 Léonard Dabin
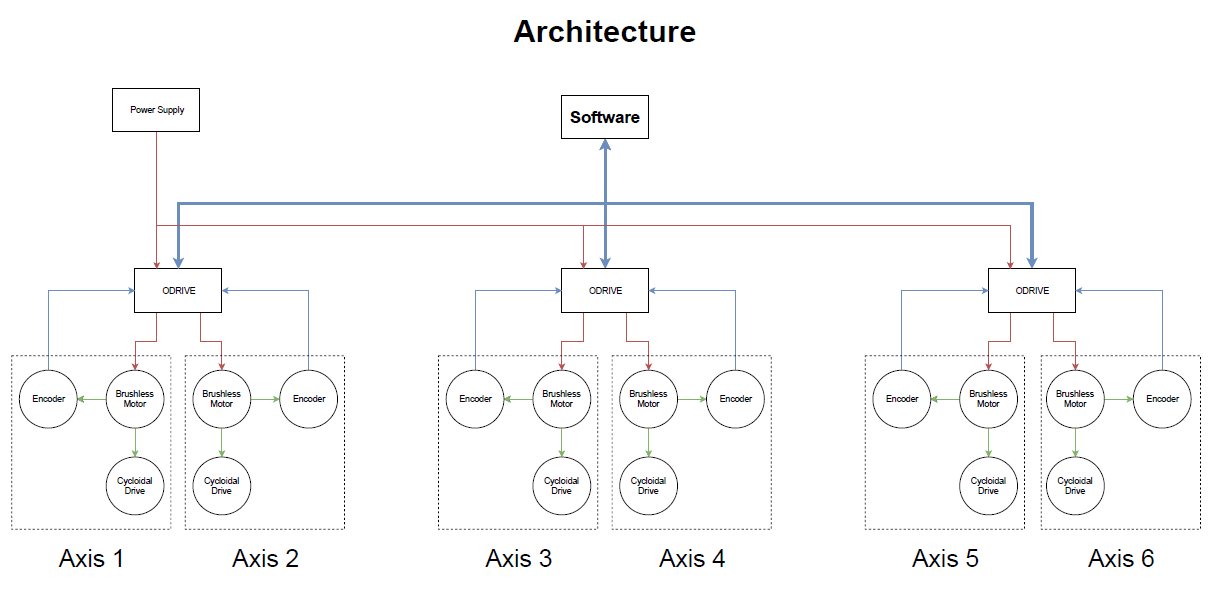
Léonard DabinMACI cobot composed of 6 joints, 3 joints 100 Nm and 3 joints 35 Nm. The joints are controlled thanks to 3 ODrives. Each joint is composed of a brushless motor, an encoder AMT102-V (to see if I change for an AS5048) and a cycloidal reducer.
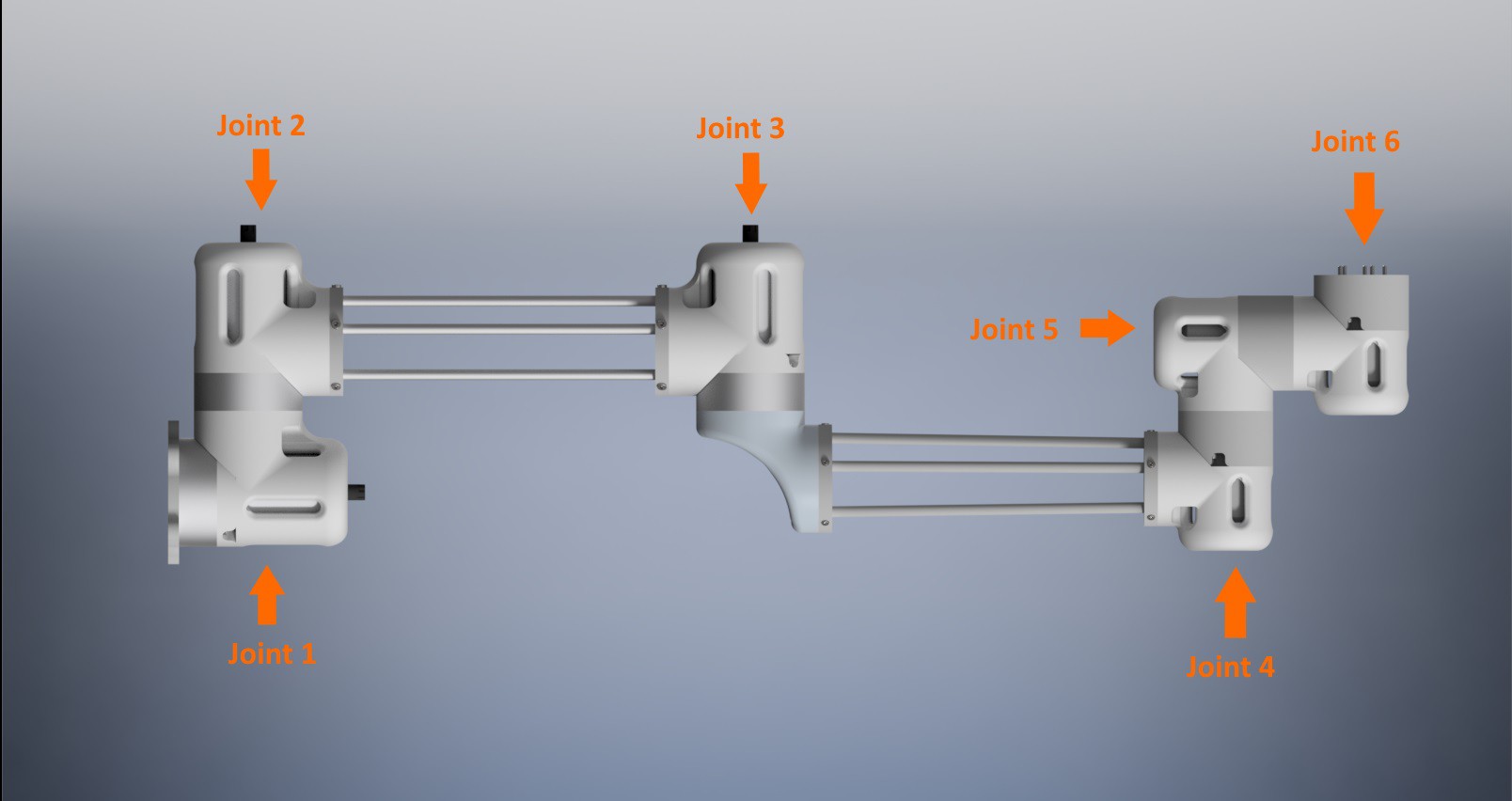
The 2 sizes of joints, the big one, 80mm of diameter and 100 Nm of torque. The smaller, 70mm of diameter and 35 Nm of torque.







 Navid sabet
Navid sabet

 Aleksey
Aleksey
 Baird Bankovic
Baird Bankovic
Can you share stl ? :)