 pacogarcia3
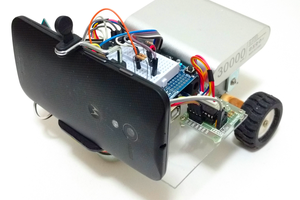
pacogarcia3My objective was to deliver practical movement of objects for lightweight use cases. This is a very flexible design that can be strengthen and improved easily.
I have effectively tested this to 1m and it is extremely reliable for light objects.
It works extremely world with Single Camera Computer Vision.
Summary Specs:
0.88 lbs (0.4 kg) tested max payload Vertical travel Z-axis: 6.8 inches (17.3 cm) Reach Y-axis: 10.2 in (26 cm) Customizable Horizontal travel X-axis (3.3 ft (1 m) as tested.
Project Overview:
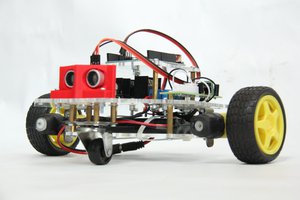
Machine in Action:
https://youtu.be/f3s_uub4P6Q
Capability Specs:
https://www.fdxlabs.com/products/horizontal-travel-robot-arm-hta0/hta0-tech-specs/
Bill of Materials, Kit, Assembly Instructions:
https://www.fdxlabs.com/products/
Code:

 igorfonseca83
igorfonseca83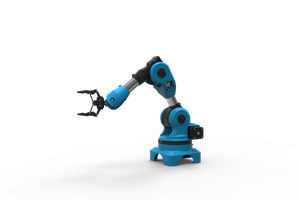
 M.Frouin
M.Frouin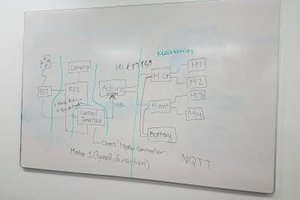
 shamylmansoor
shamylmansoor
I'm interested in creating something like this for my final year project! Any tips sir?