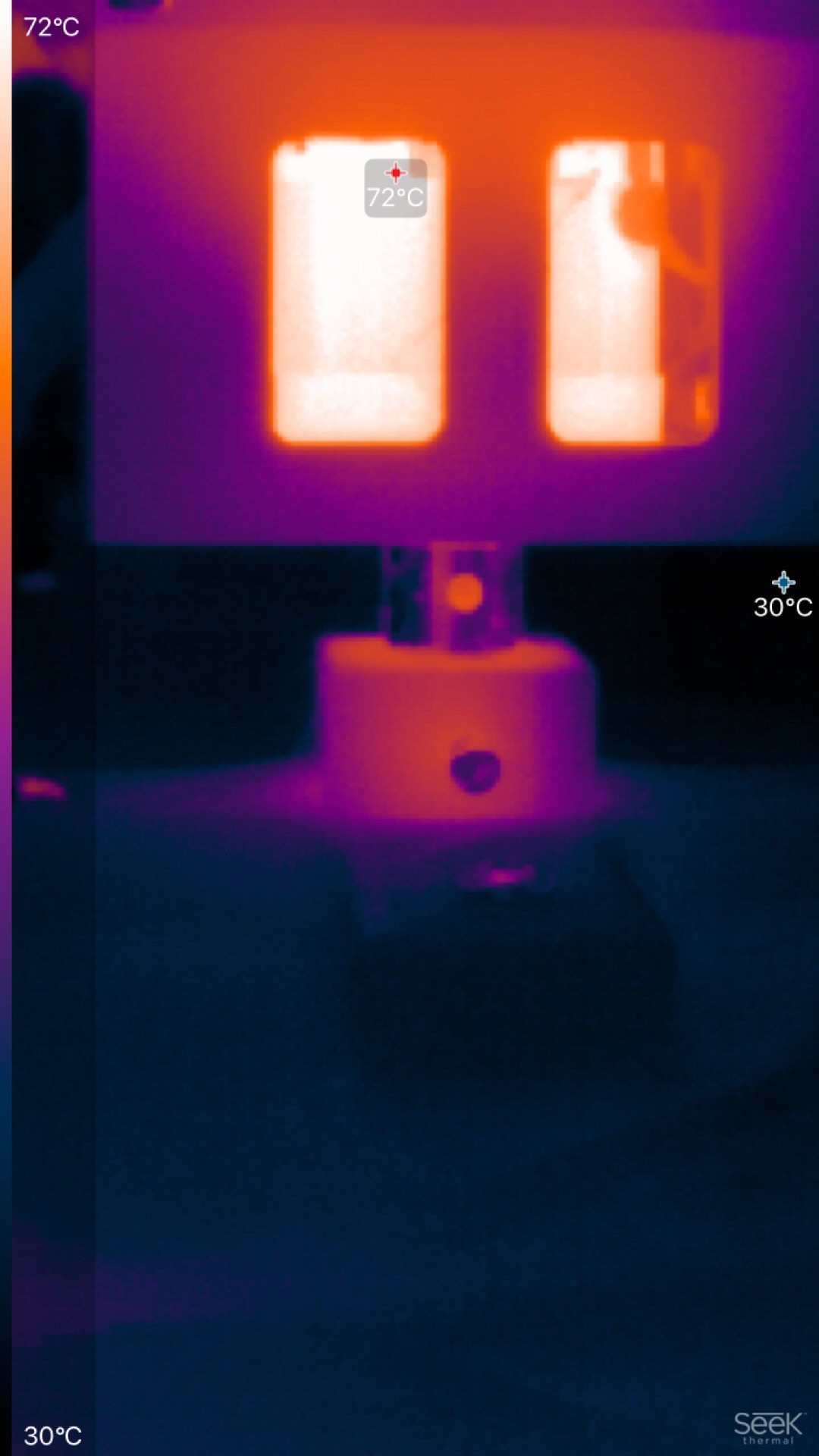
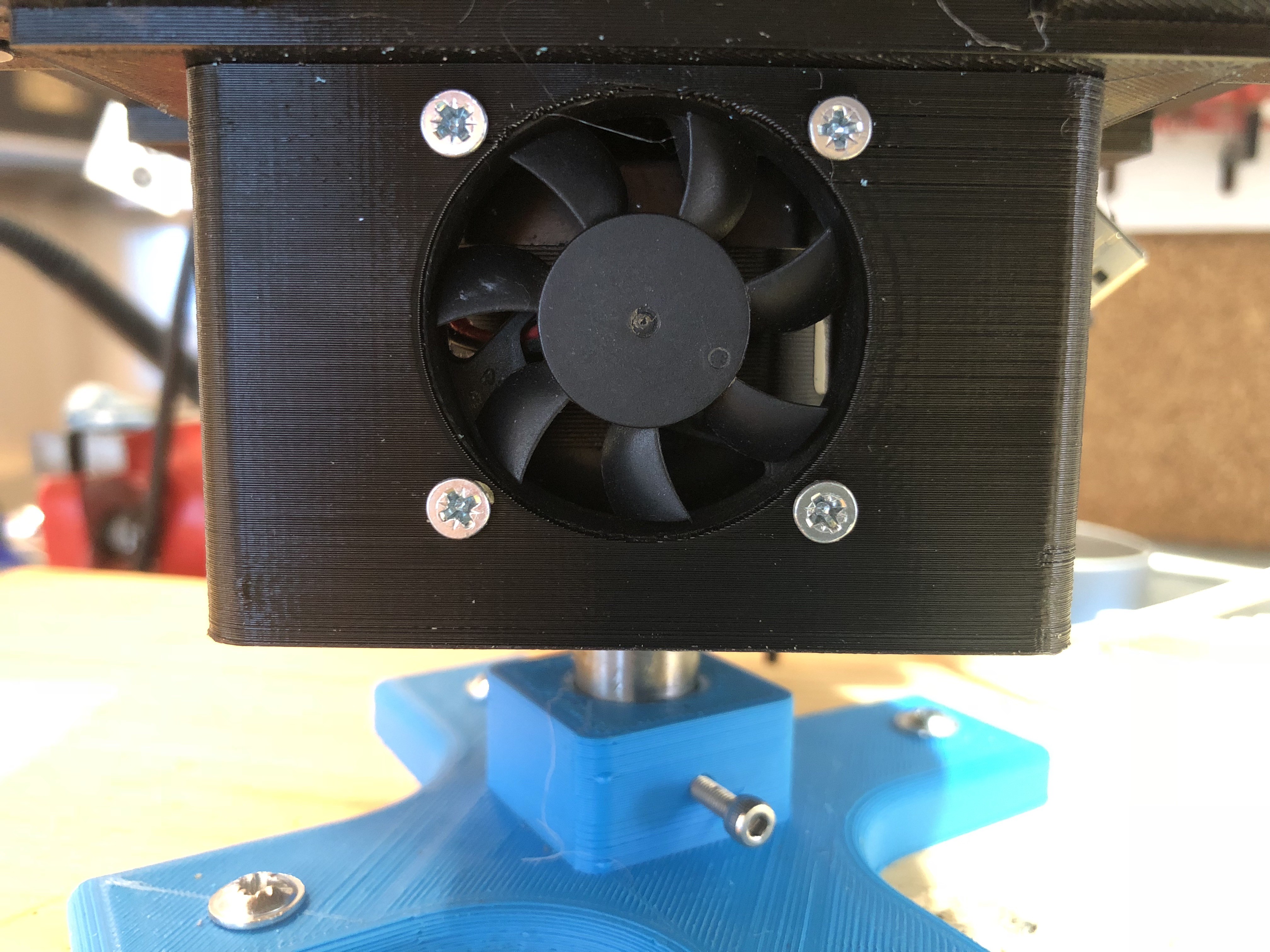
72C not too bad for NEMA 17 stepper (depends on class working temperature is 105-180C) but since it is 3d printable 72 it is maximum for PTEG. I decided to add 40mm cooler fan.
![]()
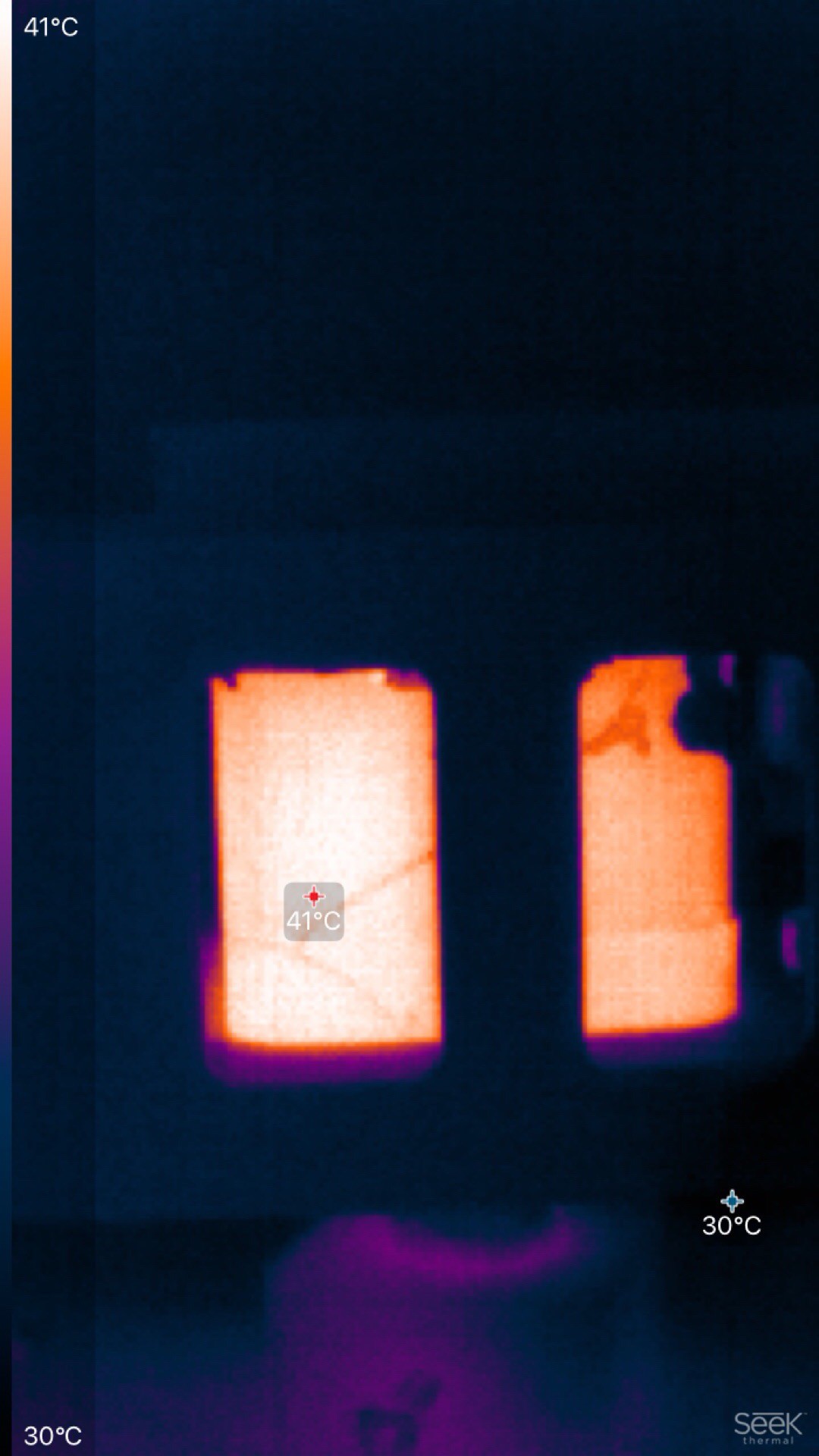
Image changes after one hour of work 41C.
![]()
-
Improvement for smooth movement
12/27/2018 at 12:26 • 0 commentsI spent some time to make moves smoothest. Because since i use stepper motors i had step skipping sometimes. So i decided to port Arduino stepper library to STM32. I had a little trouble with microsecond delays which has been used in Arduino library and I changed implementation a little. Now I can control speed acceleration and deceleration of my stepper. Also I switched stepper driver from A4988 to TMC2130 and now I have silent precision and smooth bearing moves.
I liked how it moves and think about to change 20kg servo to stepper with reductor.