 Mitja Breznik
Mitja BreznikController is being designed with three specific operating topologies in mind.
Current state:
We have a working software for the 1.) and 3.) topology. Next, custom HW design and software support for 2.) topology is planned.
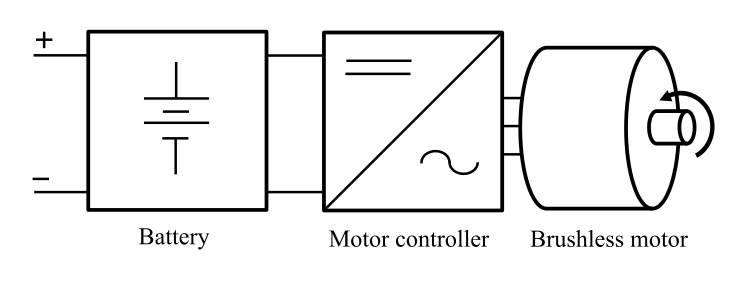
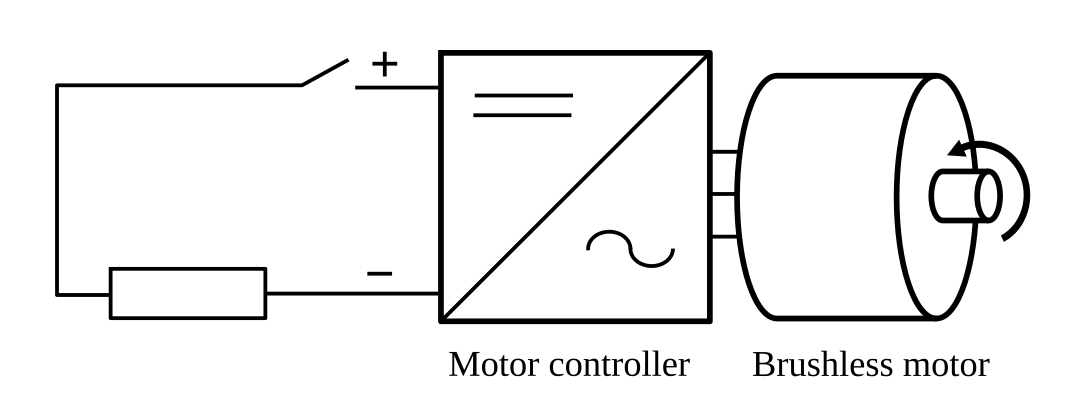
1.) Generator is connected to a battery
Motor controller shall run a MPPT algorithm, control charging, reduce power consumption when energy conversion is not possible.
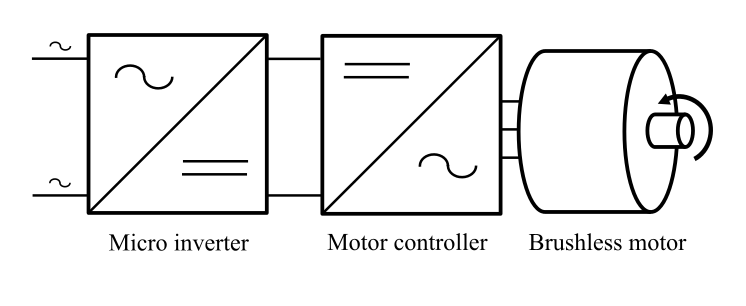
2.) Generator is connected to a grid tied micro inverter
Motor controller shall emulate a U/I load that is compatible with micro inverter MPPT algorithms.
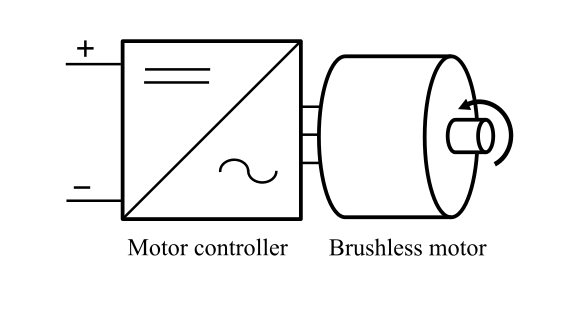
3.) Generator is supplying a low voltage grid
Motor controller shall regulate voltage on the DC voltage grid.
Embedded SW for motor controller:
Controller can operate in different modes according to the above requirements. For motor/parameter setup existing VESC capabilities and documentation can be used.
MODE 1: MPPT + battery charging
Simple and predictable MPPT scanning algorithm was developed. Parameters can be adjusted to fit different applications (scanning time, current/torque step, maximum current, MPP timeout, starting speed etc.).
Based on the battery voltage charging current is derated at full state of charge (with adjustable voltage gap and full battery voltage).
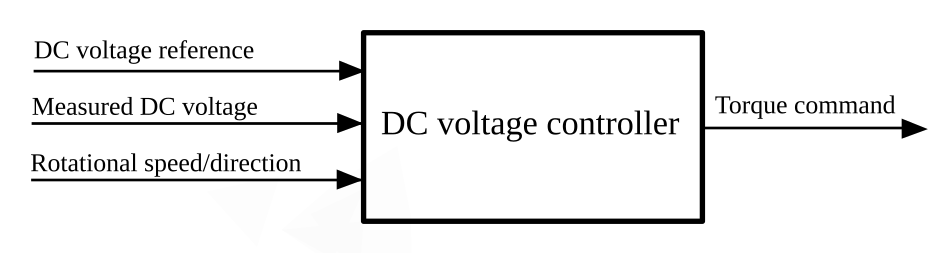
MODE 2: Voltage regulation to support U/I curves
Voltage on the output of the motor controller is regulated by constantly adjusting motor torque. Output voltage/current curve can be parametrized to support external MPPT tracking from the grid tied inverter.
U/I curve can also be parametrized to support a constant DC voltage source within the capabilities of the mechanical energy source.
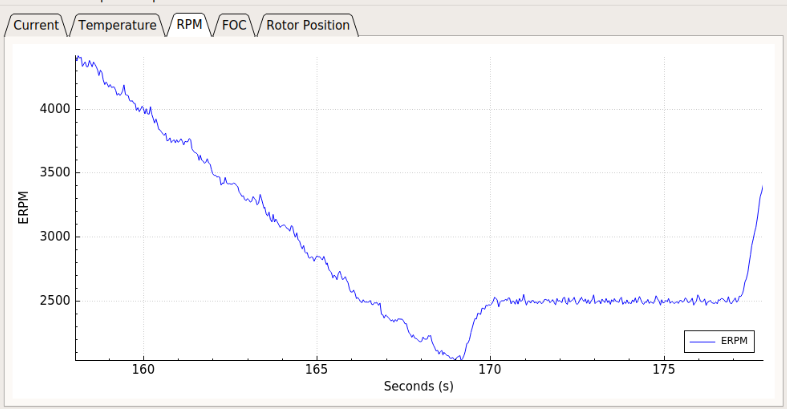
MODE 3: Simulation of rotational energy source
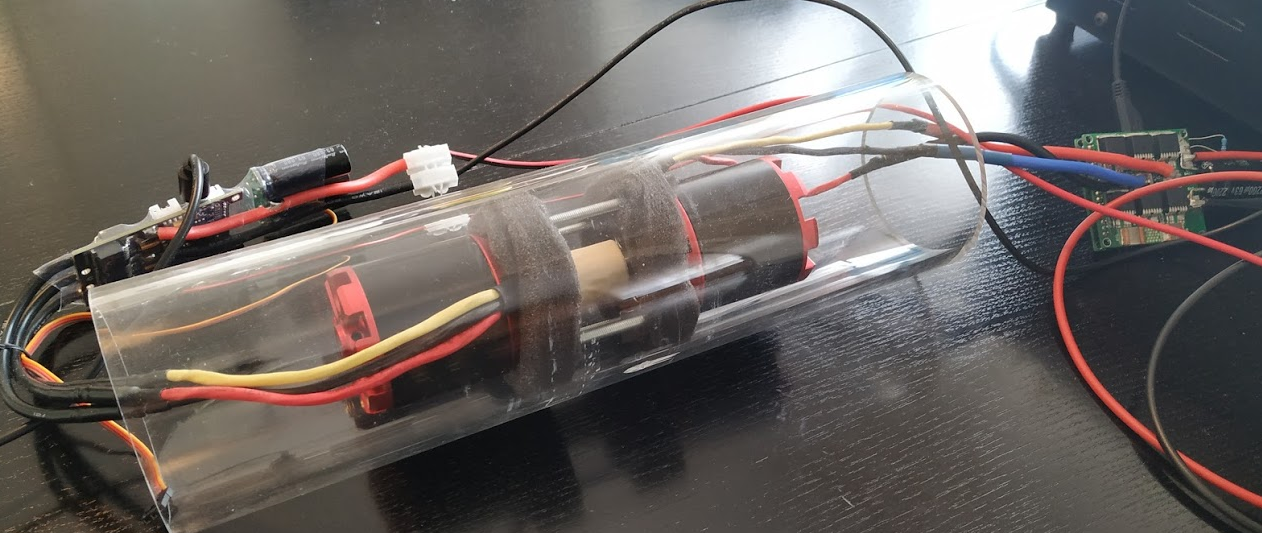
A simple mechanical energy source is modeled that reduces rotational speed with increasing torque (with adjustable coefficients). This mode can be used to test different generation algorithms on a back-to-back setup (two motors and controllers mechanically coupled with a coupling).
SW for PC GUI application:
Generator mode is integrated into the existing VESC GUI application. Different generation modes and parameters of the controller can be configured.
Hardware design:
A variation of low power (<50 V 1000 W) motor controller and mechanical enclosure will be proposed with improved thermal and environmental performance. A contactor on the DC link will be added to reduce current leakage when motor is not generating power. Software will still be fully compatible with existing VESC based motor controllers.
System sizing instructions:
Template for motor/controller sizing based on the system requirements will be prepared.
 Instead of connecting the generator side of the system to the wind or water turbine I programmed a simple linear speed/torque curve to one of the motors:
Instead of connecting the generator side of the system to the wind or water turbine I programmed a simple linear speed/torque curve to one of the motors: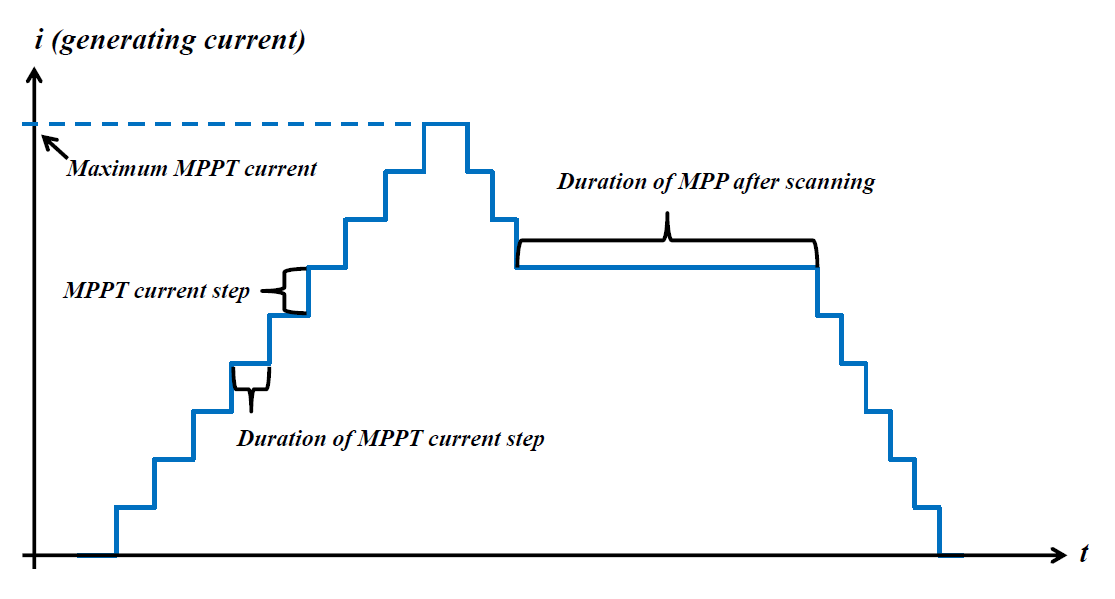 All parameters can be set of the PC GUI application with the modified VESC Tool:
All parameters can be set of the PC GUI application with the modified VESC Tool: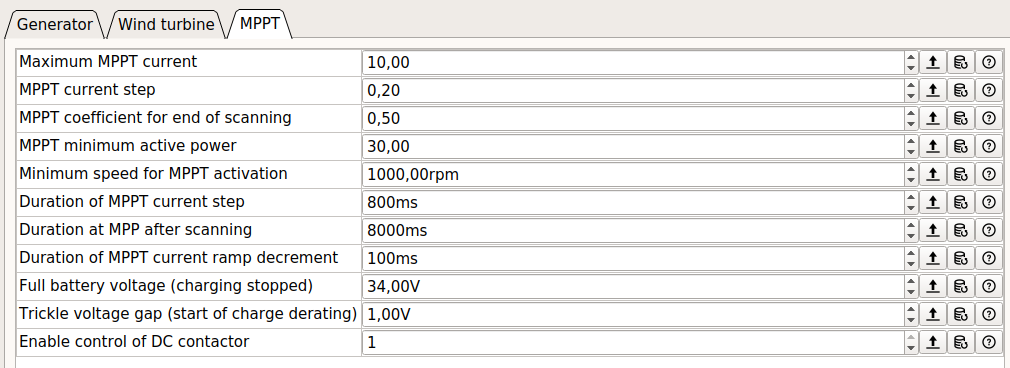 Number of different parameters should ensure that SW could be adapted to a number of different generator applications.
Number of different parameters should ensure that SW could be adapted to a number of different generator applications.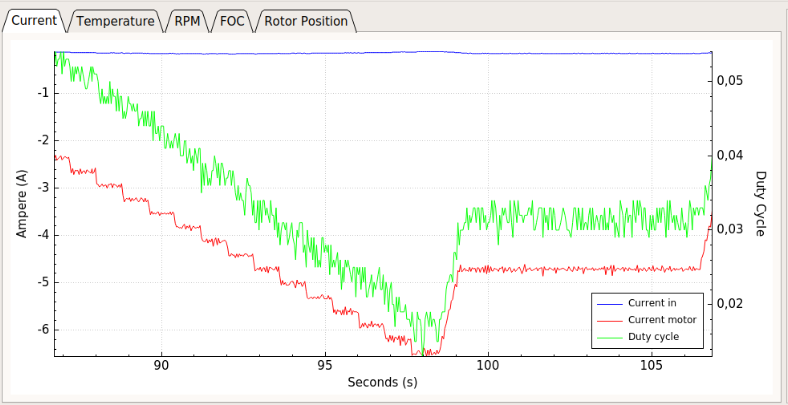

I'm planning to do something similar and would be interested to hear if there has been any more progress in your project?