0%
0%
Mr. Echolocation
Figure designed around the ATtiny84a, the ultrasonic distance measuring transducer and a 1.3" OLED display
 Sander van de Bor
Sander van de BorBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 Manuel Tosone
Manuel Tosone
 Coffeekin
Coffeekin
 Neil Mundt
Neil Mundt
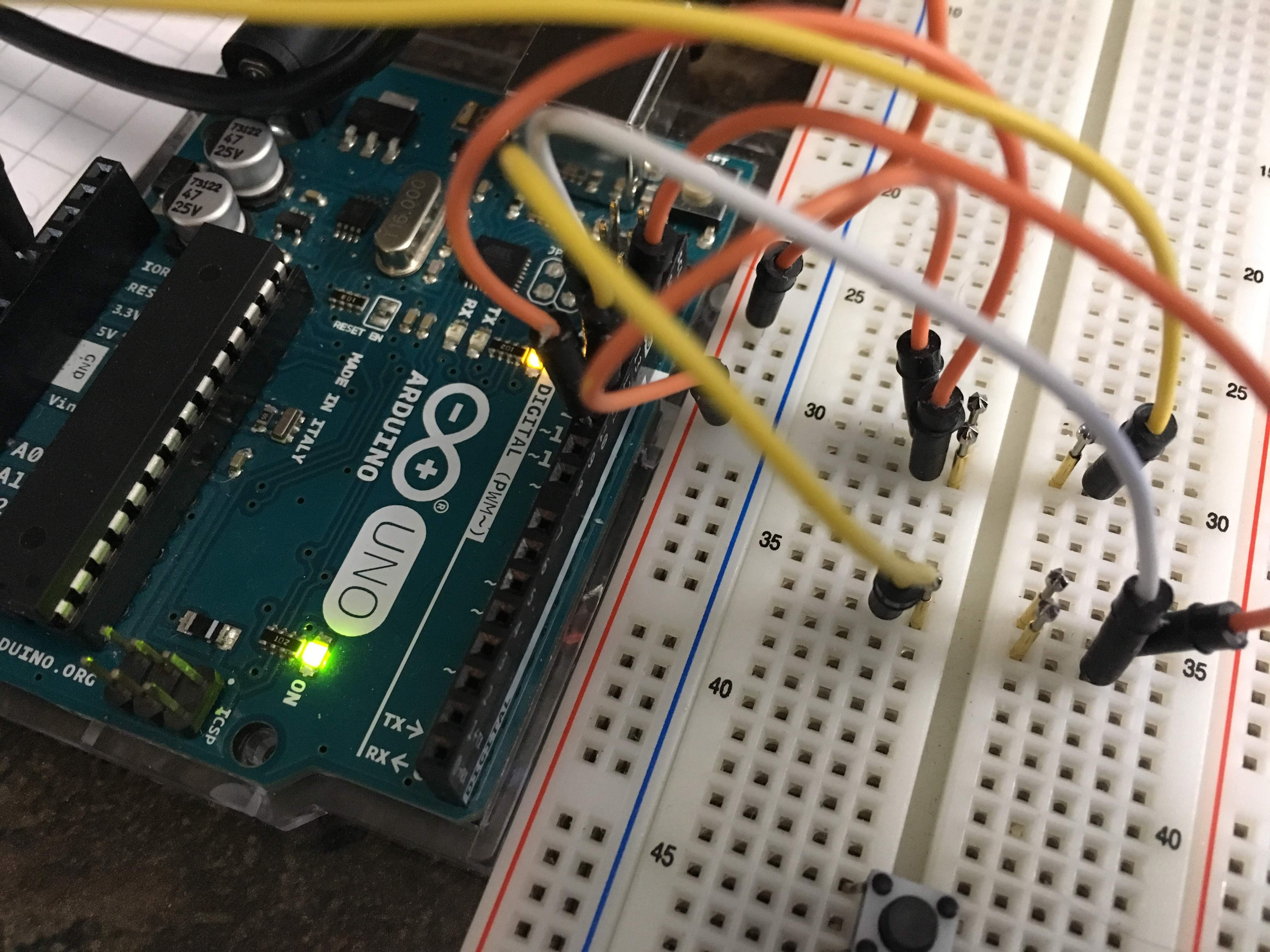
Turning this into a little person is a great touch! What is a proof-of-concept on the beadboard comes alive with some creative arms and legs ;-)