An Arduino Uno-based drone in less than a 100 lines of code.
The control loop runs at less than 20 Hz. This is quite slow and causes the drone to be unstable, unless a (second order) acceleration term is included in the linear regulator.
The benefit is that the control loop takes up very few resources, allowing the microprocessor to carry out other tasks, for instance managing the wifi communication.
Having the kids program the drone is part of a wider pedagogical progression, starting out by the first building and learning to fly a small in-door drone:
Assembling an in-door droneLearning to fly Drone Team 2022
At The Franco-Danish School we are designing and building robots (in particular Dark Side Rovers) with the kids.
Our old way of assembling the robots was based on pin connectors, inspired by the Lego Technic Pin (part. no. 3673). However, when these are printed in PLA as we do, the strength, precision and elasticity are far from those of the injection-molded versions of Lego. It sort of works, but the pins are too difficult for the kids to insert into the holes of the plates on their own and break after a while. Good enough to get started, but not a feasible way forward to our ultimate goal of building robots that can build robots.
For quite a while we thought of a better way to assemble the Dark Side Rovers. We considered that robots are good at rotational movements, since they are generally based on motors and gears. They are also good at executing multiple tasks at exactly the same time...
And there came the idea of UnisynX and the Twisterbolts!
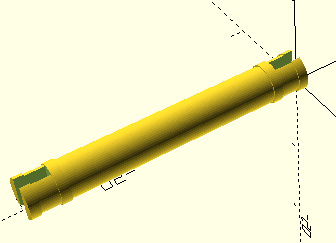
The Twisterbolts are plain old bolts, except that they are left-hand threaded at one end and right-hand threaded at the other. UnisynX is a construction that is being held together by the bolts. Twisterbolts (in green) fastening a UnisynX construction The key concept is that none of the bolts can be rotated on their own, all of them have to be rotated at once. The more bolts you have, the less likely each bolt is to "random walk" away from its intended state and the likelihood off-hand would seem to be dropping exponentially as the number of bolts used in the construction increases.
In our 3D-printed test constructions, there is enough slack for the twisterbolts to be rotated by hand, a few degrees at the time, one after the other in a round-robin fashion. For metallic high-precision versions, that wouldn't be feasible and would require either electronically synchronized power screwdrivers or a planet gear as shown below:
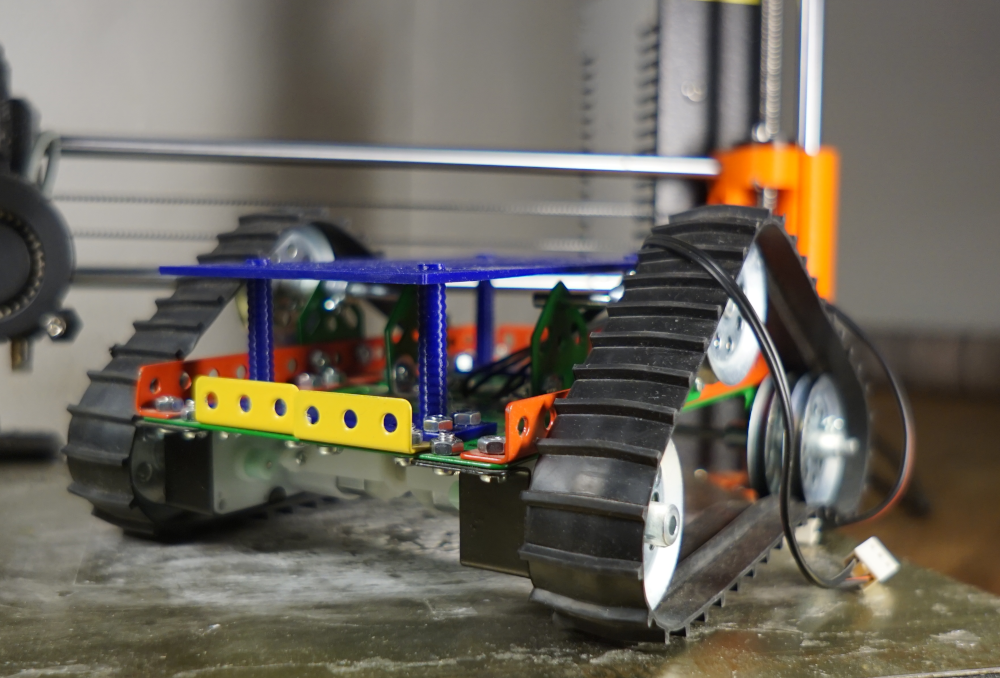
The rovers now start looking like this:
The invention is in the public domain and is completely free for use.
So in a couple of weeks, we're off to Italy. We'll be visiting the Arduino development and manufacturing centers in Turin, visit the da Vinci Museum in Florence and finally spend four days in Rome for the MFR19.
That will also be the baptism of fire of our Flying Hacker Lab - a transportable maker space aimed at engaging people - and particularly educators - in hacking.
The fully deployed lab consists of six stations:
* a soldering workshop for soldering all kinds of stuff, including jewelry
* a robot assembly corner
* a 3D printing workshop
* a programming corner
* a robot Dark Side Challenge test track
* a hyggelig story-telling and drawing corner
Many thanks to our sponsors for supporting the trip and the Flying Hacker Lab:
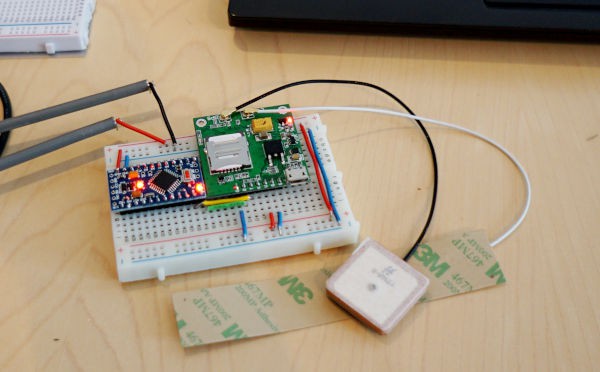
The Dark Side Probe is about using the Dark Side Challenge software stack to collect information in a remote area, with a particular attention to battery life & power consumption
The current version consists of an Arduino Pro Mini managing a SIM7000E GSM+GPS module.
We have simply added the SIM7000 functionality by reusing (refactoring) most of the existing ESP8266 code.
What we are still missing is:
* to find out how to make the SIM7000 enter sleep mode
* reduce the time it takes to get a GSM connection (currently takes >10 min). The target is a few seconds, as we would like to achieve a year-long battery life.
* get GPS information from the SIM7000, possibly using Assisted GPS
... a group of children are evaluating how fun and educational their session with Dark Side Rover Icebot just was: left hand shows how fun (on a scale from 0-5), right hand shows how educational. Straight 10/10 !
Makeresses in the making!
Accomplished Dark Side Missions included "Under the bridge" and "Find the sandal"
 Nicolas Guilbert
Nicolas Guilbert


 However, when these are printed in PLA as we do, the strength, precision and elasticity are far from those of the injection-molded versions of Lego. It sort of works, but the pins are too difficult for the kids to insert into the holes of the plates on their own and break after a while. Good enough to get started, but not a feasible way forward to our ultimate goal of building robots that can build robots.
However, when these are printed in PLA as we do, the strength, precision and elasticity are far from those of the injection-molded versions of Lego. It sort of works, but the pins are too difficult for the kids to insert into the holes of the plates on their own and break after a while. Good enough to get started, but not a feasible way forward to our ultimate goal of building robots that can build robots.
 The invention is in the public domain and is completely free for use.
The invention is in the public domain and is completely free for use.




 ... the idea being to make it an actual Dark Side device for remote sensing/possibly acting.
... the idea being to make it an actual Dark Side device for remote sensing/possibly acting. Discovering the wonders of the glue pistol!
Discovering the wonders of the glue pistol! Wearing the badge in a debate on girls in STEM at the annual "Folkemøde" on the island of Bornholm.
Wearing the badge in a debate on girls in STEM at the annual "Folkemøde" on the island of Bornholm.