 Chris
ChrisI've been getting into astrophotography recently. If you've ever tried taking a picture of stars in the night sky using a long exposure on a fixed tripod, or if you've seen streaky pictures of stars, then you've seen star trails. Star trail photography is beautiful in its own right but I'm interested in long exposure photography of specific sections of sky and I'm going for sharpness.
I'm shooting using a Nikon D3100 and a Rokinon 14mm F/2.8 lens. This lens is wide angle and is very forgiving in terms of cancelling out star trails. Using the Rule of 500 I can go for several tens of seconds at a time (theoretically 34 but trails start to show up around 25)...but I want more. MORE! MOOOORE LIGHT!
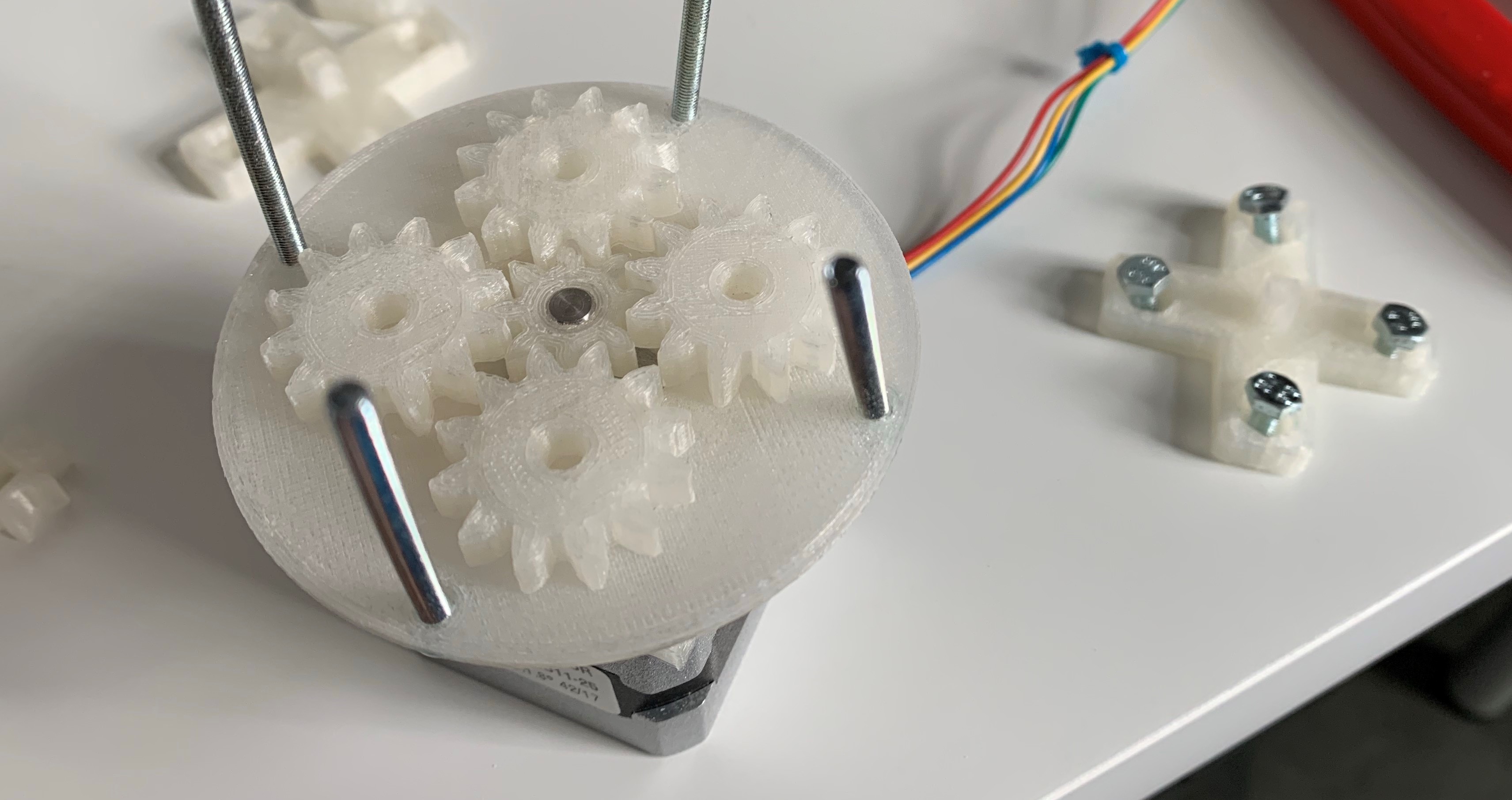
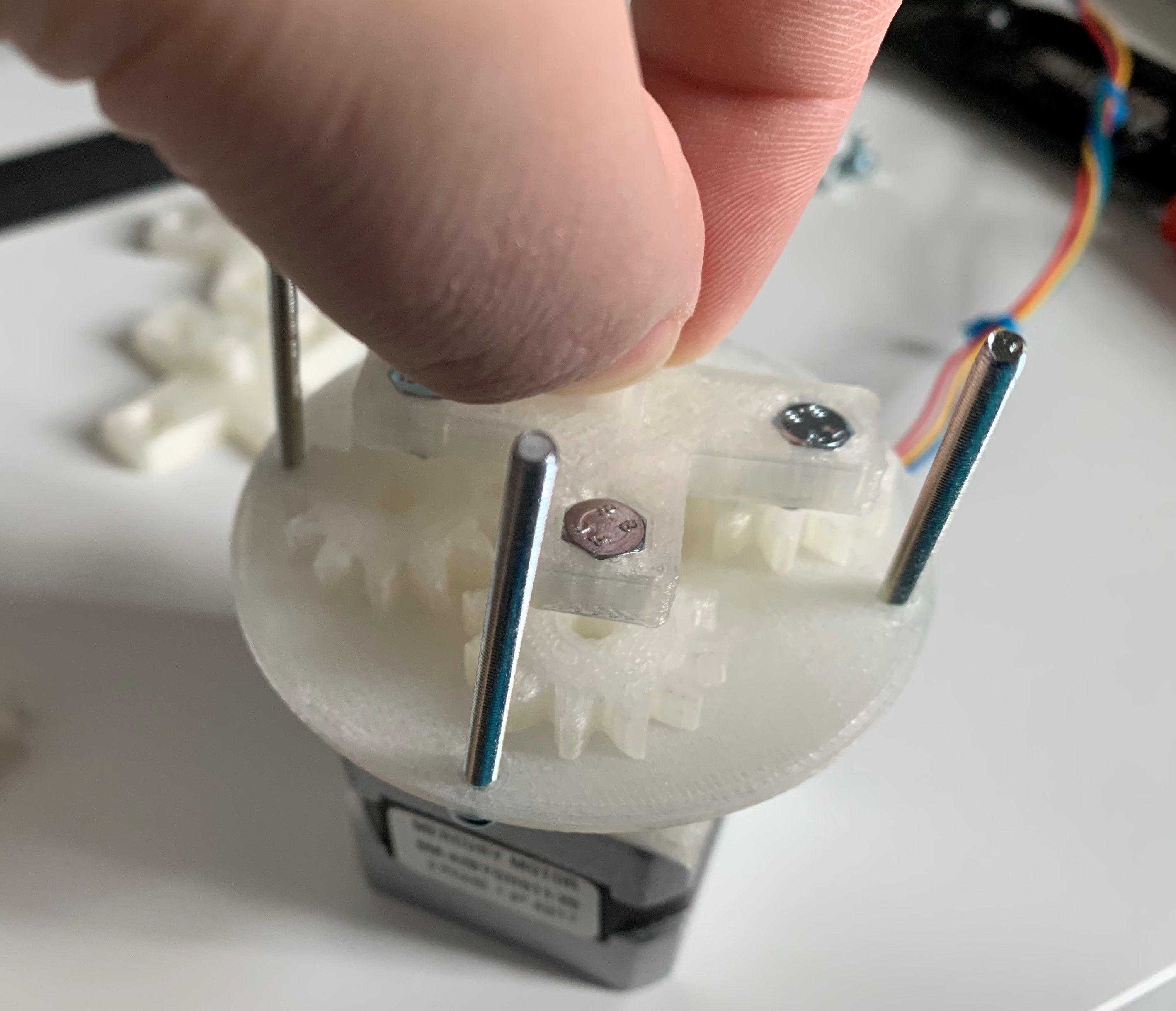
A tracking mount is a tripod mount for a camera or a telescope that lets the user fix on a single section of sky. Once the shutter is open the tracking mount moves to keep the object centered. Sometimes this is accomplished with a second camera and image processing software to determine whether the focal object has moved, but this can be done more simply by moving the camera to cancel out the sidereal rotation of the Earth. There are many types of homebrew tracking mounts. This one is mine!
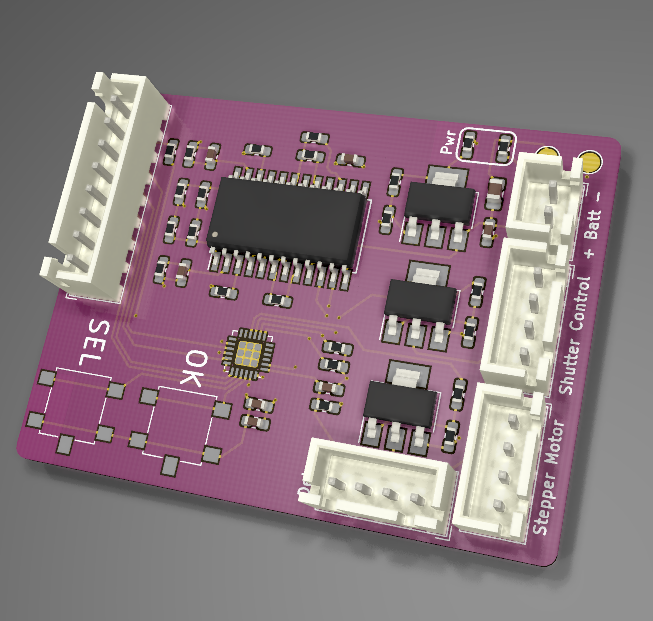
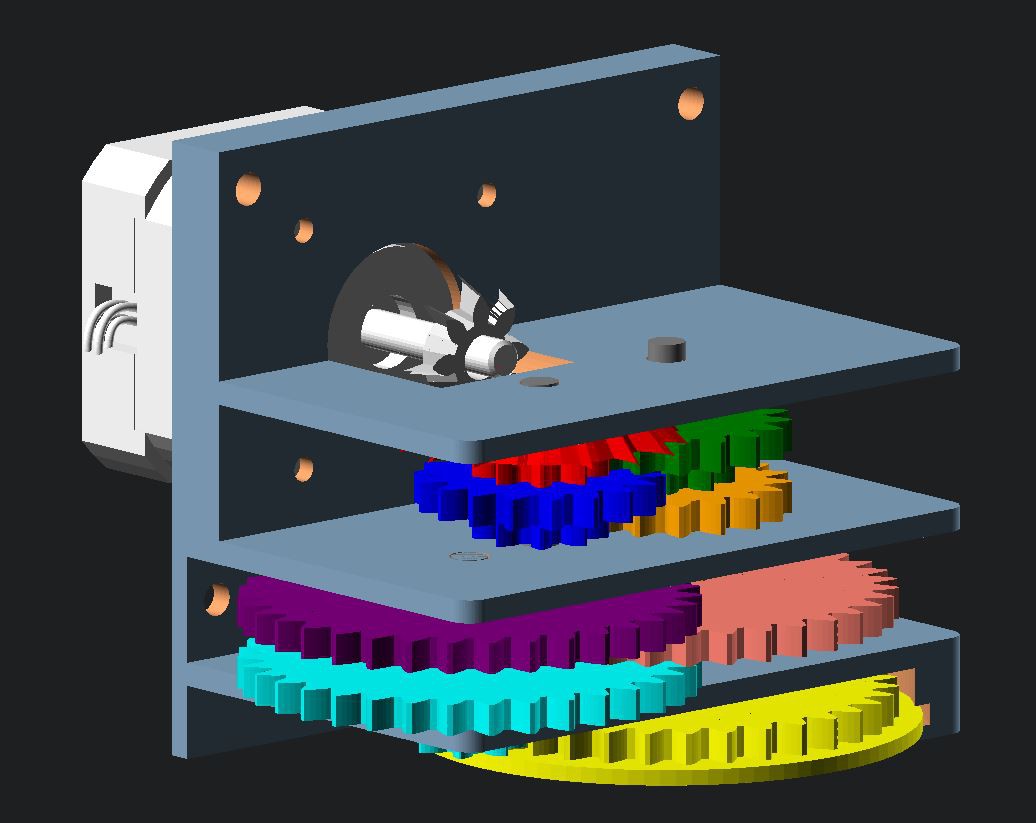
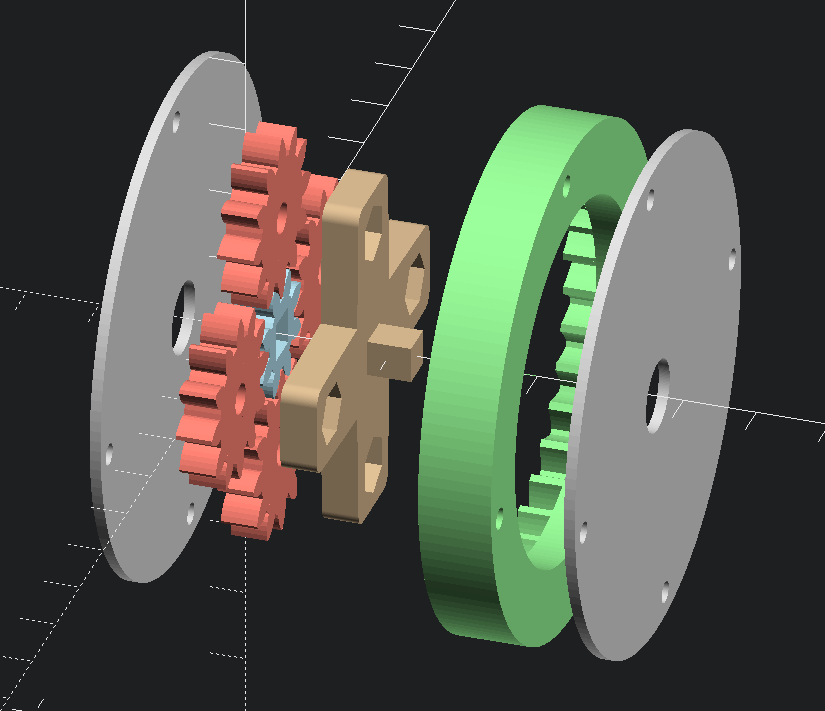
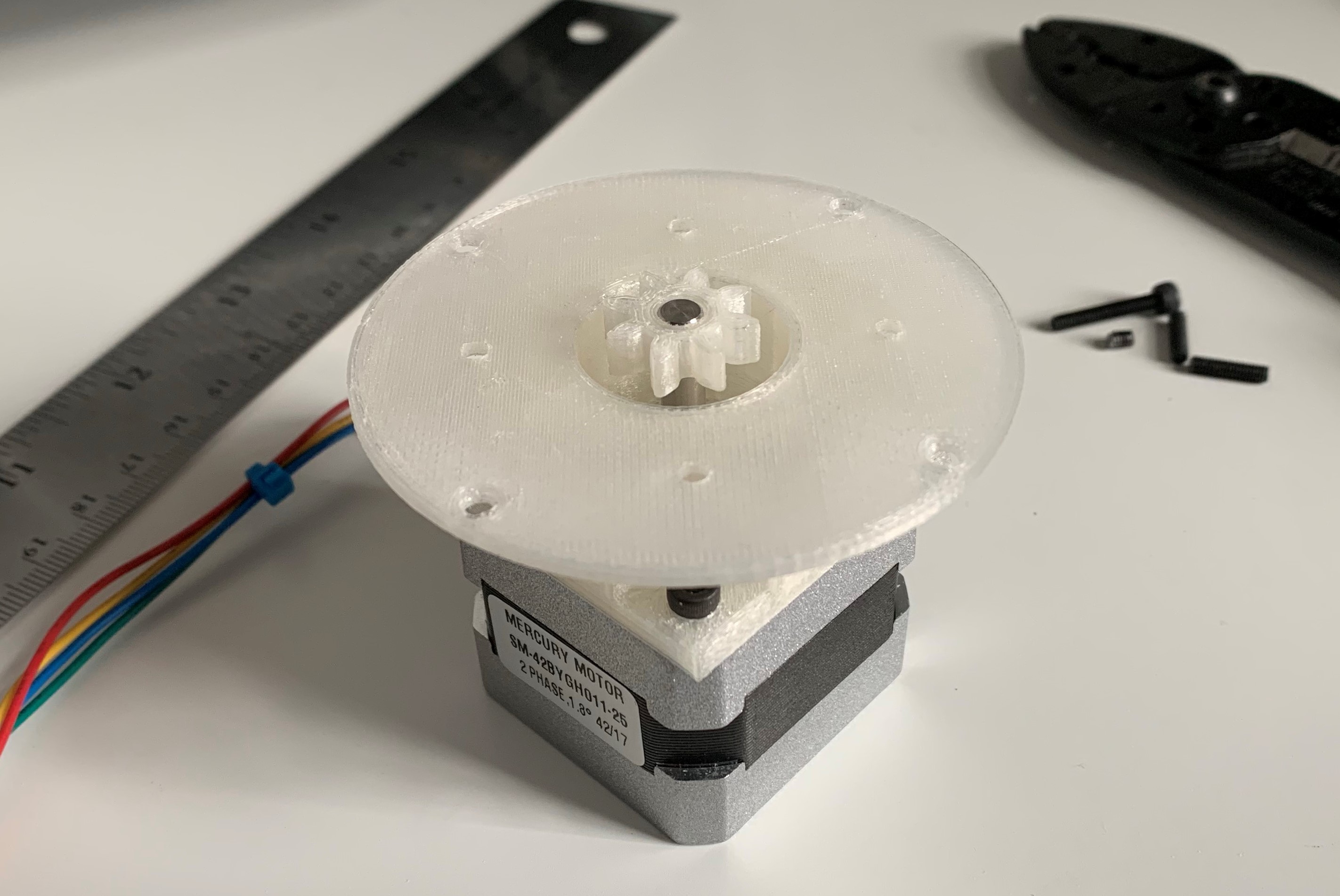
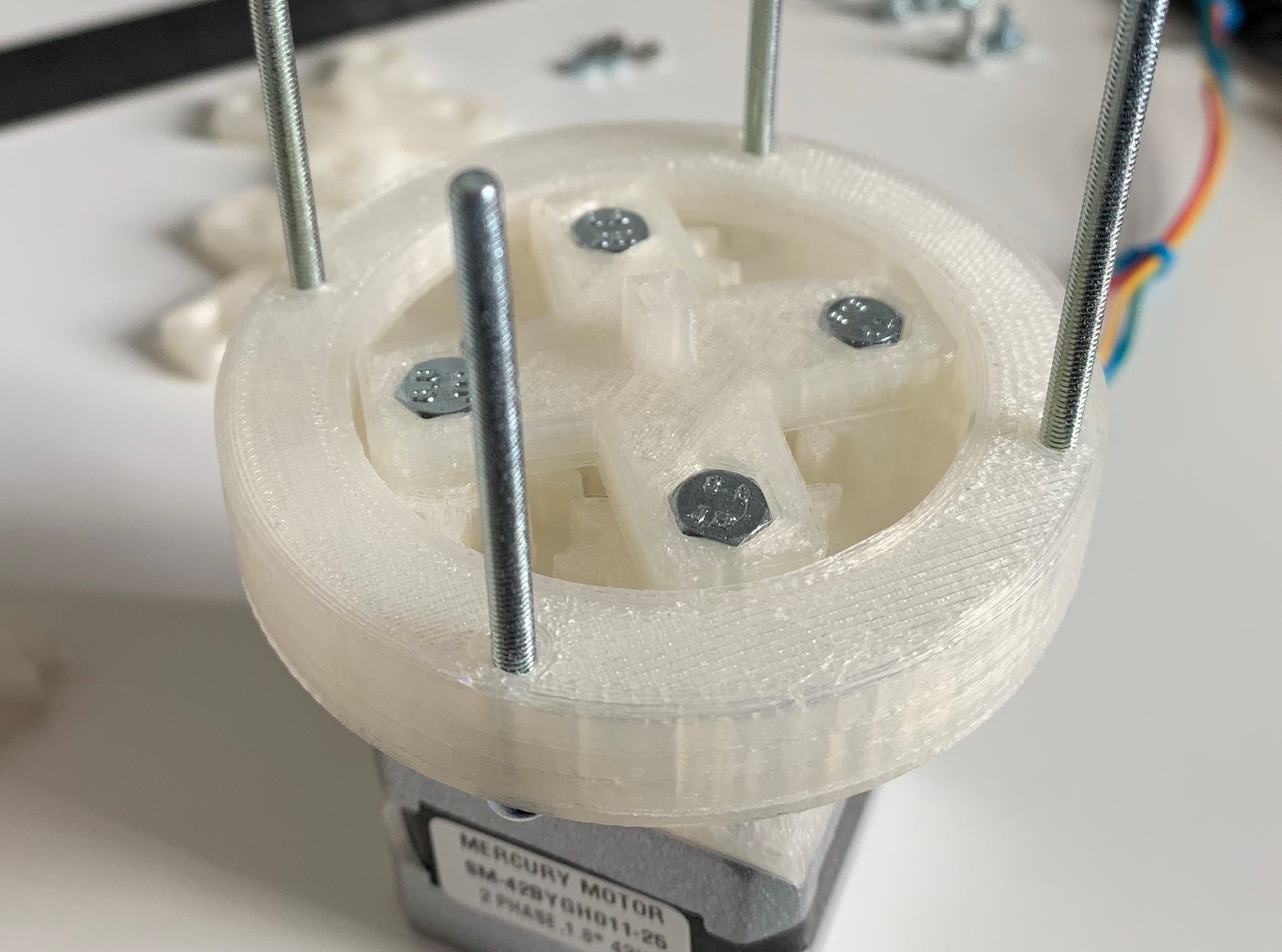
This is a work in progress! All the gearing has been printed and assembled, the PCBA is done, the firmware is complete, and all the critical features have been tested - but February in Kansas City is not kind to astrophotographers. I probably won't have a chance to test this out for real for a couple months yet, on an upcoming trip to Caprock Canyons. Pictures will be up ASAP!














 Jrsphoto
Jrsphoto
 Kevin Kadooka
Kevin Kadooka
yes it looks like a very nice and attractive idea i am also working on vlogging camera project you can see here https://vloggingsetup.com/