0%
0%
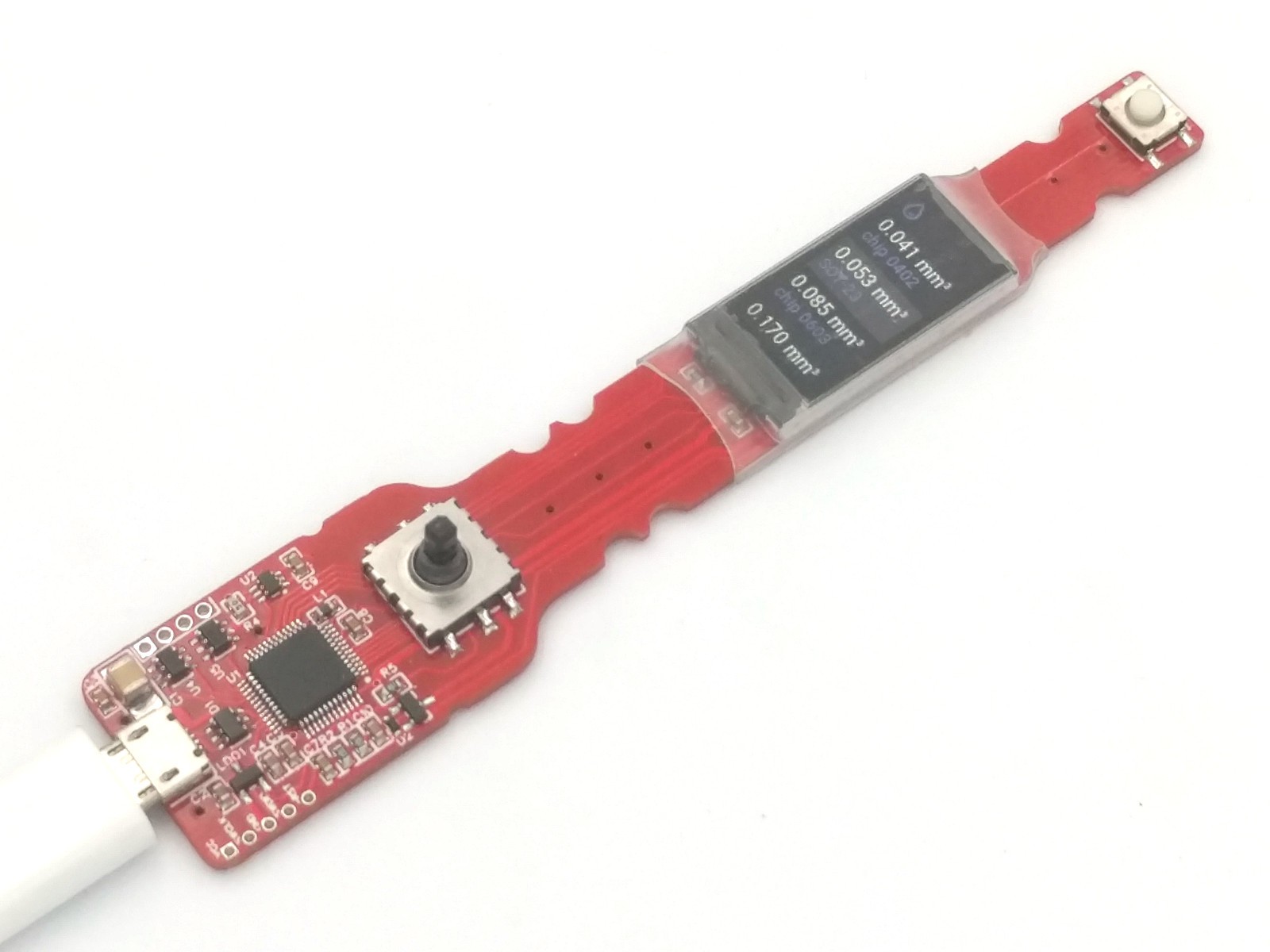
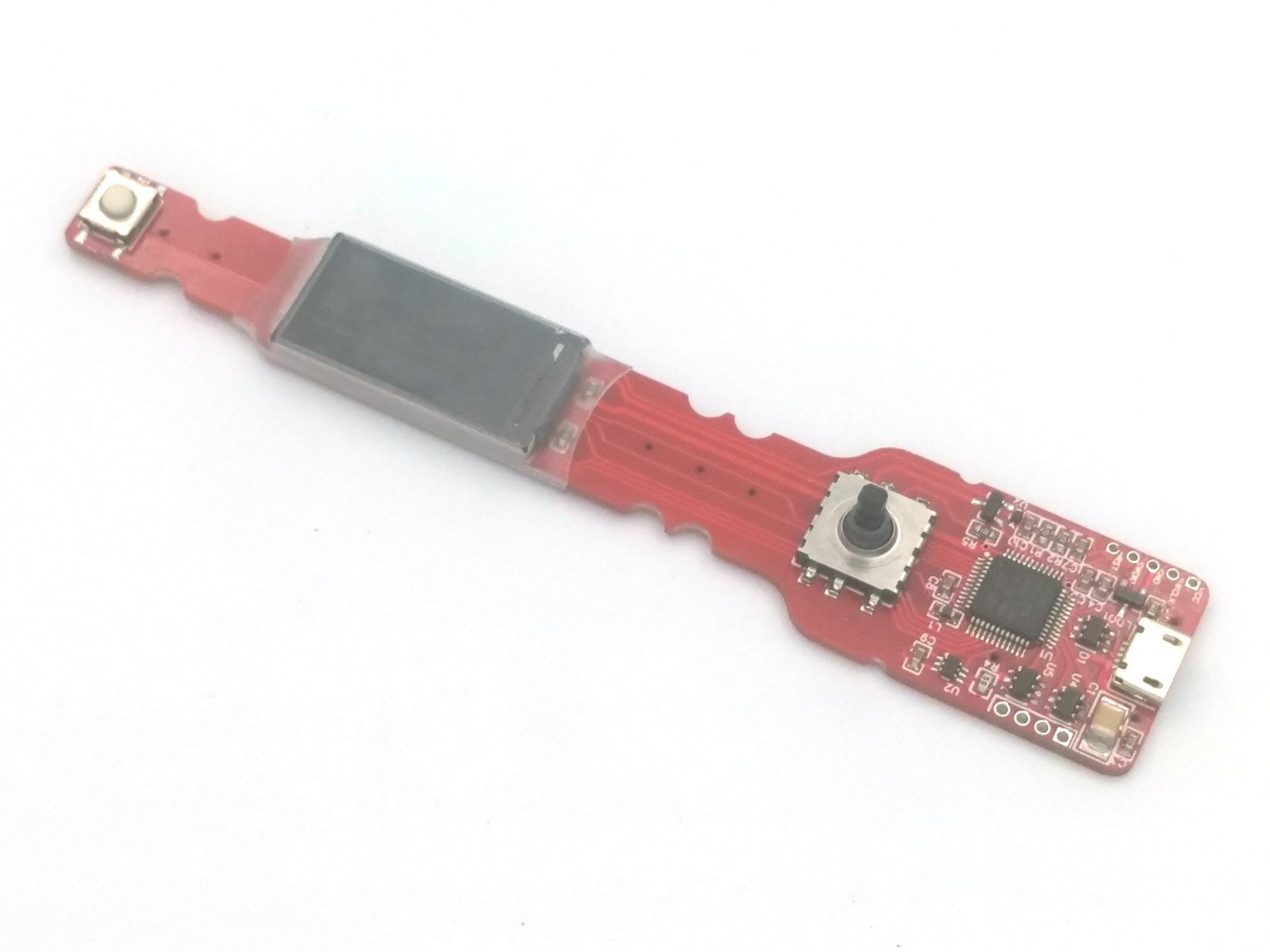
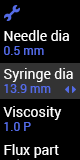
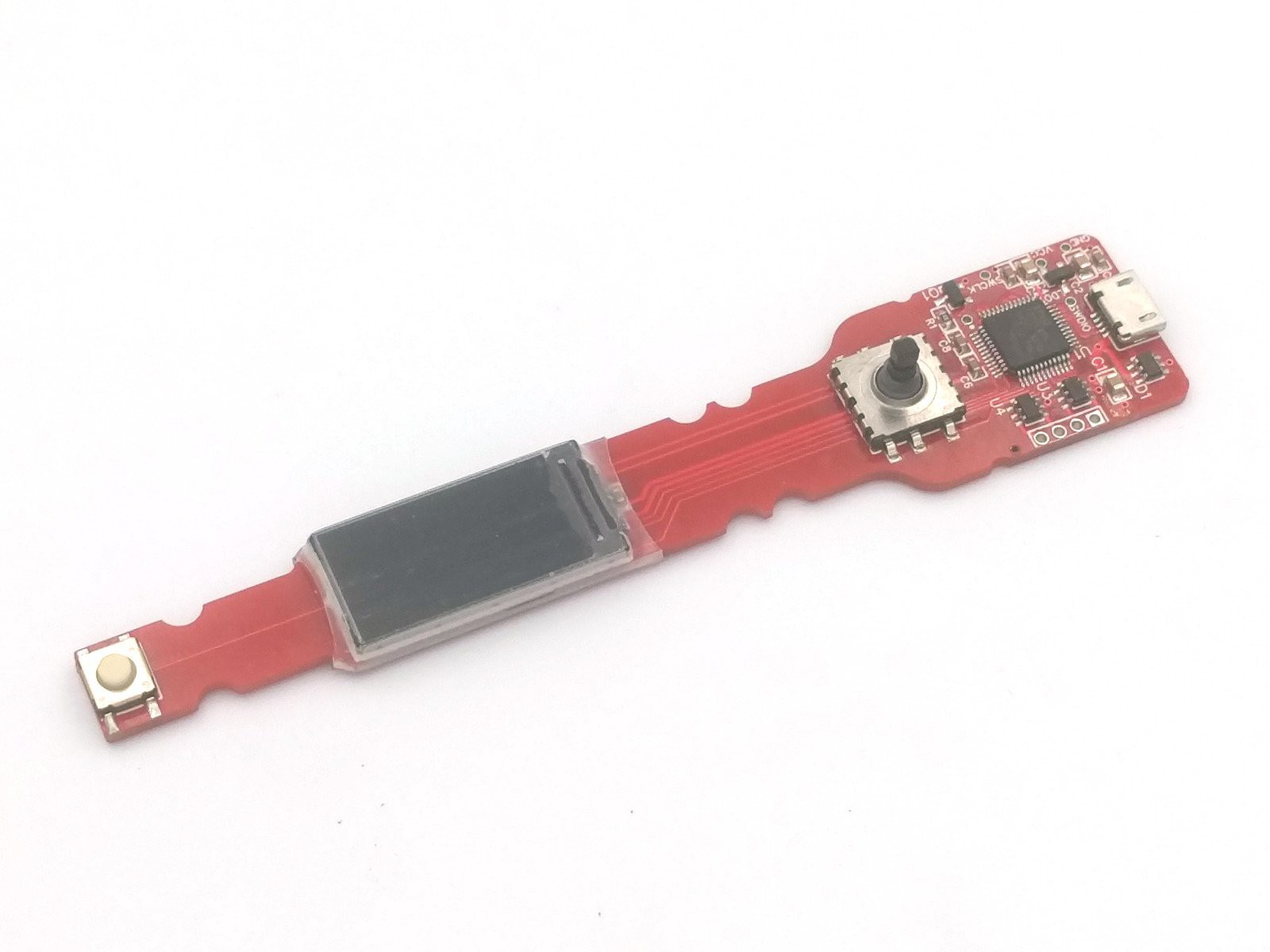
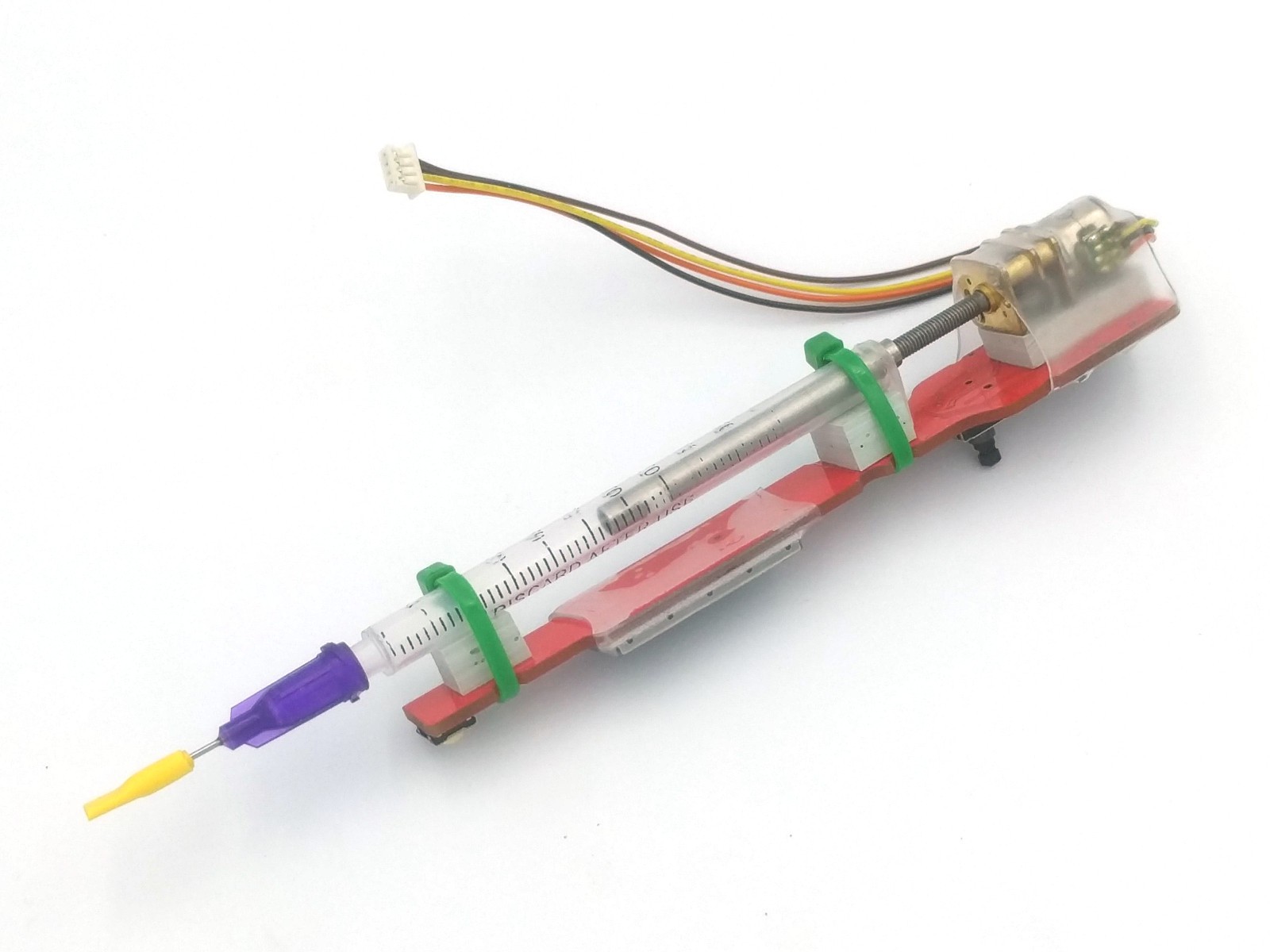
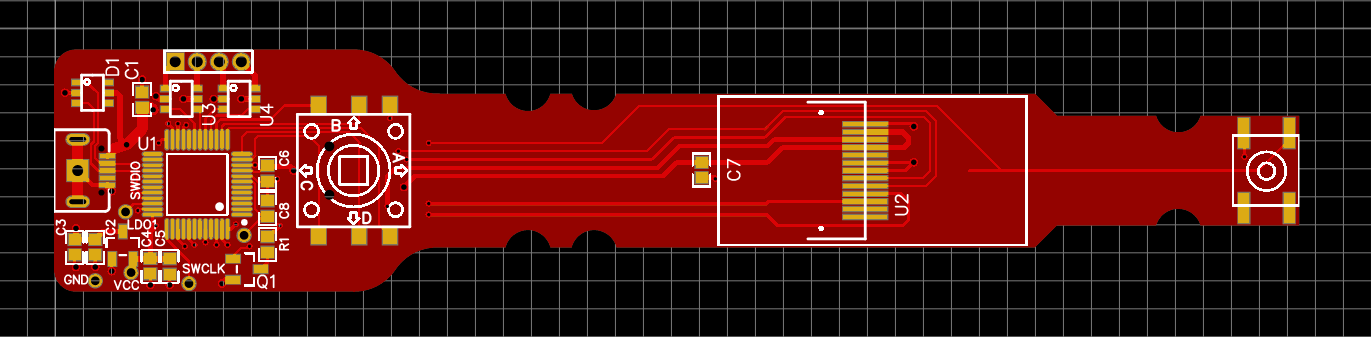
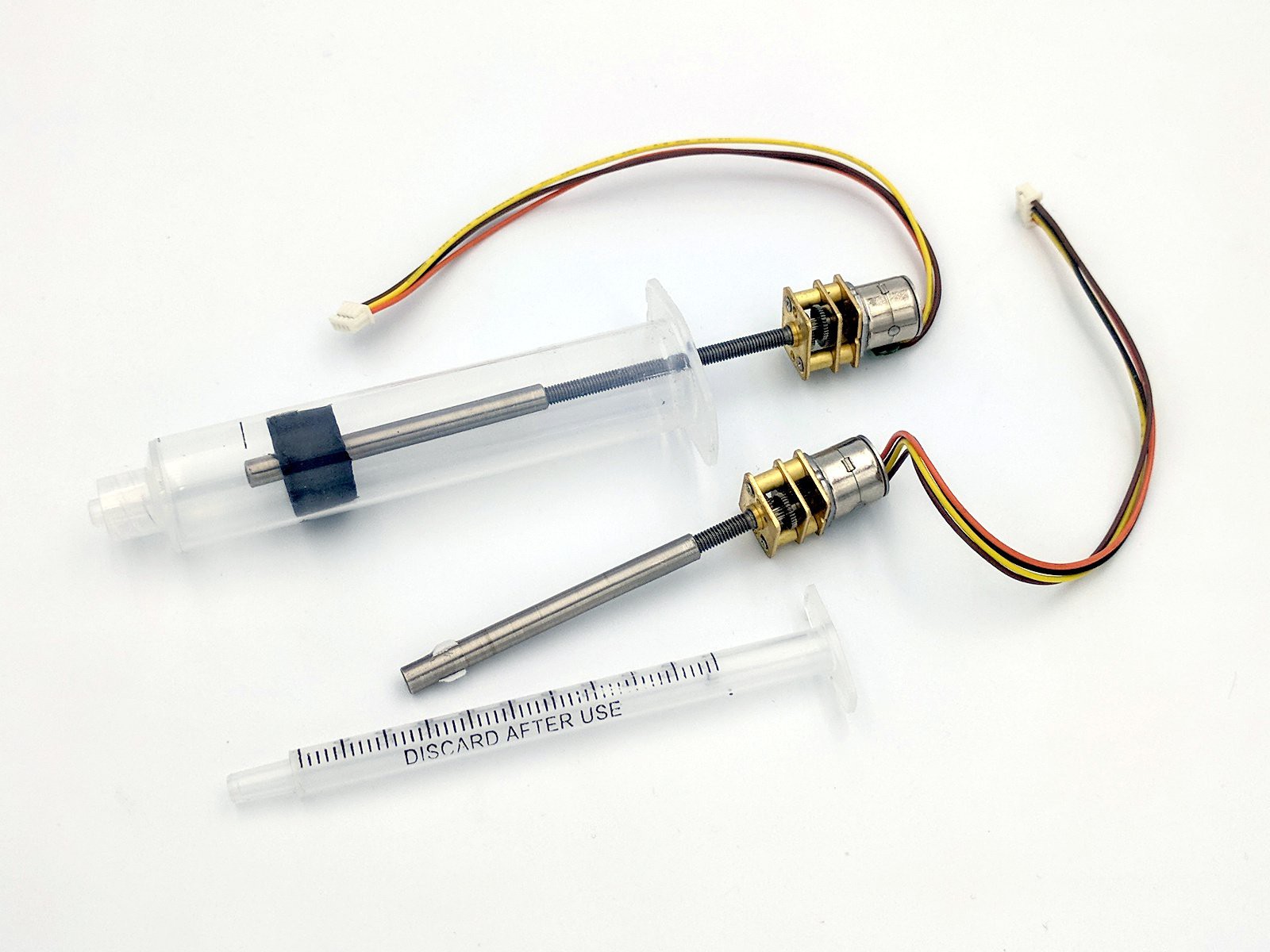
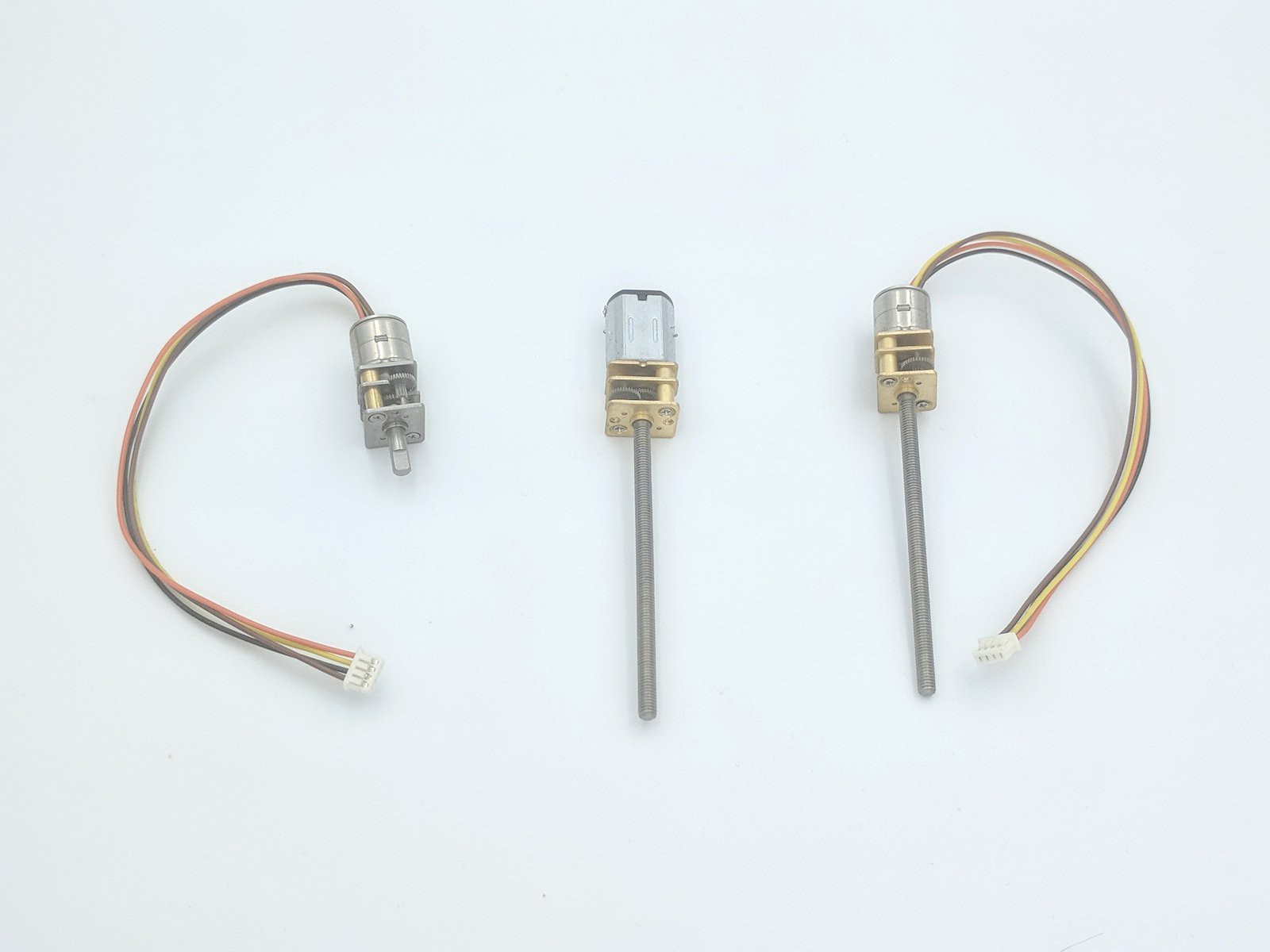
Solder paste and flux dispenser
DIY for hobby use
 Vitaly
VitalyBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests











 deʃhipu
deʃhipu
 TDG (Béla)
TDG (Béla)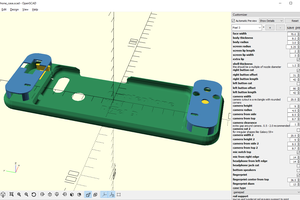
 Maave
Maave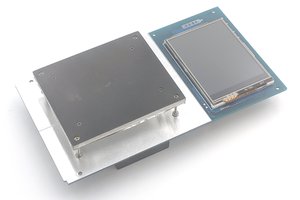
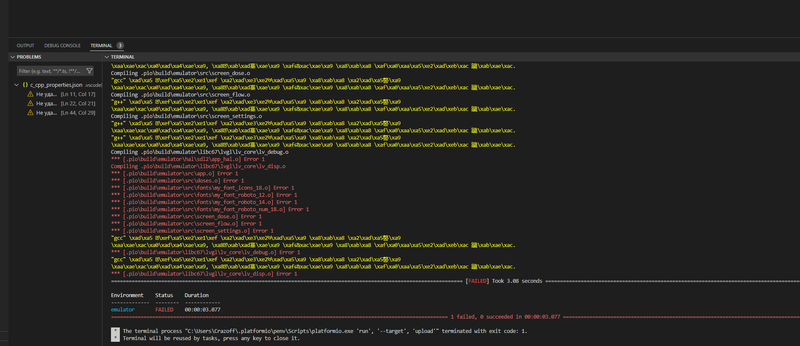
Hi, has anyone managed to program it, have already bought all the components except for the circuit board, is there one who has gotten the dispenser to work
Sincerely, Lukas