 Sander van de Bor
Sander van de Bor-
1Set the clock and upload the sketch
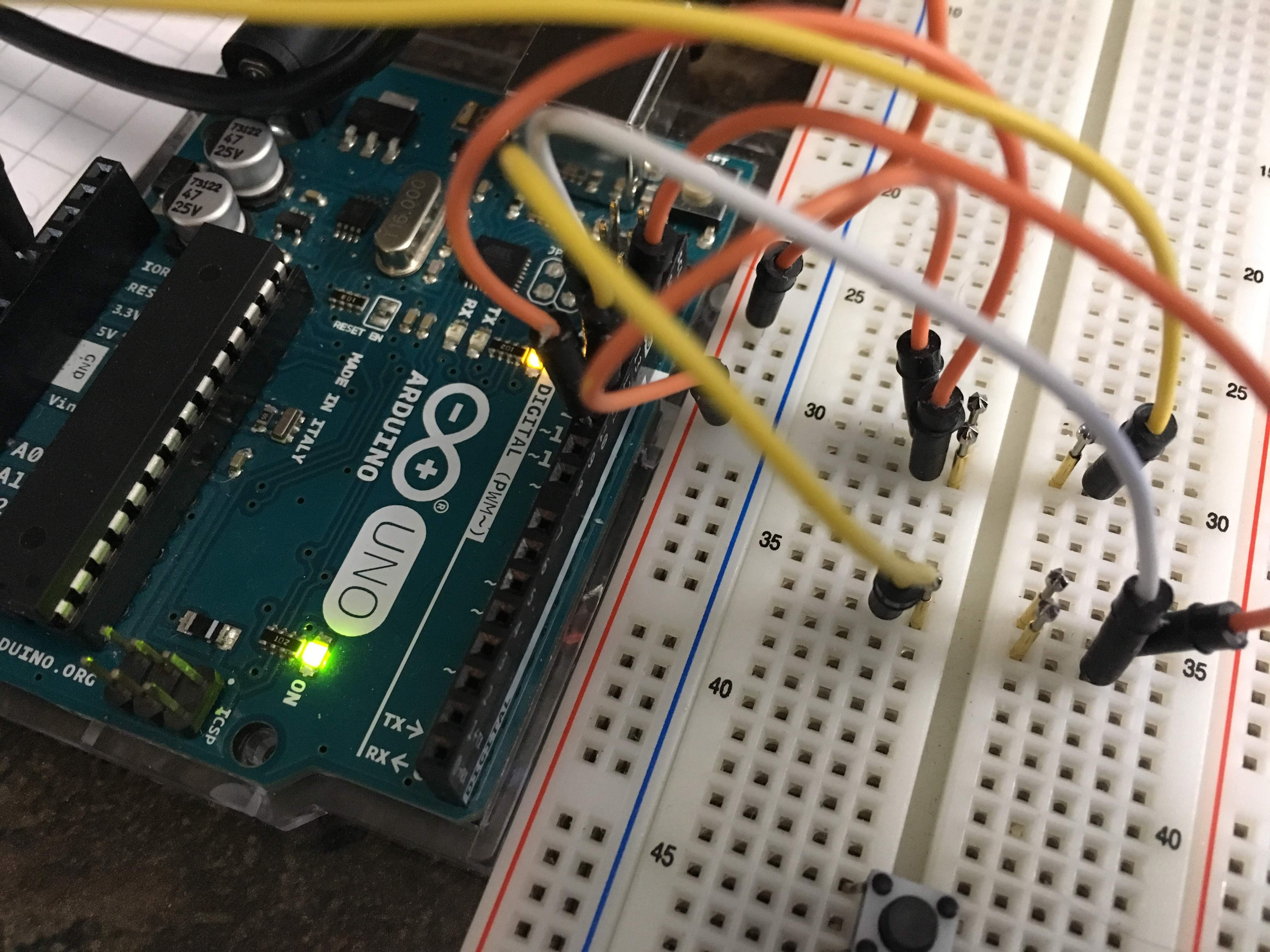
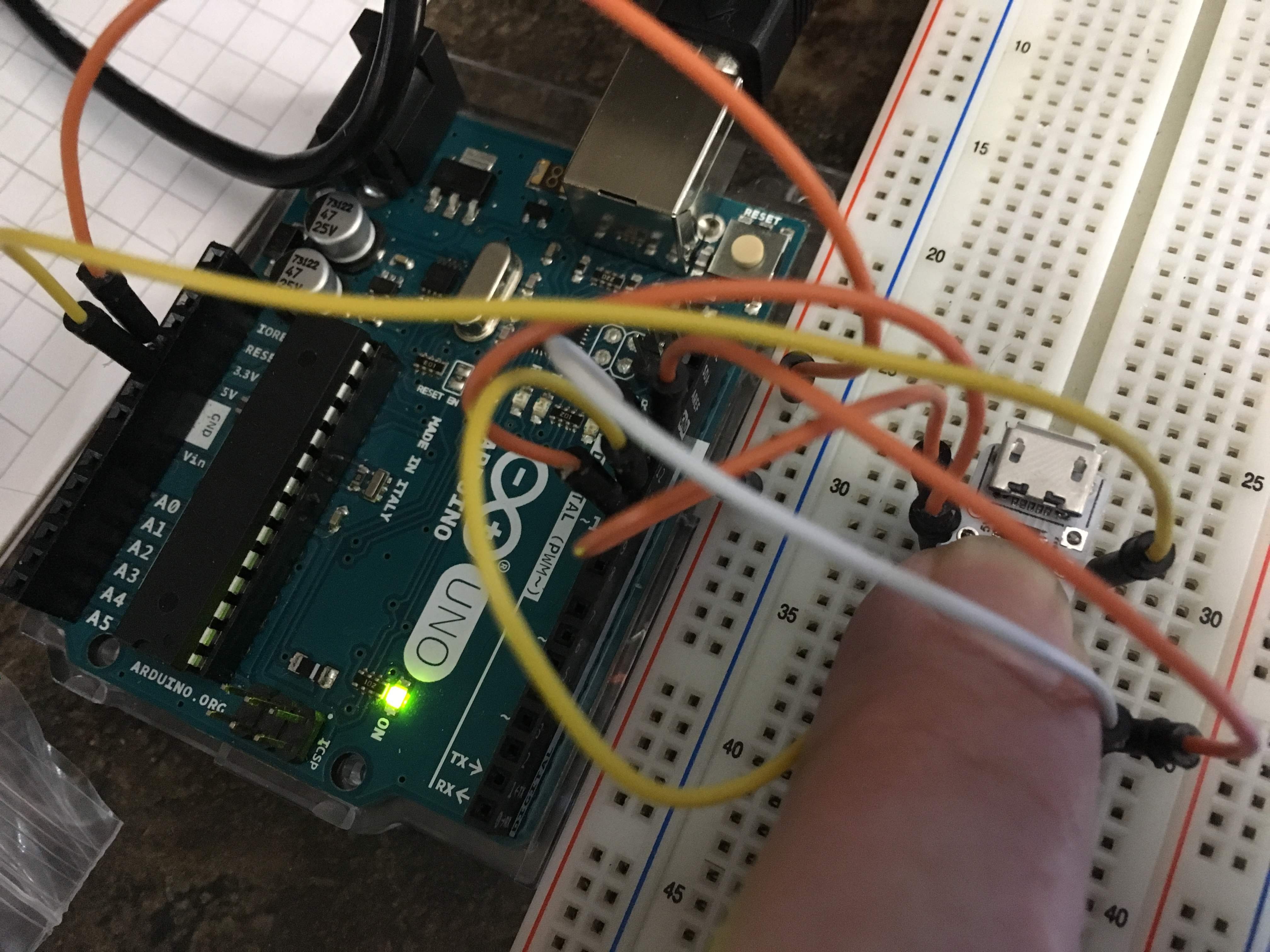
Upload the sketch using the Arduino UNO as SPI programmer. Use 1mm diameter pogo pins to connect to the board:
![]()
![]()
Make sure to burn the bootloader with the clock set to 8MHz (internal). Compile the following sketch with LTO enabled (sketch will be too large when LTO is not used):
#include <Arduino.h> #include <U8x8lib.h> #include <NewPing.h> #ifdef U8X8_HAVE_HW_SPI #include <SPI.h> #endif //U8X8_SSD1306_128X64_NONAME_4W_SW_SPI u8x8(/* clock=*/ 5, /* data=*/ 4, /* cs=*/ 1, /* dc=*/ 2, /* reset=*/ 3); U8X8_SH1106_128X64_NONAME_4W_SW_SPI u8x8(/* clock=*/ 5, /* data=*/ 4, /* cs=*/ 1, /* dc=*/ 2, /* reset=*/ 3); #define TRIGGER_PIN 7 // Arduino pin tied to trigger pin on the ultrasonic sensor. #define ECHO_PIN 8 // Arduino pin tied to echo pin on the ultrasonic sensor. #define MAX_DISTANCE 200 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm. NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. char tmp_string[5]; long voltage; void setup(void) { pinMode(6, OUTPUT); pinMode(9, OUTPUT); digitalWrite(6, HIGH); digitalWrite(9, LOW); u8x8.begin(); u8x8.setPowerSave(0); } void loop(void) { //read and convert the voltage to a decimal voltage = readVcc(); double decimalVoltage = doubleMap(double(voltage),0,6000,0,6); //u8x8.setFont(u8x8_font_chroma48medium8_r); unsigned int uS = sonar.ping(); // Send ping, get ping time in microseconds (uS). u8x8.setFont(u8x8_font_amstrad_cpc_extended_r); //u8x8.setFont(u8x8_font_profont29_2x3_r); u8x8.setCursor(10, 7); u8x8.print(decimalVoltage); u8x8.drawString(14, 7, "V"); if((uS / US_ROUNDTRIP_CM) == 0){ // do nothing, do not upate display } else if((uS / US_ROUNDTRIP_CM) < 10) { u8x8.draw2x2String(1, 3, " "); u8x8.draw2x2String(5, 3, itoa(uS / US_ROUNDTRIP_CM, tmp_string, 10)); } else if((uS / US_ROUNDTRIP_CM) < 100) { u8x8.draw2x2String(1, 3, " "); //u8x8.print(uS / US_ROUNDTRIP_CM); u8x8.draw2x2String(3, 3, itoa(uS / US_ROUNDTRIP_CM, tmp_string, 10)); } else { u8x8.draw2x2String(1, 3, itoa(uS / US_ROUNDTRIP_CM, tmp_string, 10)); } u8x8.drawString(8, 3, "centi-"); u8x8.drawString(8, 4, "meters"); u8x8.drawString(2, 1, "Distance:"); delay(100); } double doubleMap(double x, double in_min, double in_max, double out_min, double out_max) { return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min; } long readVcc() { // Read 1.1V reference against AVcc // set the reference to Vcc and the measurement to the internal 1.1V reference #if defined(__AVR_ATmega32U4__) || defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) ADMUX = _BV(REFS0) | _BV(MUX4) | _BV(MUX3) | _BV(MUX2) | _BV(MUX1); #elif defined (__AVR_ATtiny24__) || defined(__AVR_ATtiny44__) || defined(__AVR_ATtiny84__) ADMUX = _BV(MUX5) | _BV(MUX0); #elif defined (__AVR_ATtiny25__) || defined(__AVR_ATtiny45__) || defined(__AVR_ATtiny85__) ADMUX = _BV(MUX3) | _BV(MUX2); #elif defined (__AVR_ATtiny87__) || defined(__AVR_ATtiny167__) ADMUX = _BV(MUX3) | _BV(MUX2); #else ADMUX = _BV(REFS0) | _BV(MUX3) | _BV(MUX2) | _BV(MUX1); #endif delay(20); // Wait for Vref to settle ADCSRA |= _BV(ADSC); // Start conversion while (bit_is_set(ADCSRA,ADSC)); // measuring uint8_t low = ADCL; // must read ADCL first - it then locks ADCH uint8_t high = ADCH; // unlocks both long result = (high<<8) | low; result = 1125300L / result; // Calculate Vcc (in mV); 1125300 = 1.1*1023*1000 return result; // Vcc in millivolts }
Mr. Echolocation
Figure designed around the ATtiny84a, the ultrasonic distance measuring transducer and a 1.3" OLED display
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.