 M.Frouin
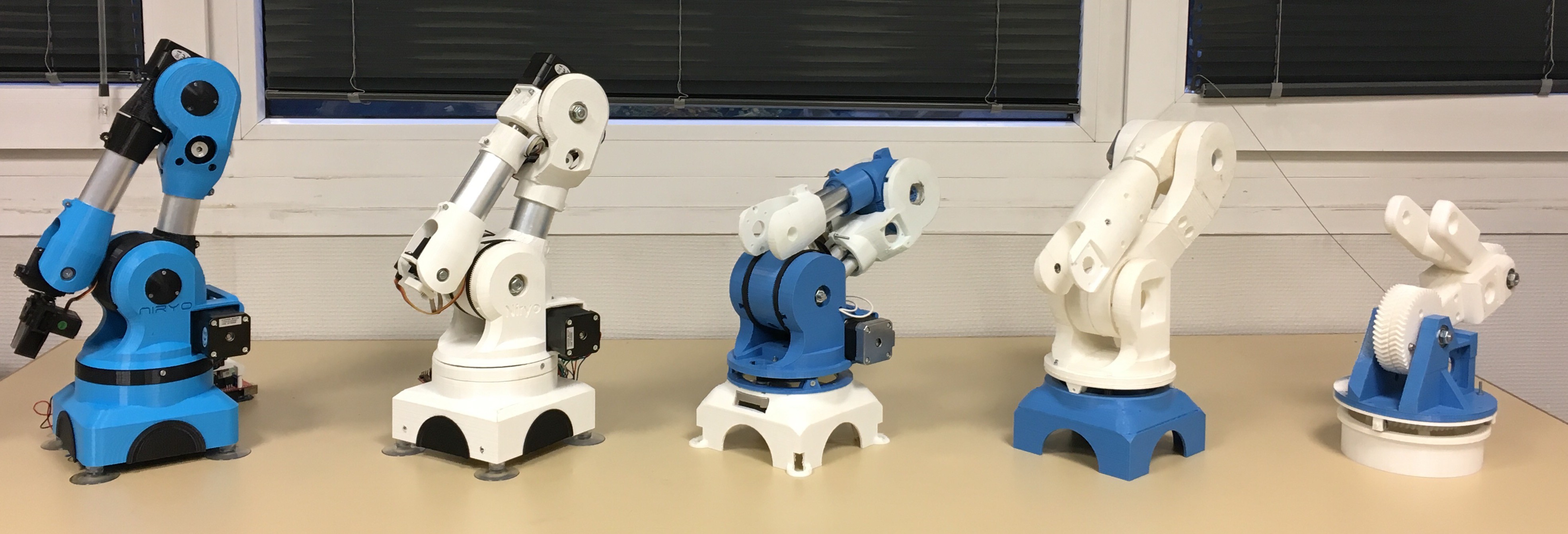
M.FrouinMore and more projects around desktop robotic arms have emerged but nothing really accessible and complete for us. That's why we are developing "Niryo One", using all the technologies in a 3D printer (Ramps, Stepper motors, ...) but with a huge improvement due to the Raspberry Pi 3. In fact all the intelligence will be inside this board with Robot Operating System (already used in industrial robots like Universal Robot).
There is an high potential of having a robotic arm at home. You can do everything that you imagine and develop real applications like making coffee in the morning, drawing, using many tools, catching ball etc....
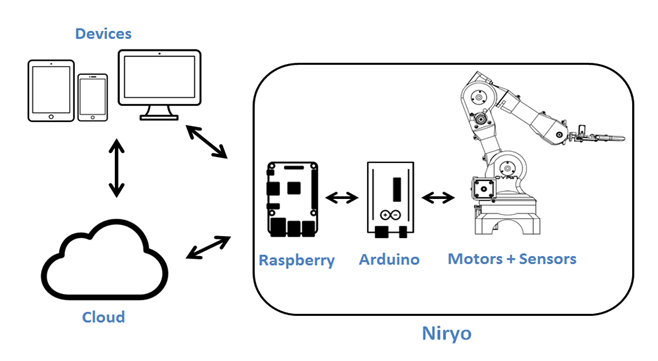
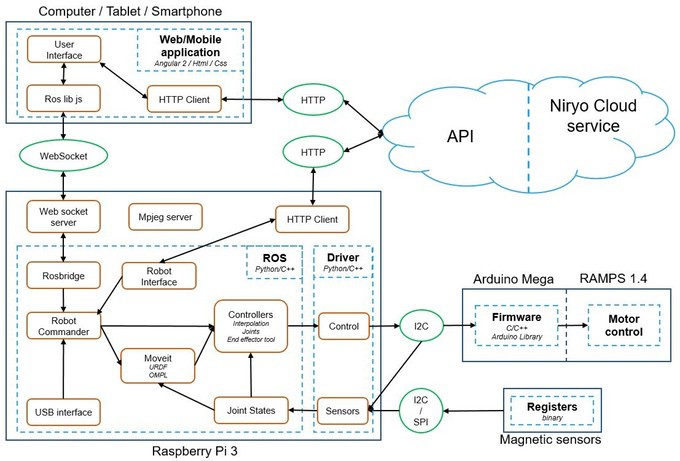
The robot will be able to communicate with the cloud or a smartphone/computer. That will allow the software to be continuously upgraded. The arm could be connected with other smart objects and be controlled from a web/mobile application, or directly by programming on it.
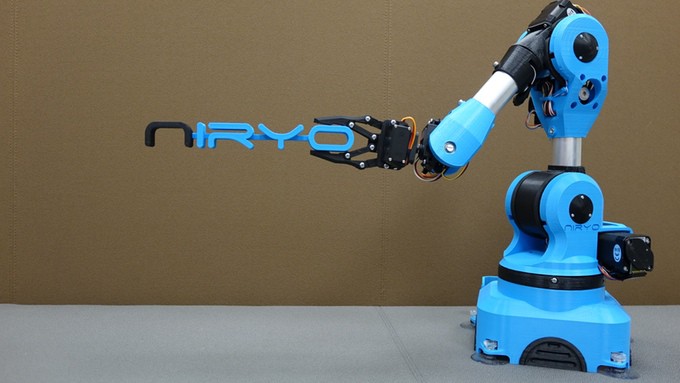
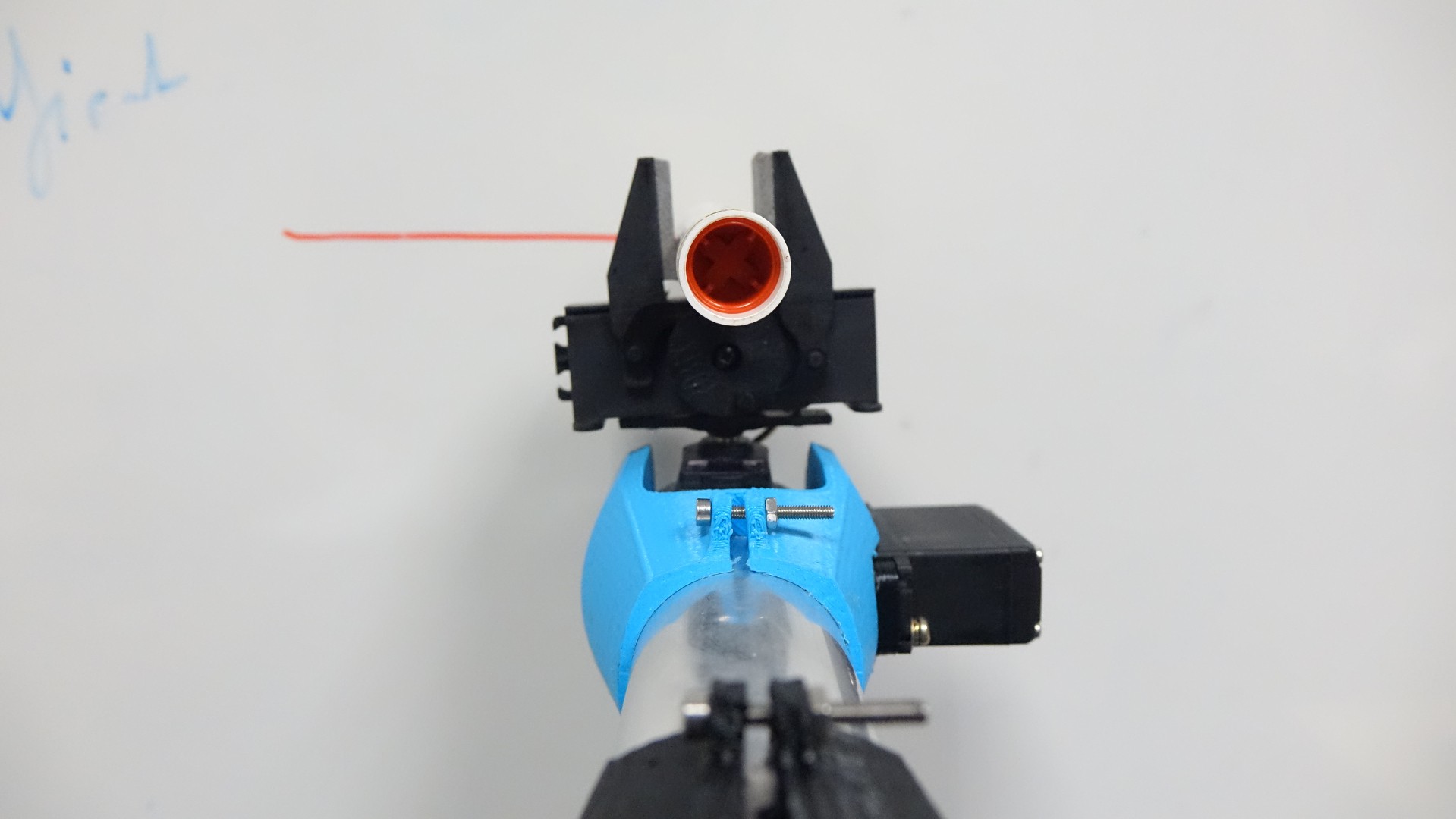
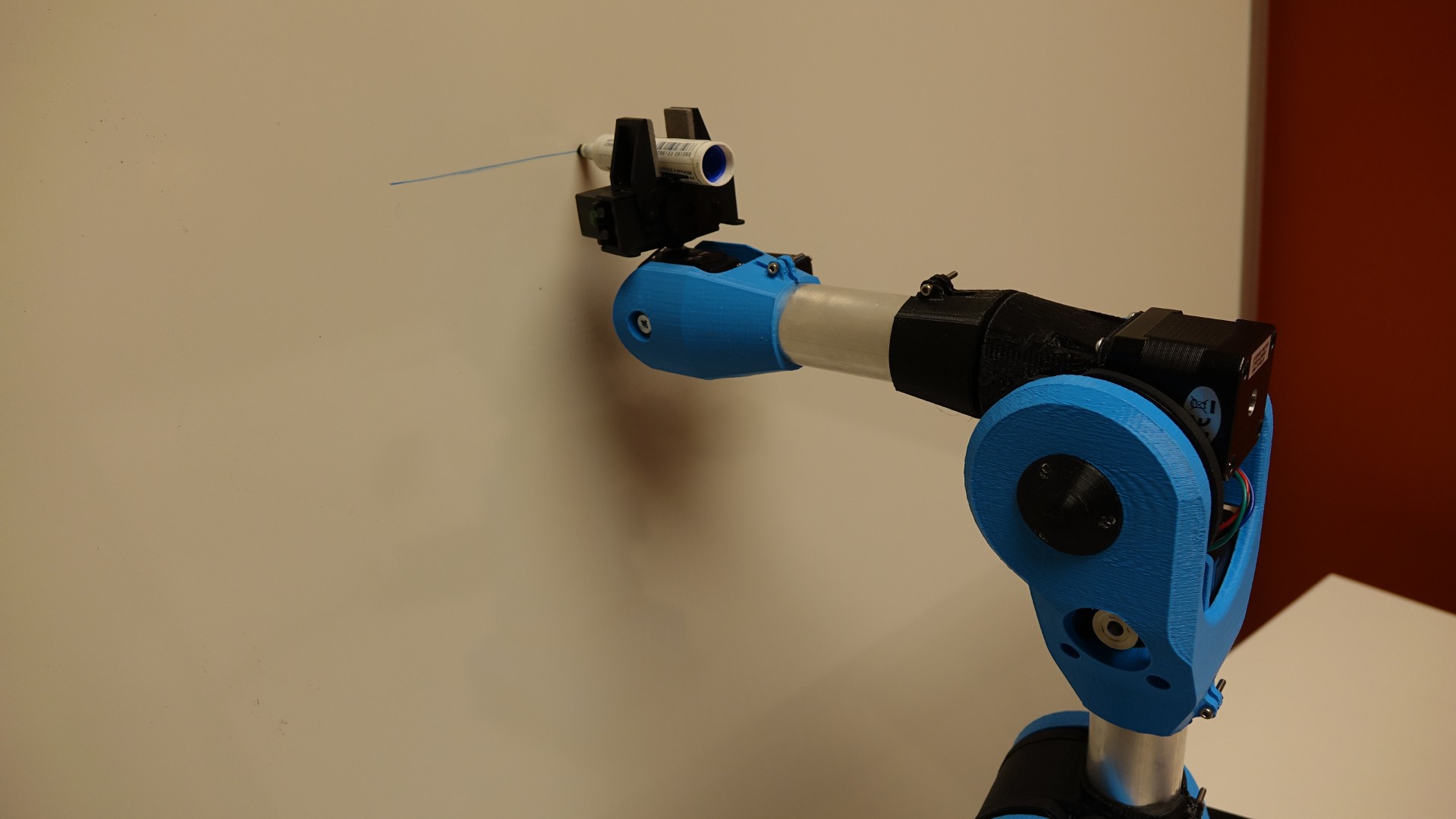
This video shows the 5th prototype picking a pen:
For this project we are using:
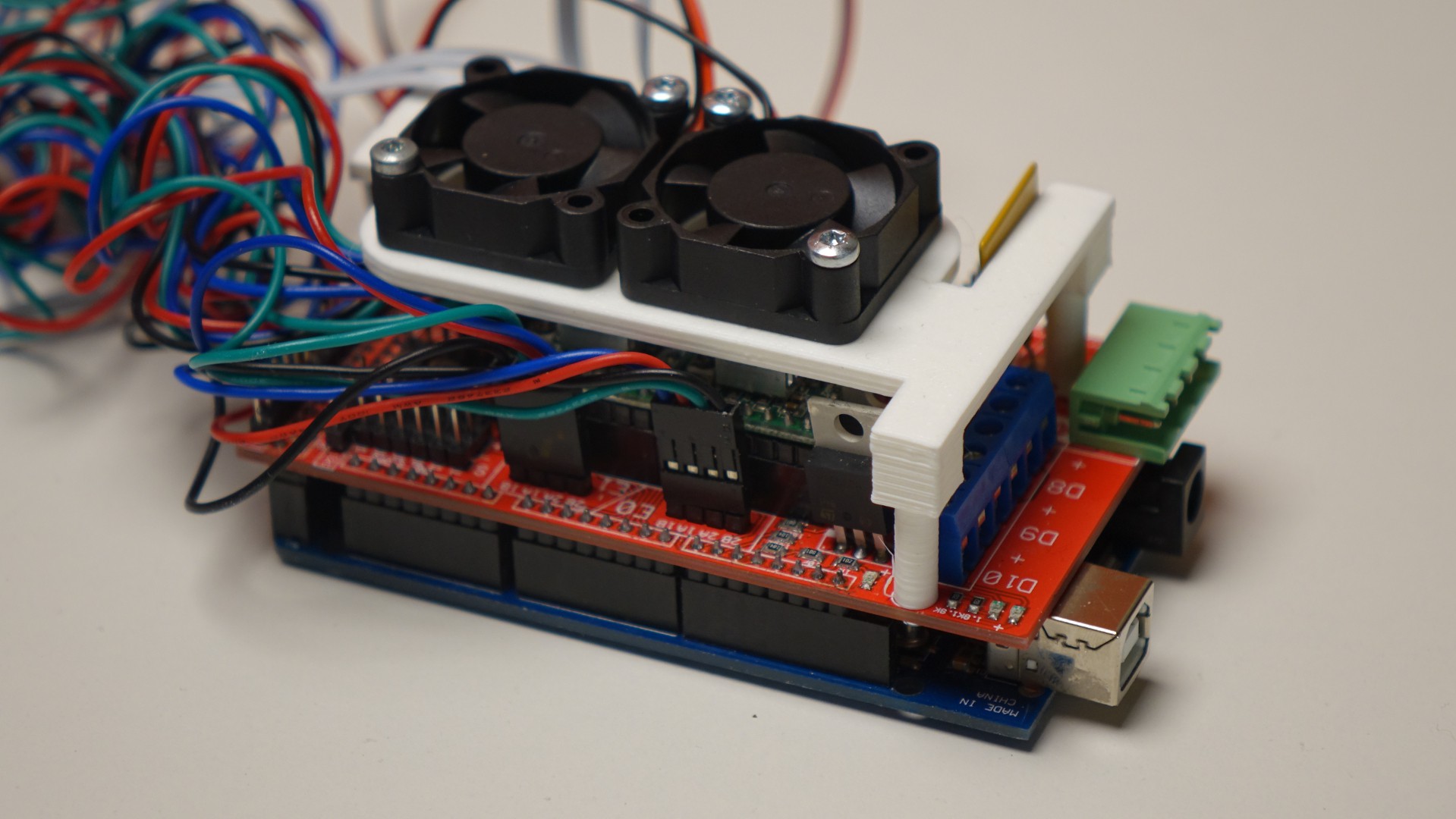
-The best open-source electronics platforms such as Arduino, Raspberry pi and all the hardware already developed for 3D printing like: steppers motors, driver A4988, RAMPS 1.4.
-3D printing for all the mechanicals parts, (compared to some other processes, that allows quick evolution in the future)
-The famous and open-source Robot Operating System for the programming part (ROS) .
-Simple interface on Smartphone, PC, gamepad or mouse.
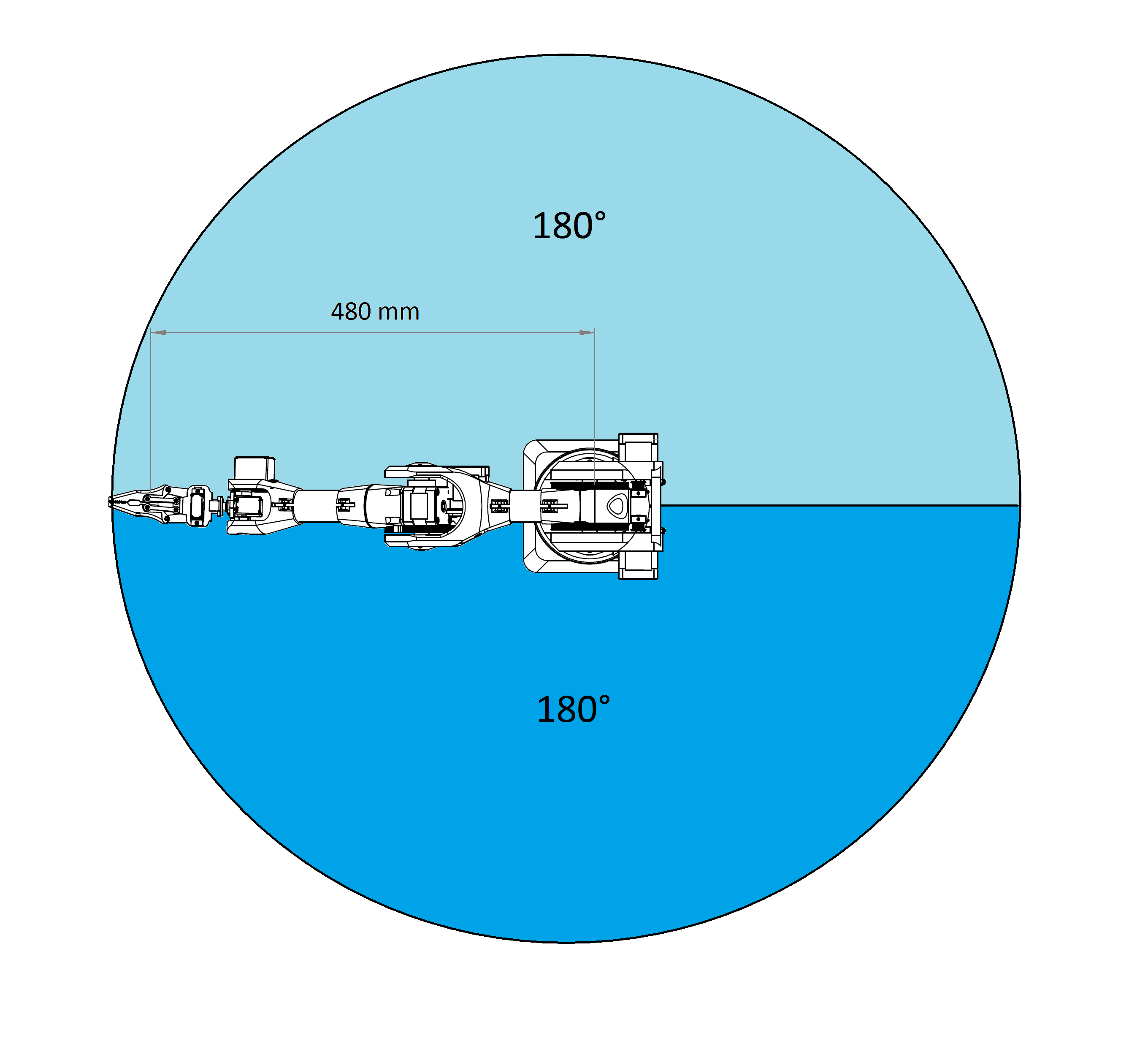
We want to create a very easy-to-use robot with a high accuracy of 0.5mm.
The project will be open-source to be sure that everyone can add some code, skill, functionality, usage, tools....
We - and you - can find a lot of usages with some imagination.
In the future we want to implement a camera device around this robot.
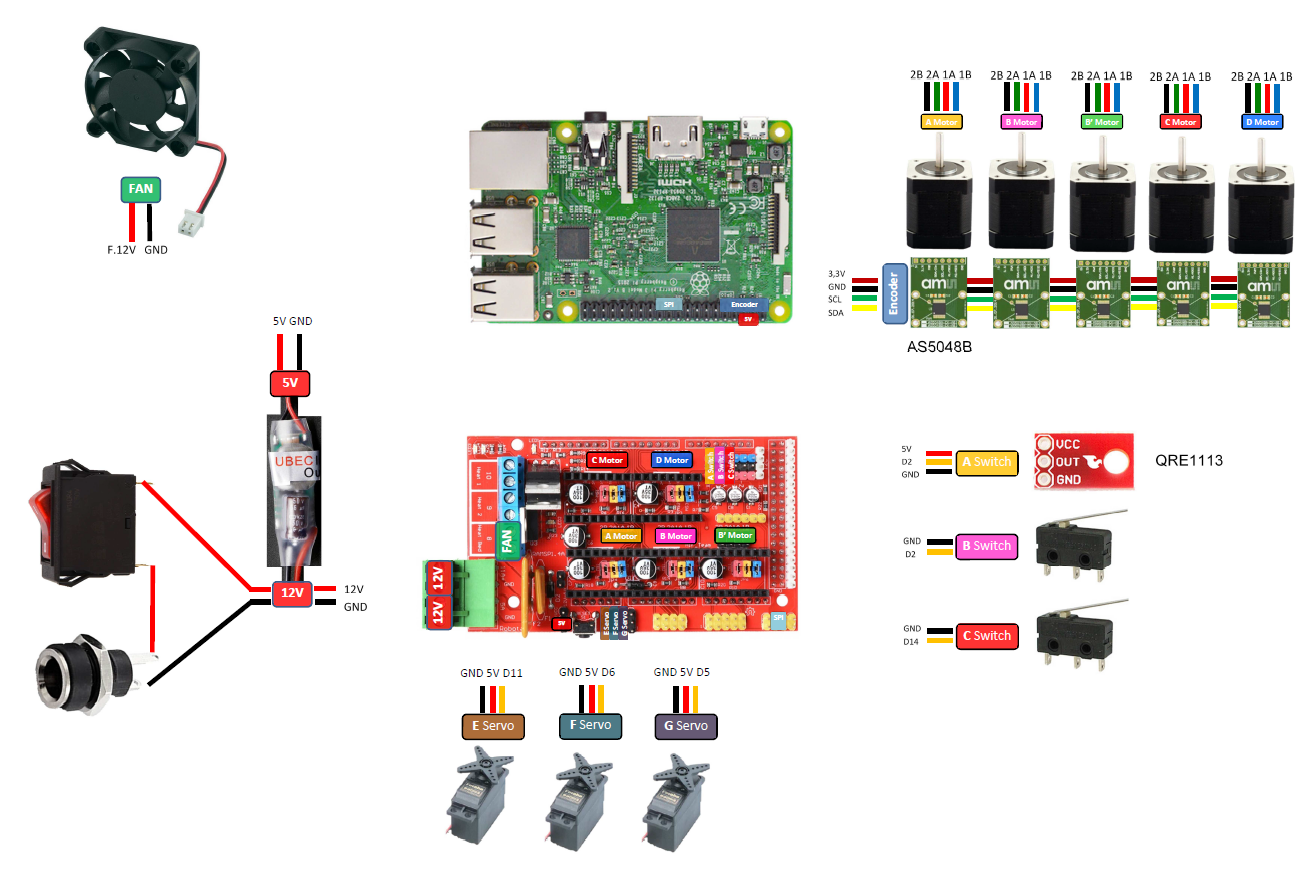
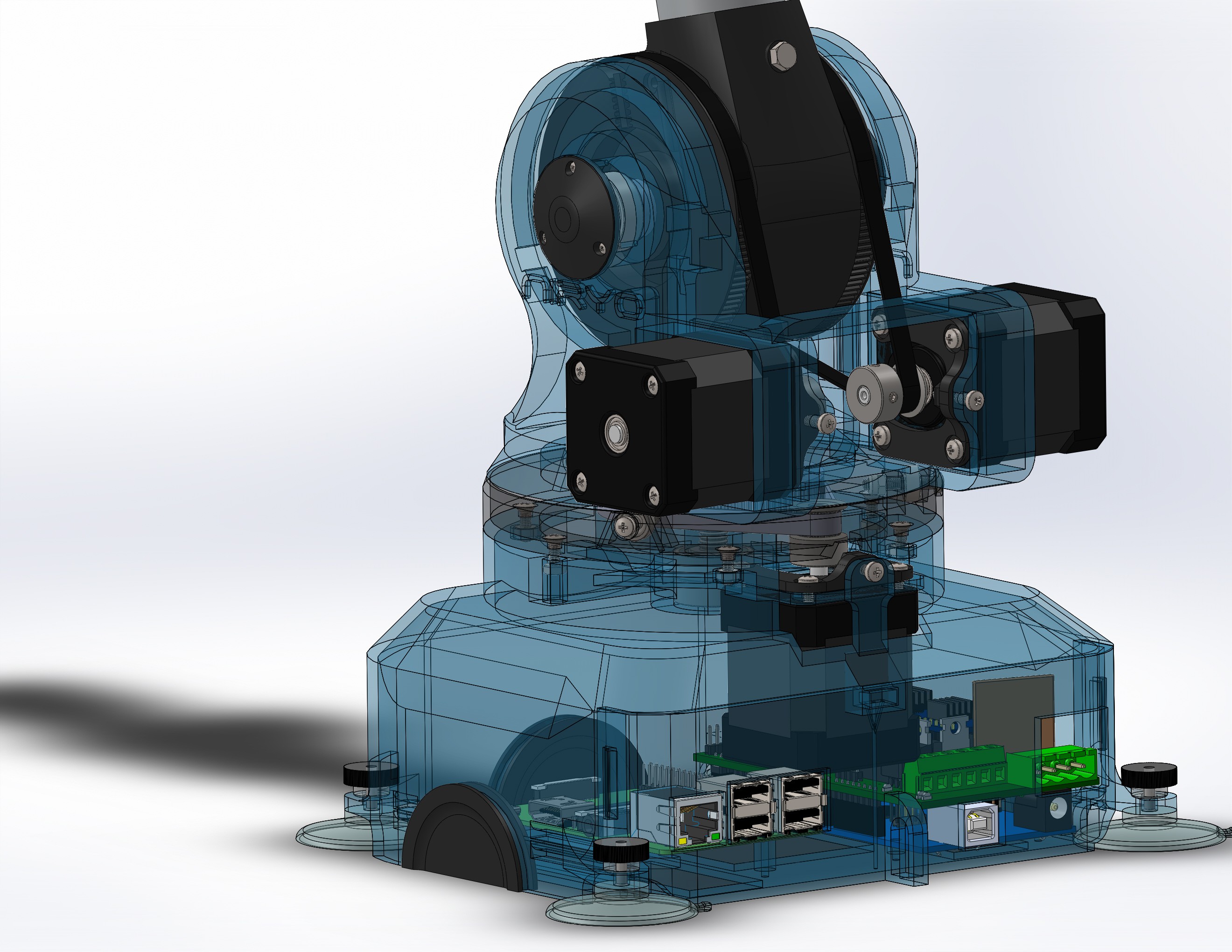
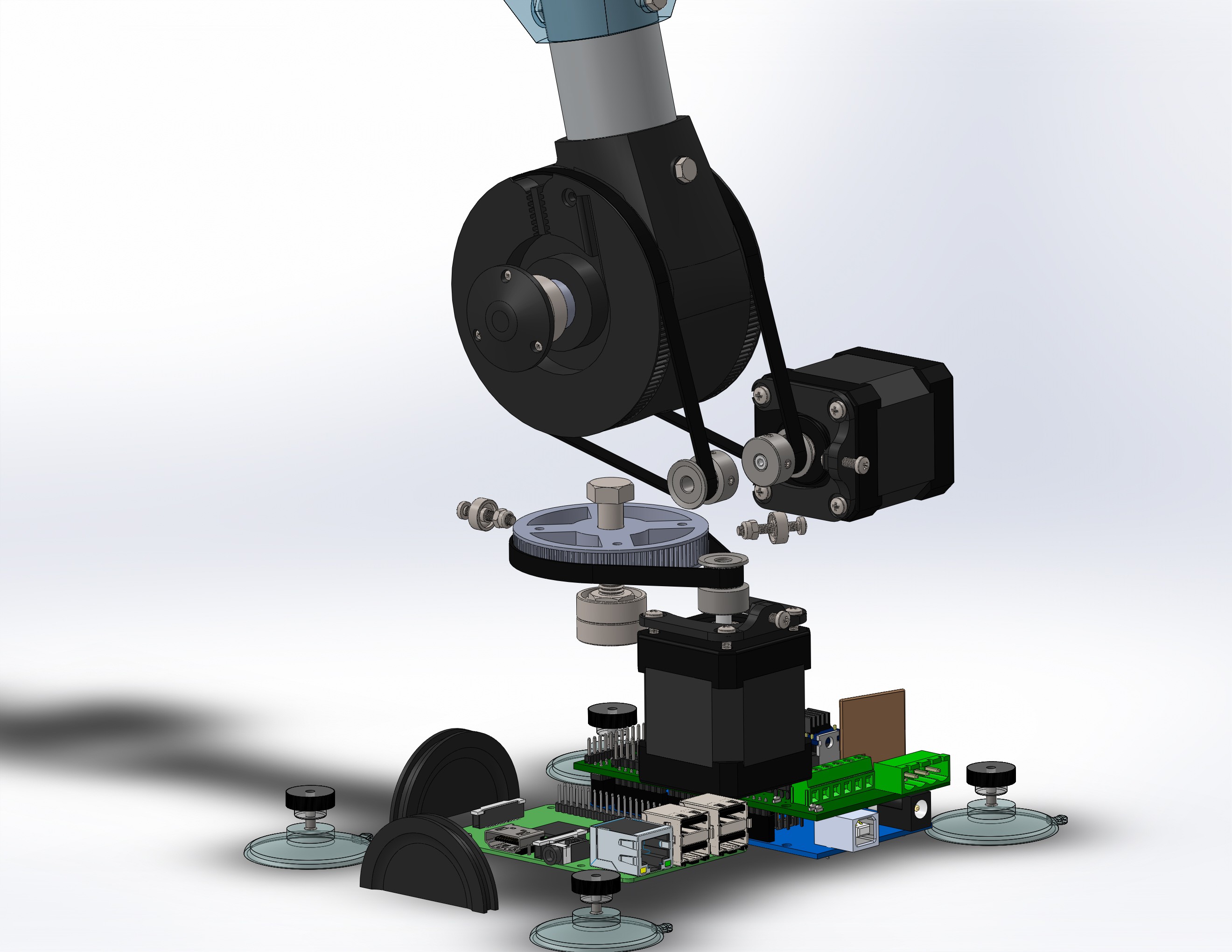
The electronic is quite simple. All the motors, servos, fans, end-stop switches are connected to the Ramps 1.4.
The connection between Arduino and Raspberry Pi 3 is using I2C protocol.
Encoders communicate through I2C with the Raspberry PI.

















 alisa.wu
alisa.wu

 Pascal Buerger
Pascal Buerger
 Afreez Gan
Afreez Gan
Hi
Edouard Renard, really nice work, but where can i get the stl files and the code