 Varshith Solipuram
Varshith Solipuram[Ongoing]
Will have 3 center mounted servos controlled by a ESP32s (for future upgrades when I want to connect to Google assistant or make it my assistant). Wire routing and management is going to be hard.
I wanted it to be as proportional to the original one but a lot of other factors like print times and known warping issues with our filament/printer made me squeeze it a little bit. (Lets call it length contraction :p)
Printed it before the holidays in a hurry and as expected, stuff went wrong. Printed the middle servo mount adapters with wrong dimensions. Till the university re-opens and I get access to the printer again, I decided I will get done with the cosmetic part of it.
Starting off with sanding it with 9 levels of grit from 120-3000.









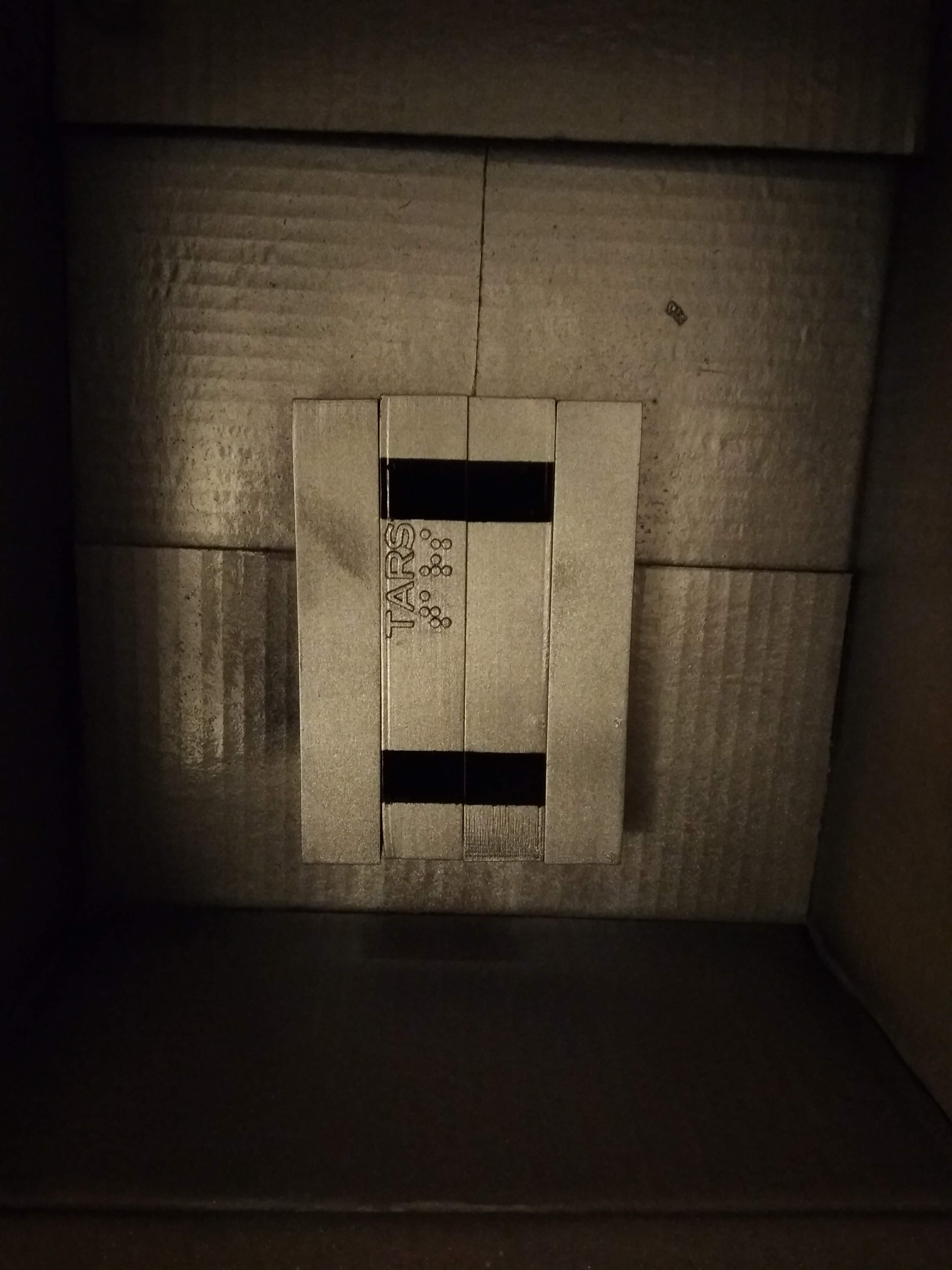

To finish it off, I applied some Meguiar's ultra-cut compound and a Mirror glaze polish and rubbed it with a micro fiber towel. Painted the 'TARS' with a gold-ish acrylic marker. I think I'll stop with the visual part now.




How do you plan on making it possible for it to walk? On the movie set it was just carried around by a human walking behind it, who later got removed, because it's impossible mechanically for it to actually be able to walk.