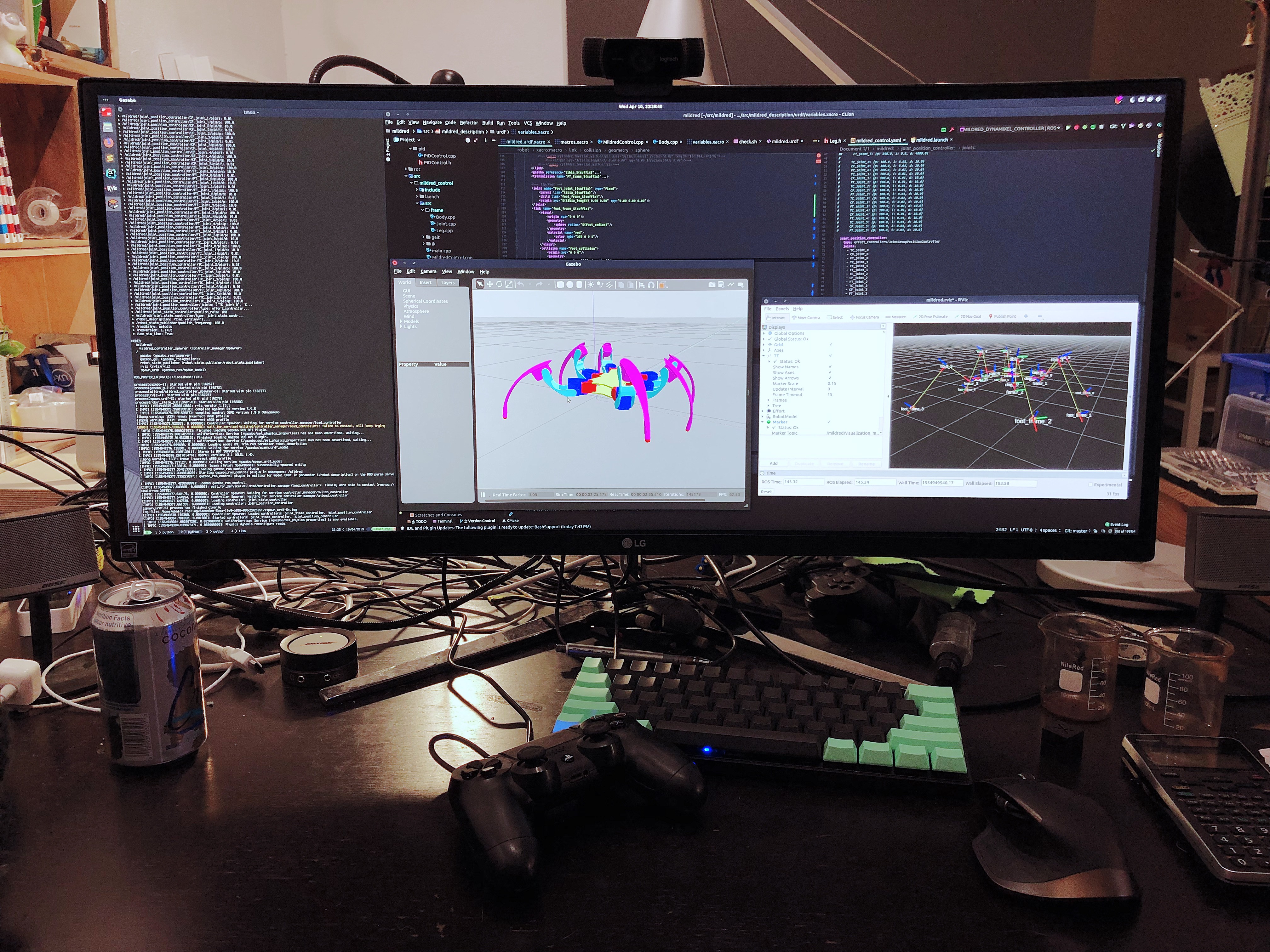
I am currently working on the startup routine. I am coding a finite state machine to manage the different states and their transitions into one another. For example, I currently have idle, sitting, standing and walking states set up with events to transition from one to the other.
I'm in the process of coding the standing state, which will consist of sensing where each leg is, bring them in a safe sitting position, then stand up.
There won't be any cool build pictures for a while. I'll be working on the software until I'm comfortable letting it run outside of the simulator. I still have a bunch of stuff to do before I can do this. After tuning the model in gazebo I have to code a startup routine where it will sense its limbs and safely bring them into a "sitting" position before standing up. Then I'll need code to manage switching leg distance from the body, so that I can reduce the large footprint that the long tibias is causing during the standup procedure before walking.
It can't move yet, but I made a first powered test to make sure that the motors were able to withstand the mass of the thing. It feels a little weak when I put it in a tripod configuration, I'll have to check if it's the motor or the power supply that's the issue on that one.
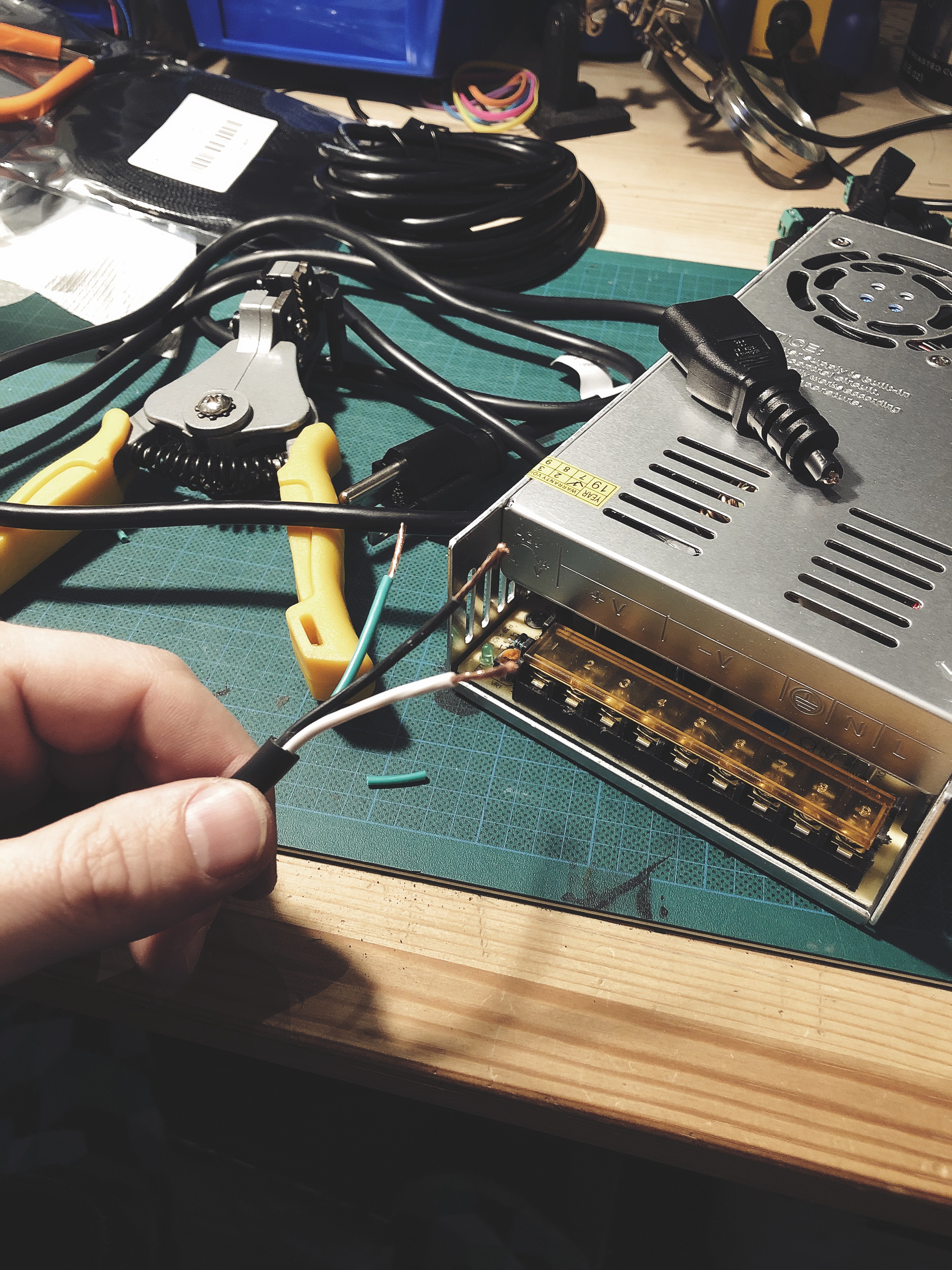
Disclaimer: I will properly fuse and mount it in an enclosure. For the time being, don't worry, this is in a tupperware so that neither me nor my cats can put their paws on the exposed live wires.
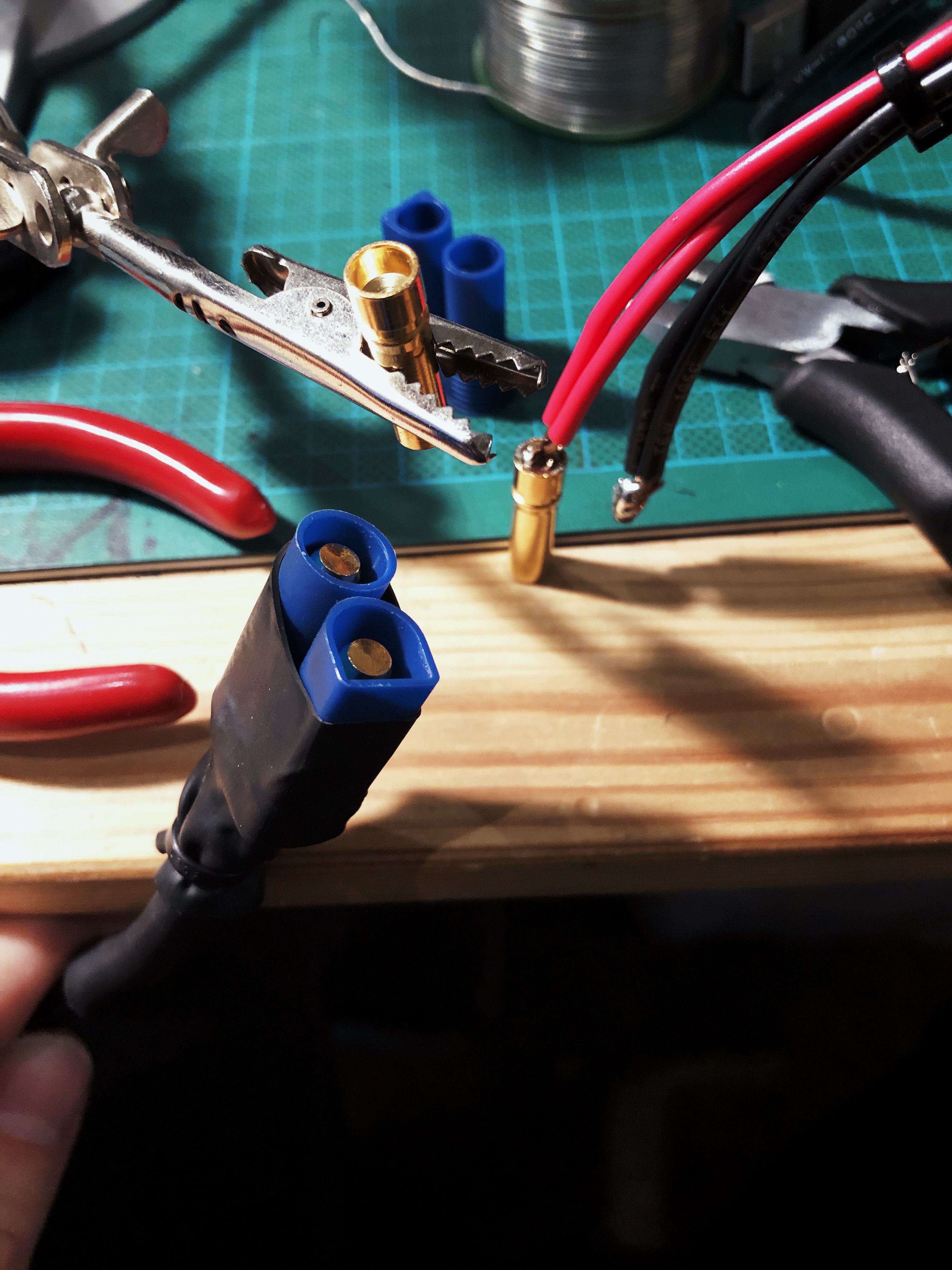
Ugh, backwards again
Every time I have to solder one of these I end up with the wrong plug on the wrong cable. The fact that the male metal plug goes in the female plastic plug confuses me. At least positive/negative are on the proper side, just don't connect a battery directly to a power supply or another battery by mistake.
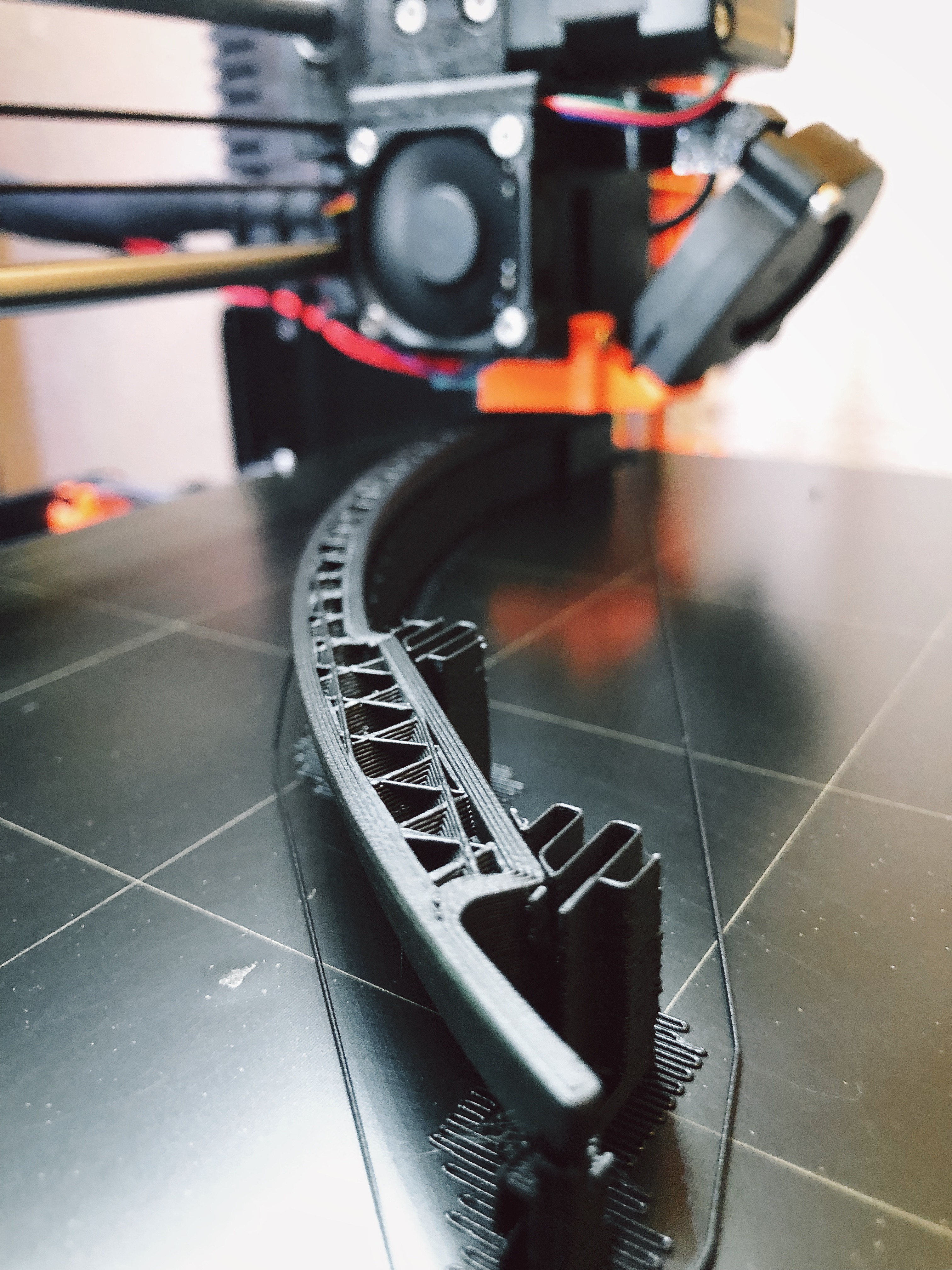
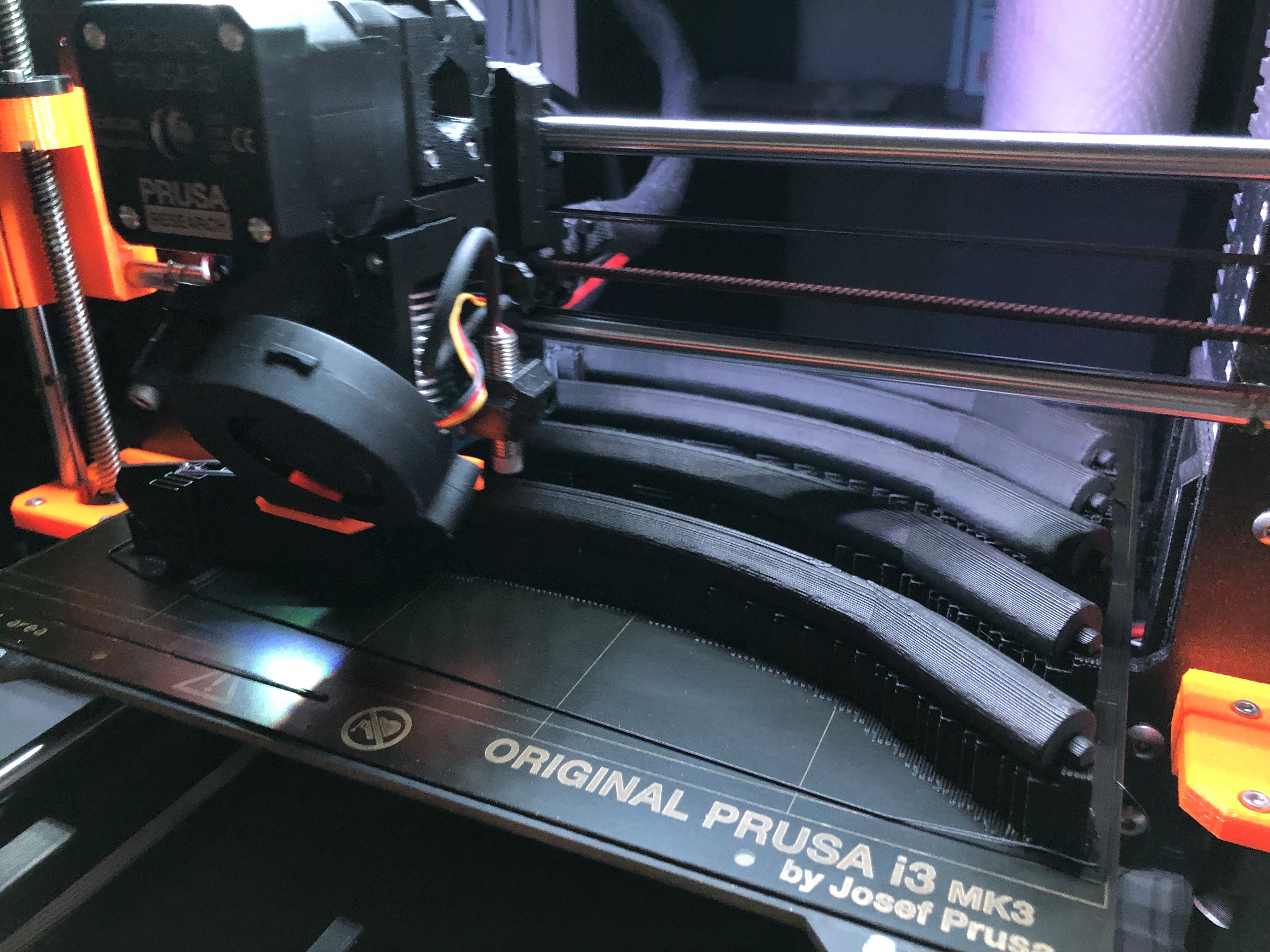
First solo test print10 hours into the remaining 5 tibias printThis is heavier than I thought it would be
I started to be scared that the servos wouldn't be strong enough at that point. I really ended up being heavier that I thought. I still have to eventually stick a computed on it's back and a battery inside of it. I could have made all the calculations in advance, but where's the fun in that?
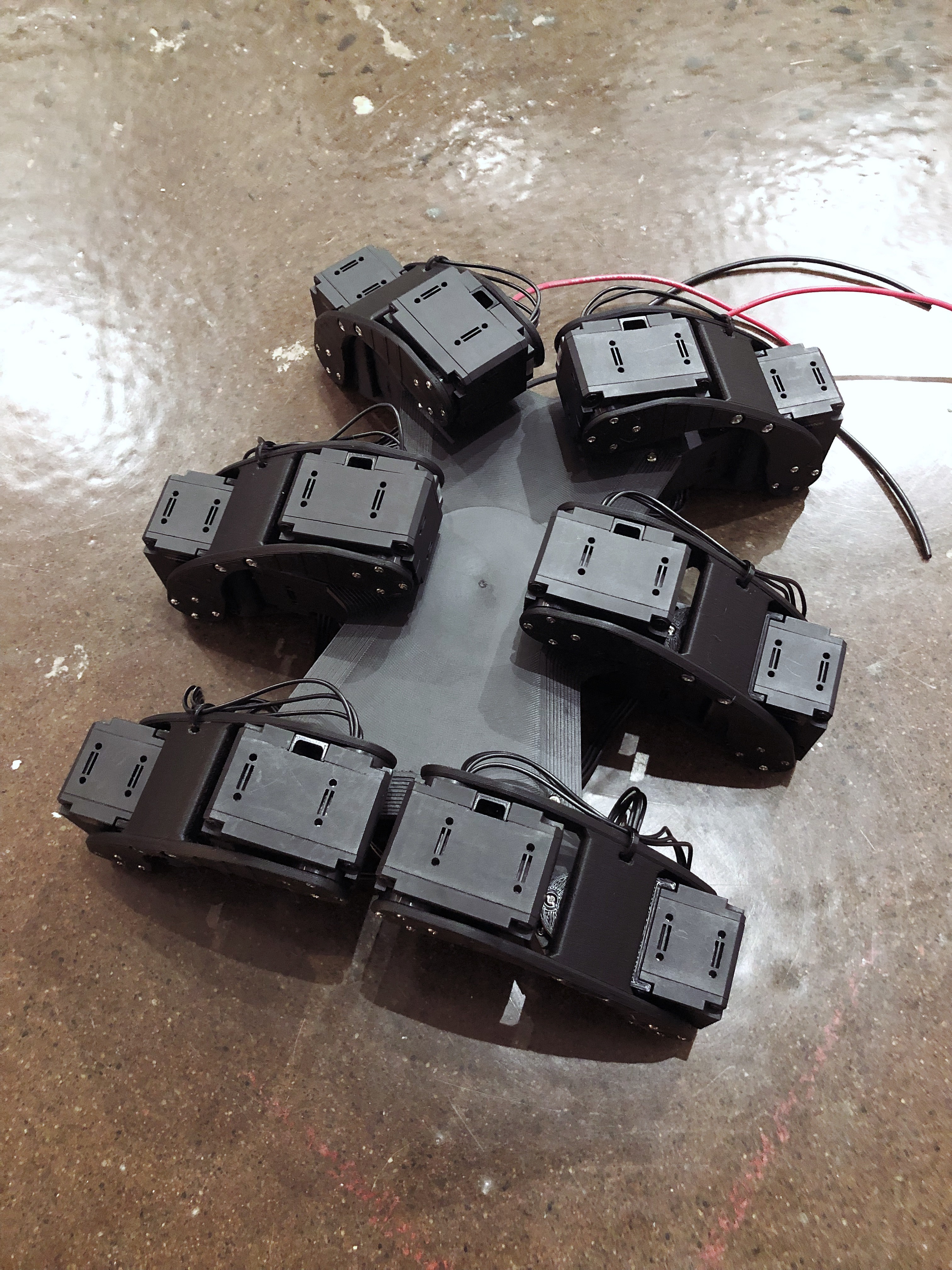
The tibias are too long
Seeing it outside of Fusion360 for the first time I realize that the tibias a too long. It's not a practical position to start from in order for it to stand up. It can't bring the legs closer to the body like this and will use more energy getting up. It will also have to reposition its feet before walking as this is probably too wide of a stance to start with.
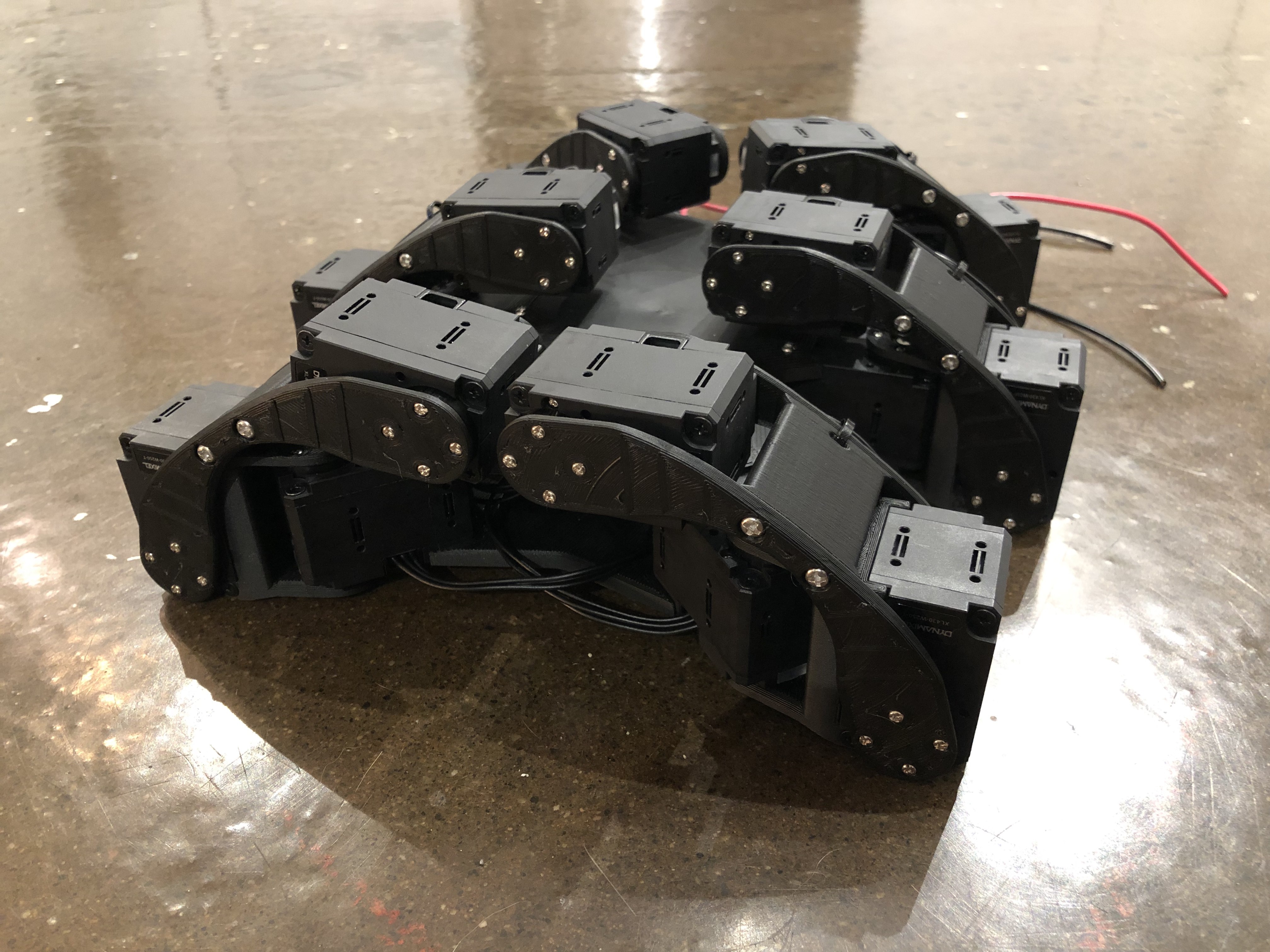
I must admit that I love the block-ish industrial machine look it has without the tibias. I have to revisit my design to be more in line with what I'm seeing here. I first thought I would go with a semi-organic insect look but this convinced me to go full sci-fi robot on my next design iteration.Trying to do smooth curves in the Z axis with 0.3mm layer height
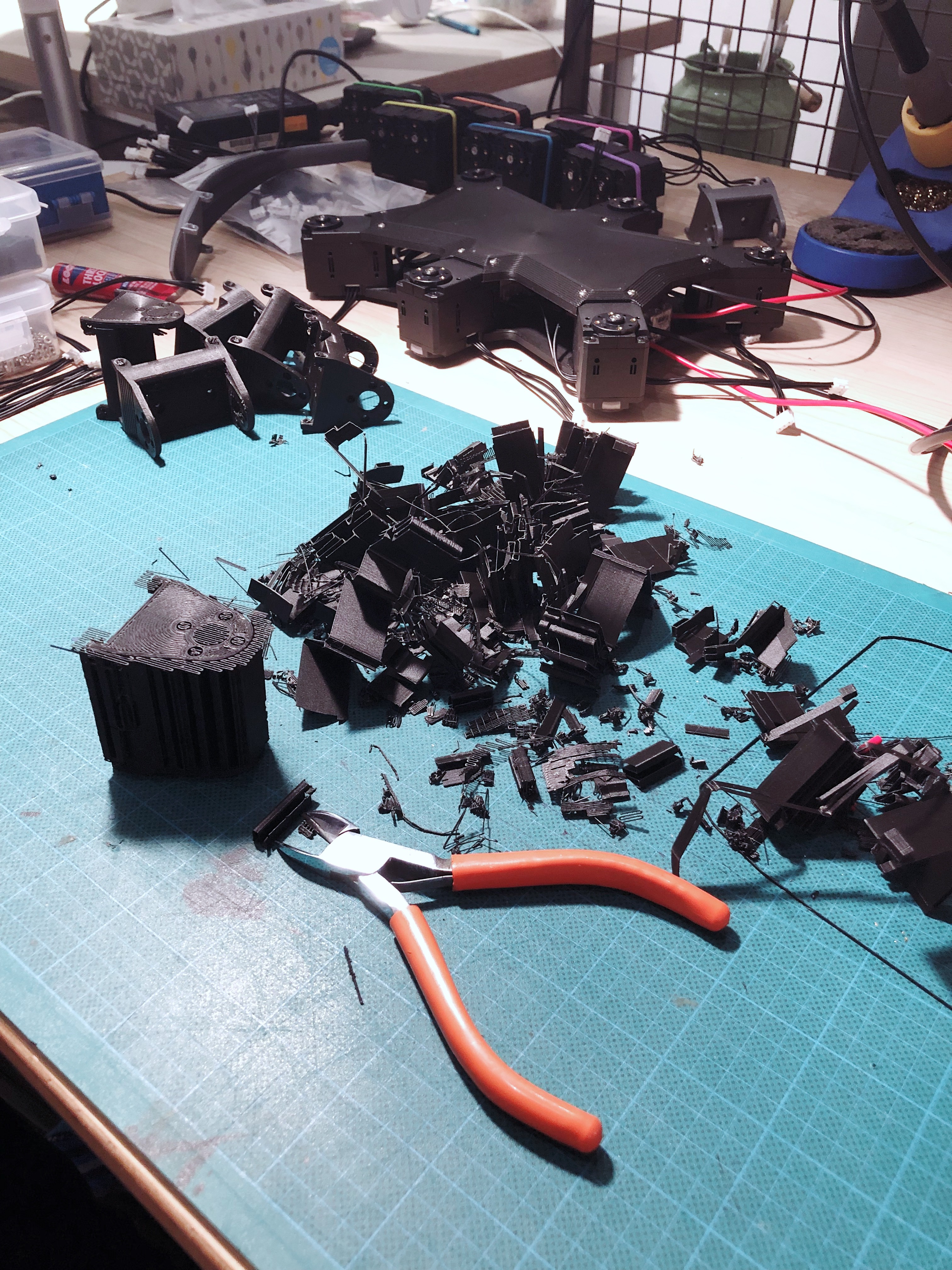
Such a long print with all that supportRemoving the support is so relaxingThere are pieces of support material all over my apartment now.I like the look of this
Unfortunately, I had designed the parts with enough clearance for a 0.2mm print but I decided to go with 0.3 at the last minute. So the slicer didn't round the values in my favor everywhere and I had to remove material with a knife to make the femur motor fit. Some screw holes even cracked as I was putting the screws in. It looks like it still holds for now but I definitely have to add more material around the coxas side tabs and maybe print in the other direction to make them stronger over the servo horn ones.
2019-03-30 Printed and assembled the body during the weekend.
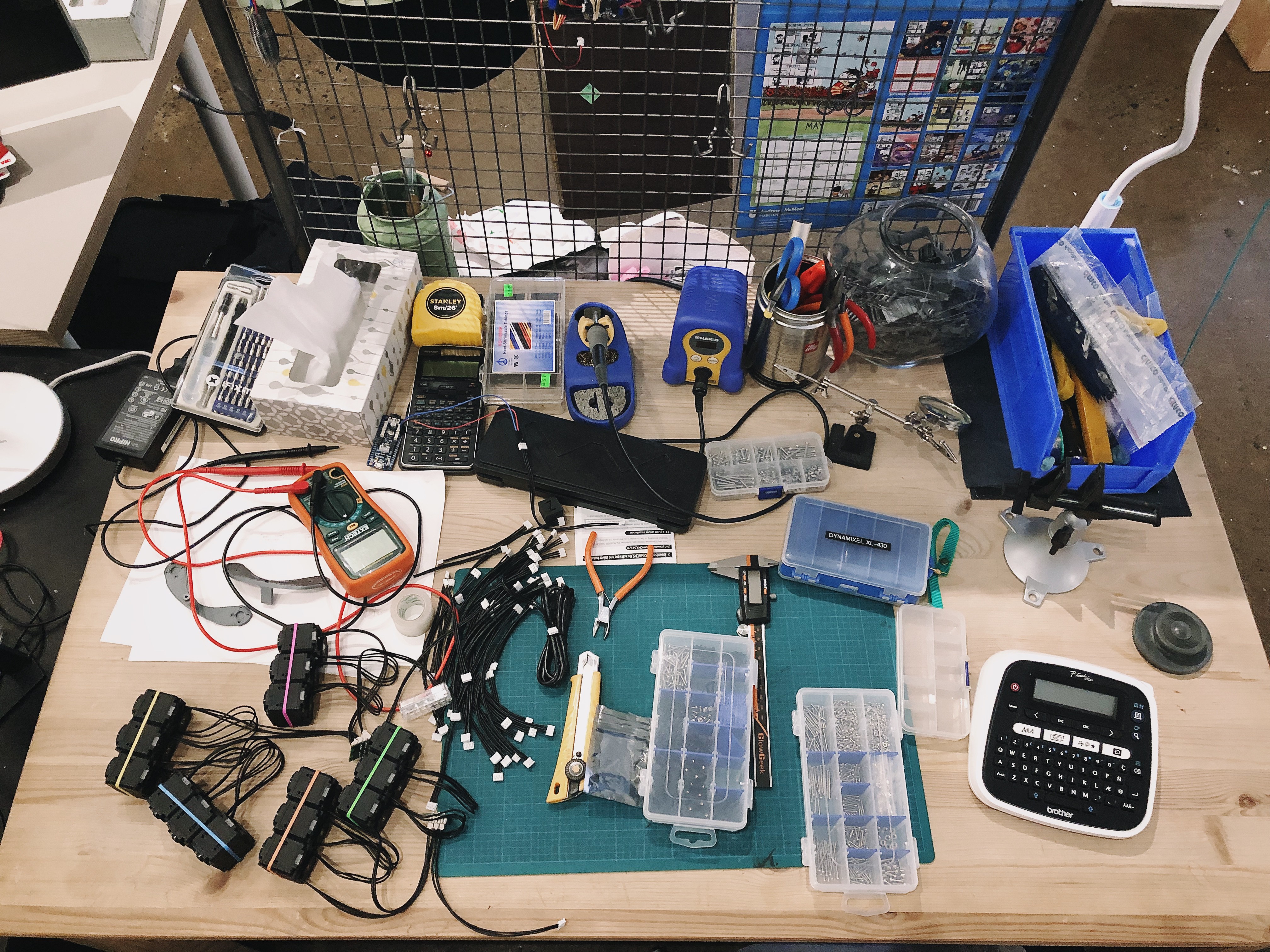
The kind of mess that I work with.All of this is boiling with potential.
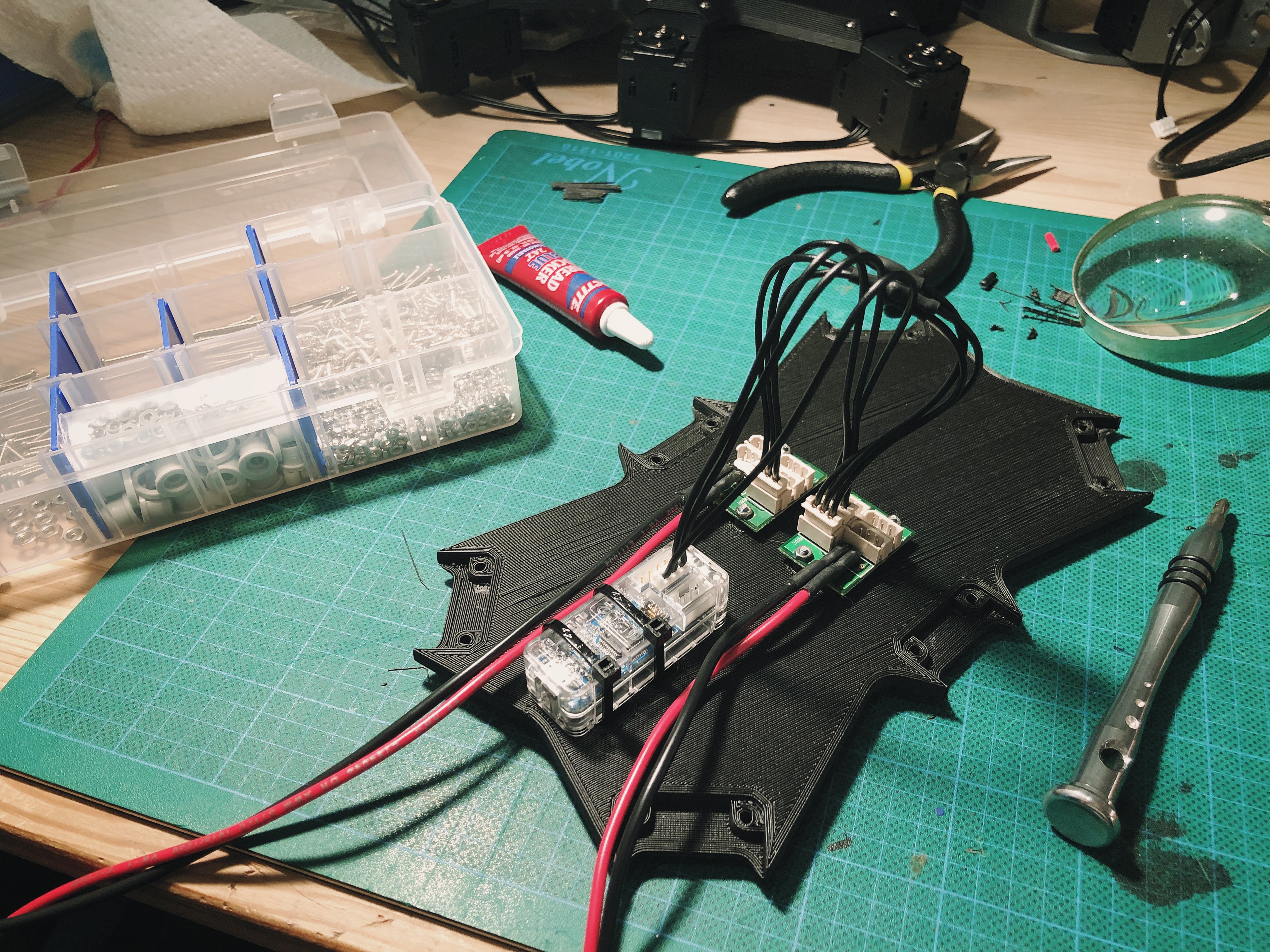
Soldered the power distribution to make headers that I hacked into the original board
I didn't trust the original cables to be beefy enough for the power required to handler the load on 9 servos per board, so I replaces a connector with male headers onto which I soldered my power distribution. It will eventually have to change as my final goal is to have it run untethered with an on-board battery.
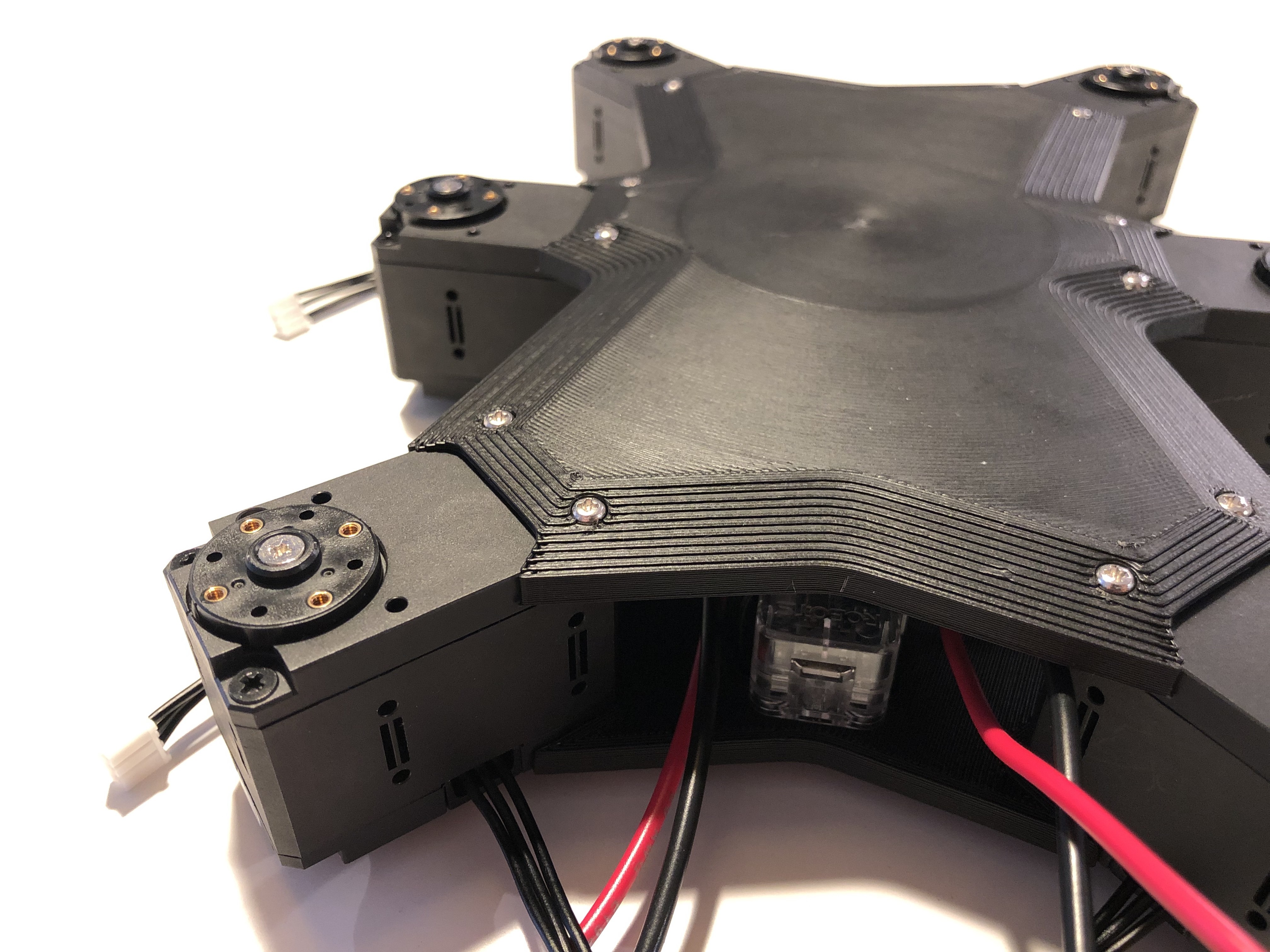
The 0.3mm print really shows on parts like these
The finish on a 0.3mm print is not that great but I wanted my parts to be more solid. On a positive note, the matte black PLA from ColorFabb looks so good!
2019-03-28 Started testing, numbering and grouping motors by leg.
Evaluating how everything will be connected inside the bodyI kind of like the rubber band colors on the motors. Maybe I'll try introducing a bit of color in the final designWith a small work surface I have to tidy up pretty often. I wonder if I'll have enough room for the robot to stand.
 François Ubald Brien
François Ubald Brien















 I don't know why, I always enjoy having a bunch of similar objects that pack nicely together.
I don't know why, I always enjoy having a bunch of similar objects that pack nicely together.