krzysztof krzeslak
krzysztof krzeslak-
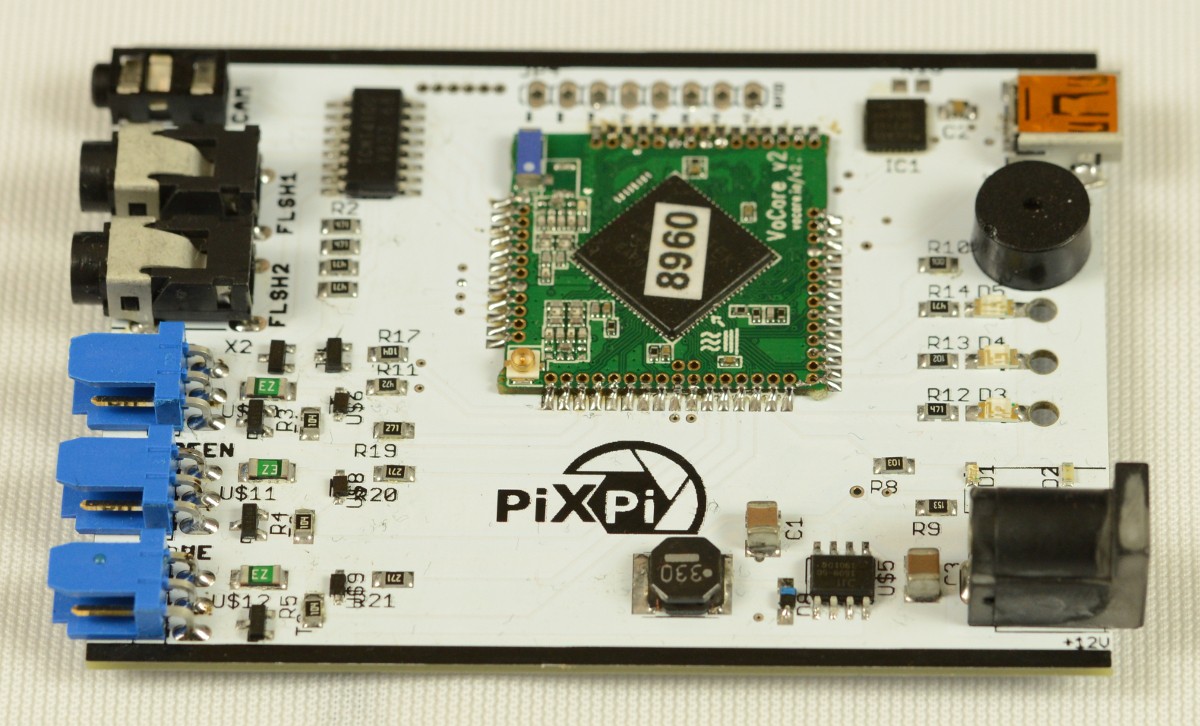
Modules under the hood
08/13/2019 at 18:50 • 0 comments![]()
![]()
Hello, today i wanted share some detailed overview of modules, how they built and more importantly how they communicate with main controller, it's significant as standarized communication interface is something which make possible to easily extend capabilities through adding new module, so I put some thoughts behind design of modules interface.
So on controller there are 3 modules ports:
- Port red
- Port green
- Port blue
Each port consist of 3 pins:
- COMMON: configurable 3,3V input or output (additionally as 1-wire in case of port red)
- 12V supply(currently always on, but in future I plan to add "power drive" feature)
- GND
![]()
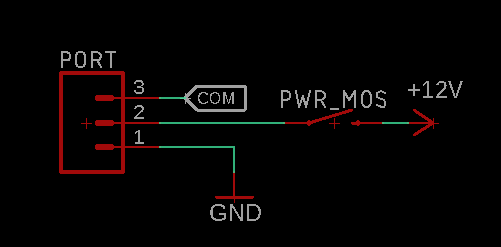
simplified port circuit ![]()
Actual port driving circuit, there are some port's protections added and mosfet is actually driving low side For driving Sensor modules following configuration of port will be used:
Com pin direction set to input, when sensor is not detecting anything it should give 3,3V after signal is detected it should pull COM pin to GND potential.
Supply for sensor is provided by two remaining ping - 12V and GND.
For driving Action modules
Com port set to output, when "action" is to be triggered, com port will go to High state out-putting 3.3V, but also reversed logic could be used here with no problems as default state can be configured as "HIGH" state.
For driving Motorised modules:
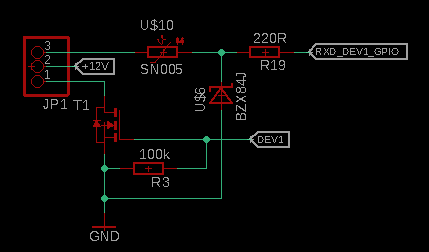
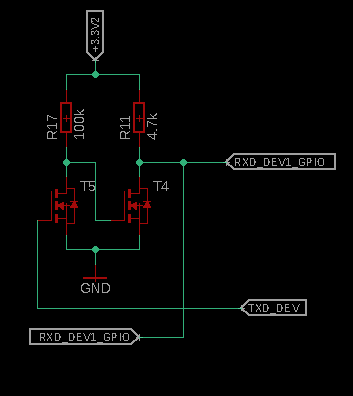
Currently I've implemented 1-wire communication(Over uart, so port red have additionally uart to 1-wire interface circuit) for bi-directional communication over single pin with motorised modules, thought behind it was that 1-wire interface can serve multiple slaves, so using one port there will be be possible to communicate with multiple nodes, this could be useful for example for some multi axis sliders, but now I come to conclusions that maybe i over-killed it a bit and think about changing this approach to "servo-like" interface, so first I want to try driving motorised module using soft-pwm this will not have possibility of driving mutliple nodes with one port, but then not only port red will be capable to drive motorised module, but each of port, so still it should be fine, anyway I will keep uart/1-wire interface circuit on port red, as this can be useful in future, and interface circuit in quite simple.
![]()
uart to 1wire circuit specific for port red,
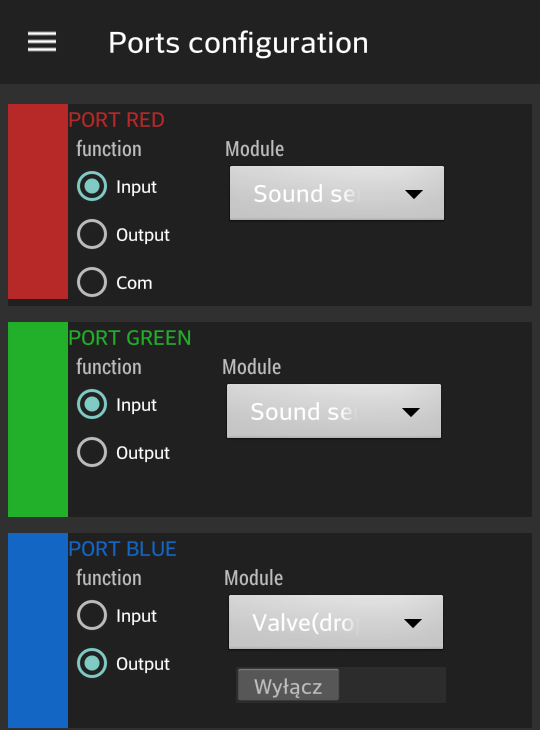
based on https://www.maximintegrated.com/en/app-notes/index.mvp/id/214Ports function are configurable from app, function refer to COMMON pin function:
(just note that "Com" is communication function of port, it's different thing from "Common" port)
![]()
In case of output's(port blue on this screen), default state can be configured, module selection is not used at all now, but thought behind adding it was to name port driving blocks with corresponding name's , for example not just "wait for port red", but "wait for noise" in case of selecting sound sensor on port red. ![]()
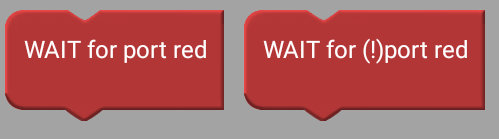
After setting port(red in this case) to input mode, such blocks will be available in program editor ![]()
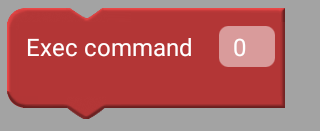
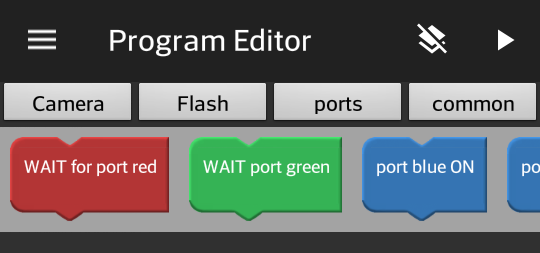
Available blocks in output mode ![]()
Port red in "com" mode Reasoning behind naming port's with color's was that it's easy to distinguish quickly in program editor which port is being used.
![]()
So what's under the hood of currently implemented module
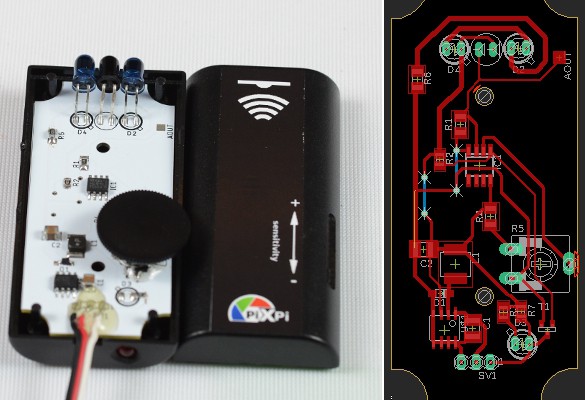
reflection sensor
Sources: https://github.com/krzysztofkrzeslak/pixpi-reflection-sensor
![]()
Reflection sensor consist of two iR-diodes and photo-transistor which is connected to voltage comparator, which compares voltage level set with potentiometer, it's supplied with AP1509 step-down converter. currently in best case operating range of this sensor is at maximum 35-40cm, but it differs greatly depending on color and surface of detected object, so in worst case for black material it can be reduced to 15cm, which is something which I want to improve in future.
Sound sensor
Sources: https://github.com/krzysztofkrzeslak/pixpi-sound-sensor![]()
Sound sensor is based on ne555 chip, circuit is based on, just slightly modified to fit my needs:
https://www.doc-diy.net/photo/sound_trigger/Light sensor
Sources: https://github.com/krzysztofkrzeslak/pixpi-reflection-sensor
![]()
Light sensor is...basically reused reflection sensor circuit without ir diodes as big photoresistor insted of phototransistor :)
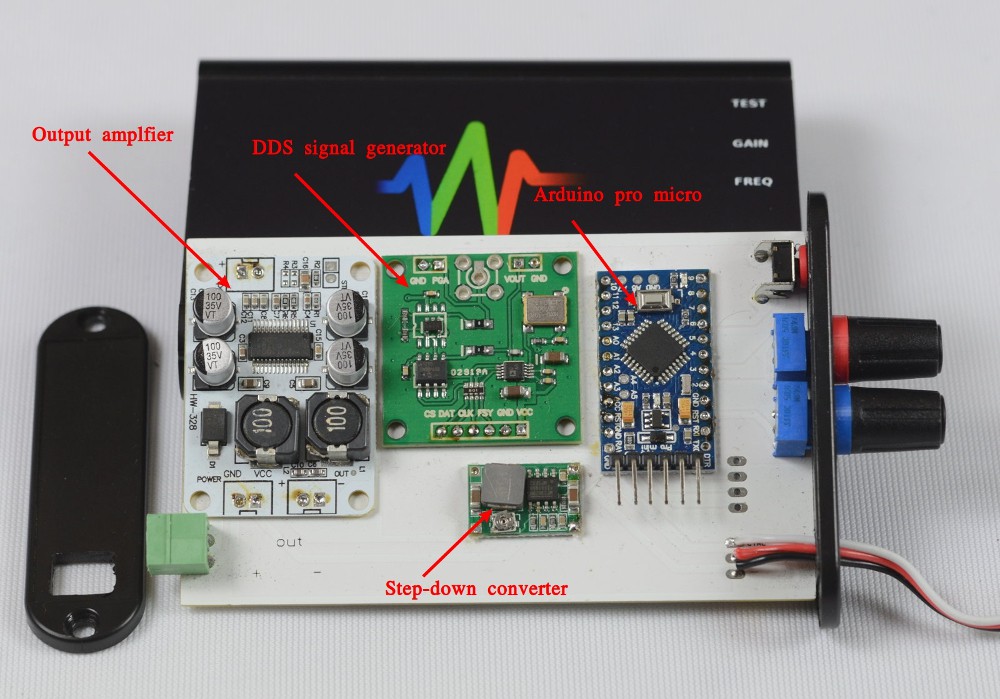
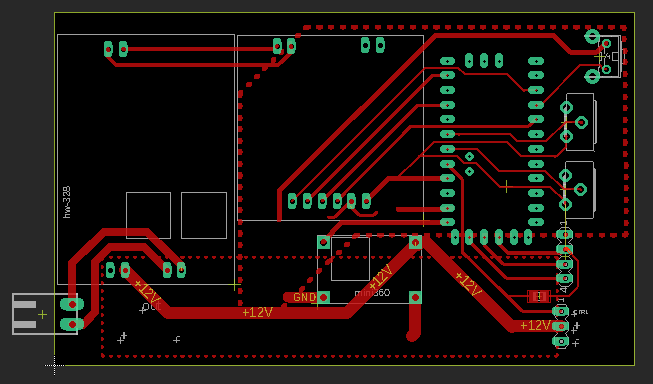
Speaker driver module
Sources: https://github.com/krzysztofkrzeslak/pixpi-speaker-driver![]()
![]()
For speaker driver I used Arduino, dds generator and power amp modules and i found it as a good decision as this reduced complexity and costs of circuit. All is enclosed in black anodised aluminium case from Hammond, bought from local electronics supplier, washers for potentiometers and button was 3-d printed. Operating principal is that when it receives "HIGH" signal on com pin, it's starting to generating signal with frequency and gain, set with potentiometers. btw. those un-routed traces are connected with polygon after applying it, yea this board also need some tweaks, as I need also change potentiometers on it as this which i used now are quite expensive.
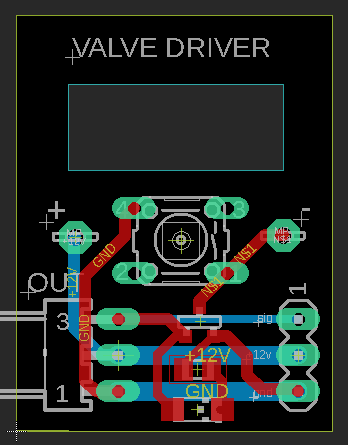
Pneumatic gun module![]()
Heart of pneumatic gun module is solenoid valve, solenoid of this valve is driven through small board with mos-fet(more on this in droplet module description), also very significant part of this module is pressure regulator, which o get from Aliexpress, "proper" use for it is pressurising keg with beer but I must stick with bottled beer now ;), as it works pretty well as supply for pneumatic gun :p, it supply about 10 Bar's , which is just right for crashing bulbs and glass, but not too much to create some serious injuries to photographer, anyway still safety glasses are necessary ;) regulator: Aliexpress link, Here this regulators can be bought
valve: Aliexpress link , those are marketed as fish tank valve ;)
For bullets i use something which is called clamping screw, which i get at local hardware store, they are cheap, working very well and even looks like bullets: google search link
barrel is just piece of stainless 10mm pipe, glued with to threaded reduction piece.
Droplet module:
Solenoid driver source: https://github.com/krzysztofkrzeslak/pixpi-solenoid-driver
![]()
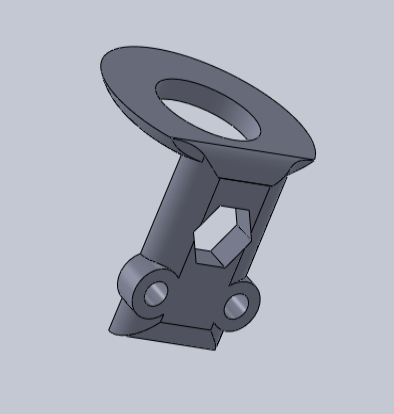
For droplet module as liquid reservoir syringe cylinder was used I just put sticker to it to make it look nice, valve unit is same as for pneumatic gun, so solenoid driven with mosfet board, also on mosfet board button can be seen, it's for manual valve opening, in case of this module it's very handy for example for filling valve with liquid, tripod mount is 3d printed. ![]()
Valve "holder" design ![]()
Valve driver board, here also some tweaks will be needed I need to add mos-fet gate protection and maybe not to drive coil directly through tact switch, but with using of on-board mos-fet.
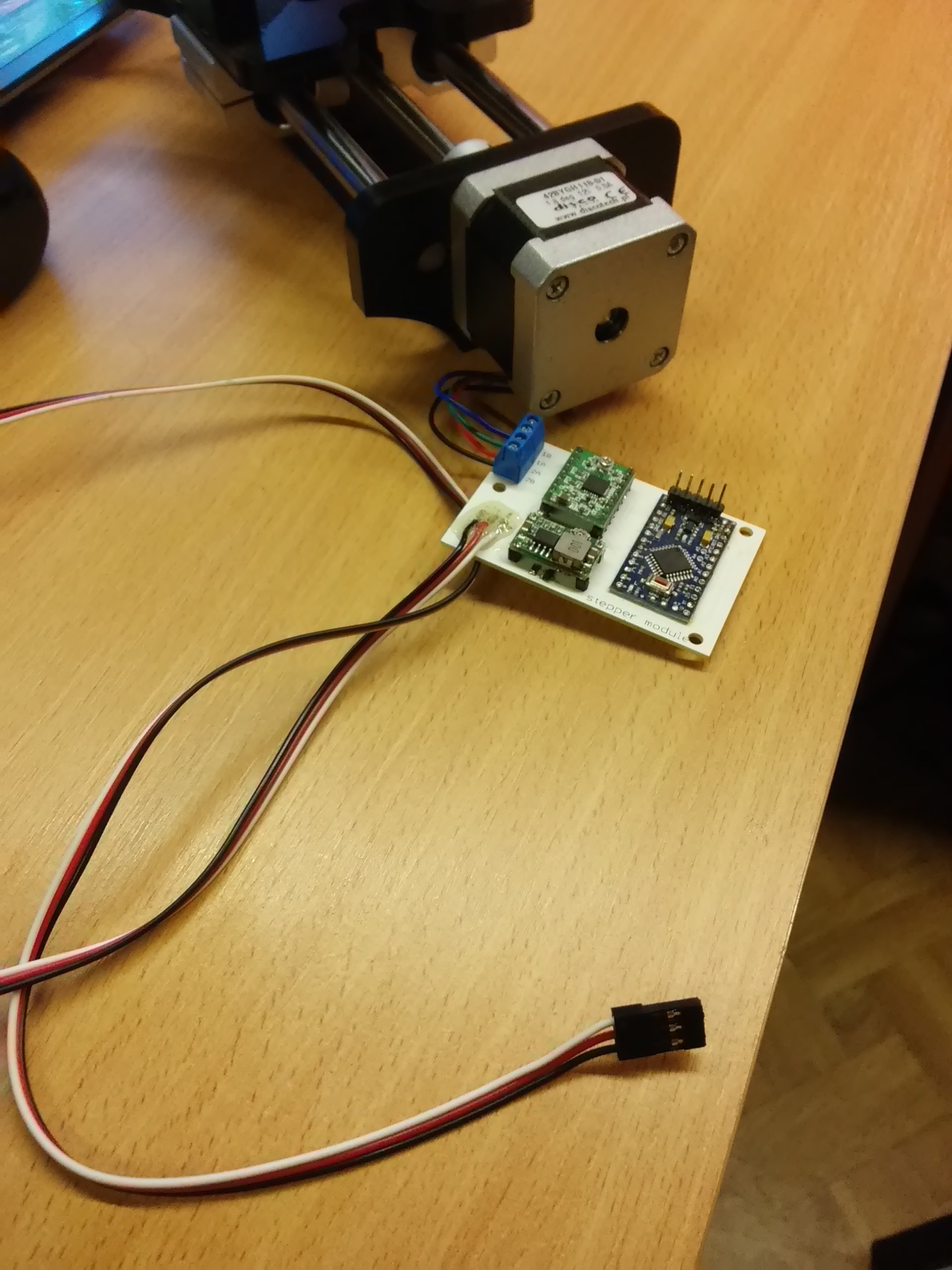
Motorised modules (ExtremeMacroRIg)![]()
Currently one motorised module which is built is macro rig, currently i'm working on driving circuit
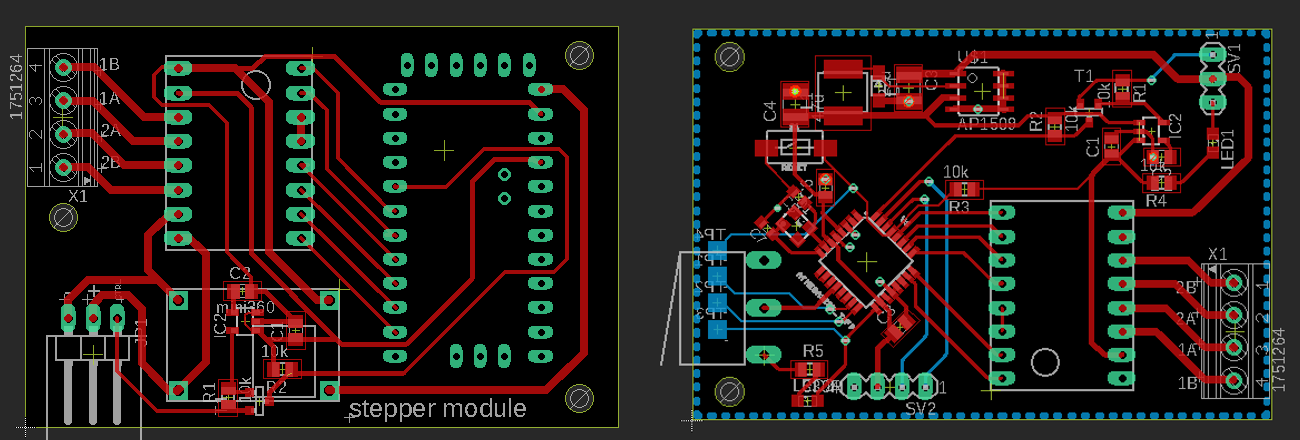
Sources: https://github.com/krzysztofkrzeslak/pixpi-stepper-driver![]()
Currently I've got 2 prototypes for driving boards,but unfortunately I've got some problems making newer board working, so for software development I will fallback to older board, as generally they should be software compatible as i'm planning to put arduino bootloader to second board
...so for today I will end on this, just follow for updates ;) -
Light sensor as laser barrier, part 2: usage
08/11/2019 at 07:37 • 0 commentsHello
Today I wanted to share with effect of usage light sensor with laser which I shared in previous log.
![]()
Final effect ![]()
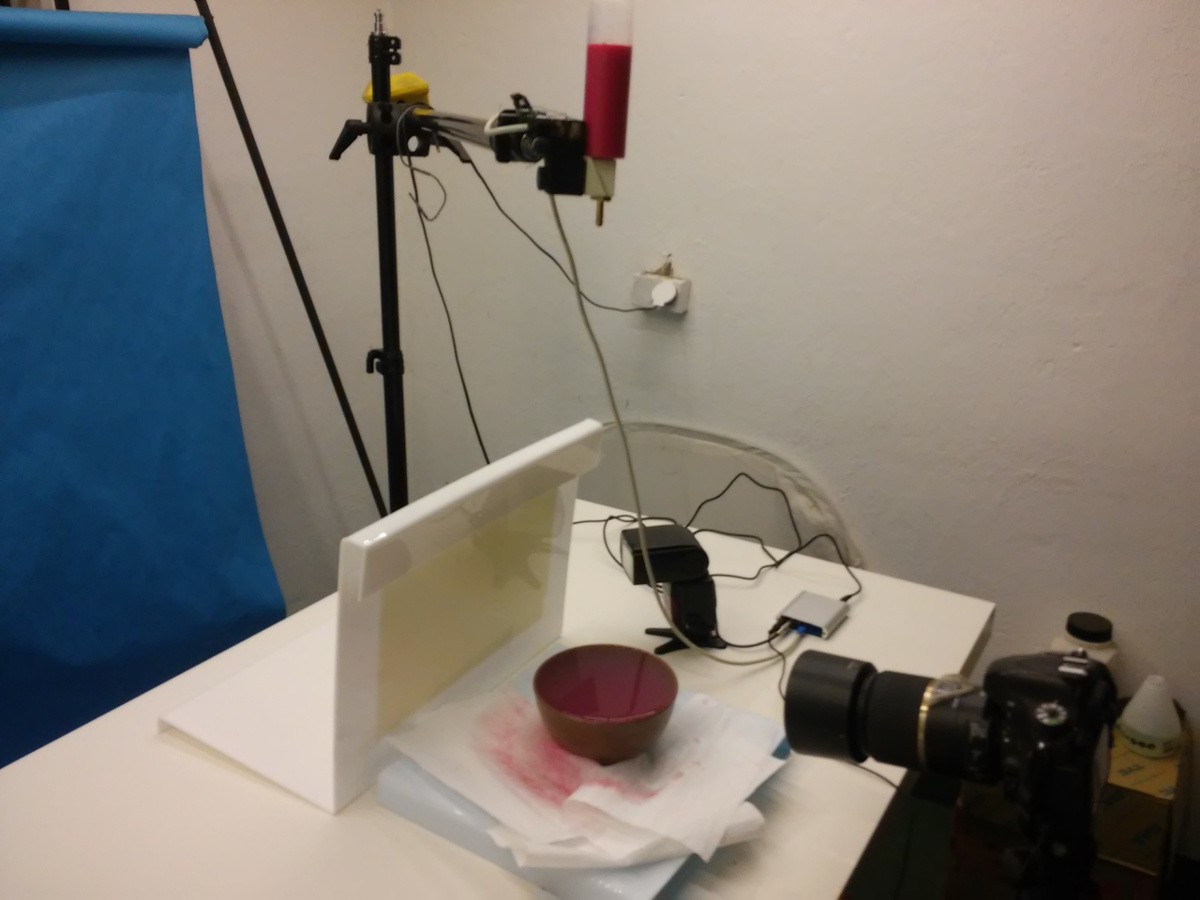
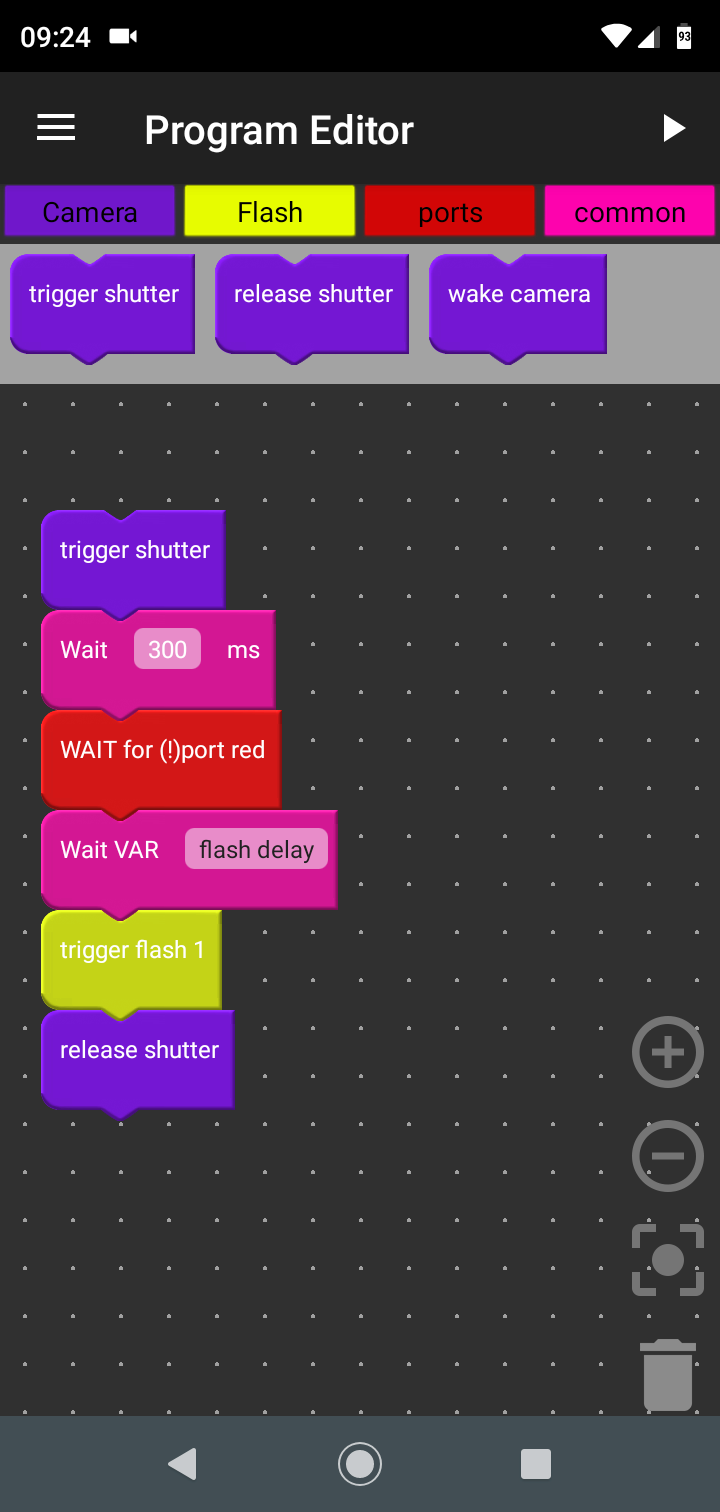
Program/script which was used for taking this photo.This time I used high speed photography method, so photo was done in dark room, using high speed flash illumination, camera shutter was set to bulb mode. Program explanation: "trigger shutter" opens camera shutter(it's like pressing and holding shutter button on camera), then it waits for 300ms to make sure that shutter is open and still, then "wait for (!) port red" waits for negated signal on port red(so laser beam interrupt by falling strawberry in this case), after signal is detected there's delay which can be adjusted from control panel, after set amount of time flash(connected to port 1) is triggered , so actual photo is taken and shutter is released ending sequence ![]()
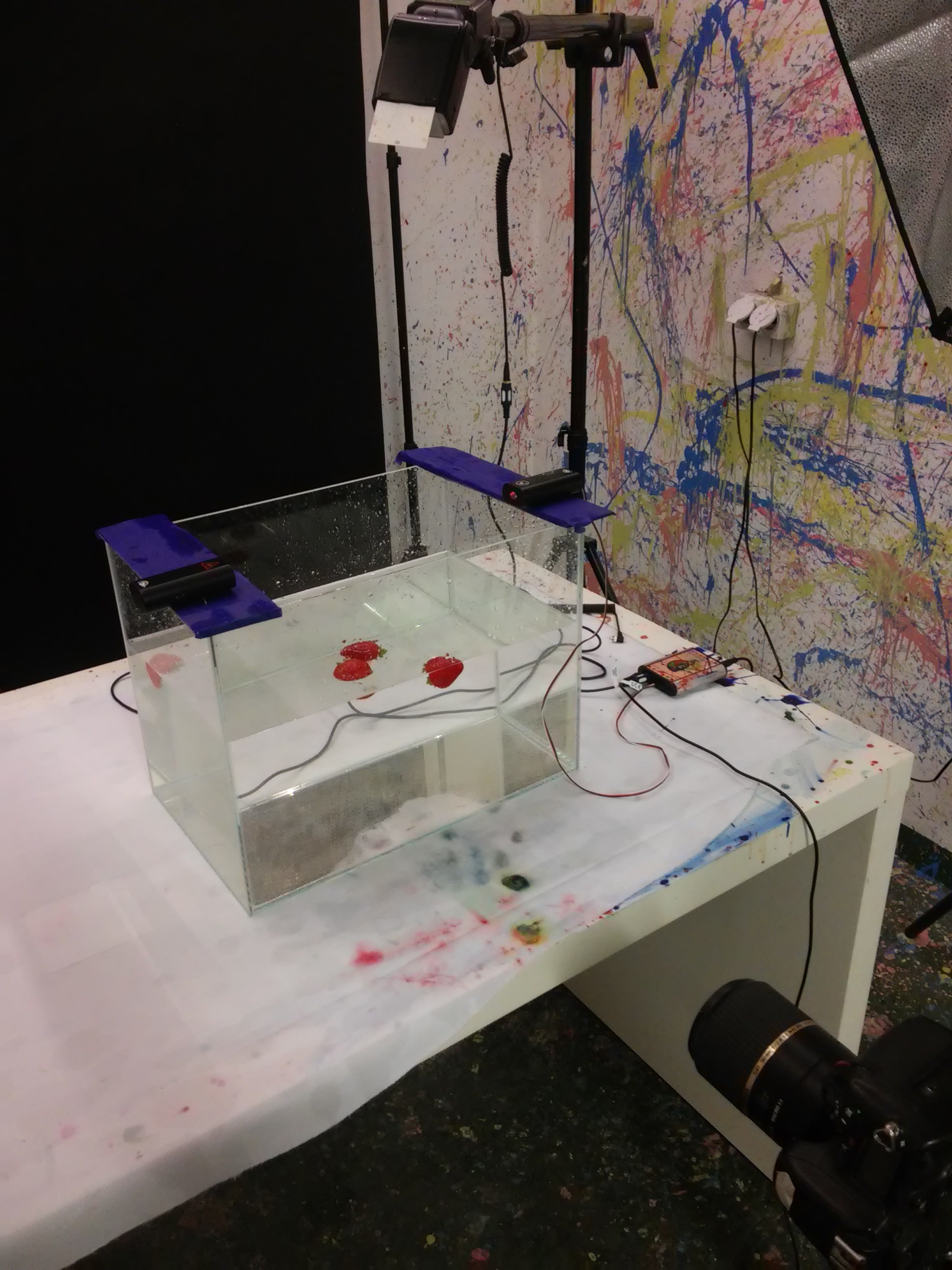
setup which was used, few attempts was needed ;) -
Light sensor as laser barrier: part 1
08/09/2019 at 18:12 • 0 commentsHello
Some time ago I had an idea that light sensor can be also used as light/laser barrier, as I had some laser module laying around, which i bought some time ago on Ebay so I decided to give a try l, it's still to be tested in action, but it's a good opportunity to share some photos from workshop ;)
![]()
final effect ![]()
"clamp" 3d printing ![]()
for tripod mounts i use 3d printed "clamp" with pressed 1/8inch poliamide nut ![]()
complete setup with light sensor ![]()
inside is just battery holder, (glued)switch and laser module, so it's really simple contruction ![]()
machining step, case which i'm using for this and also for all sensors is "PP23" bought from distributor which i got near my living place (tme.eu) ![]()
stickers designed in gimp, to make it look nice ;) In future days I will try to make a some tests for it, generally use case is almost same as for reflection sensor, but sometimes I think it can be handier to use such laser barrier and I wanted to make use of those modules which i got lying around ;)
-
Extreme macro rig as first motorised module attempt
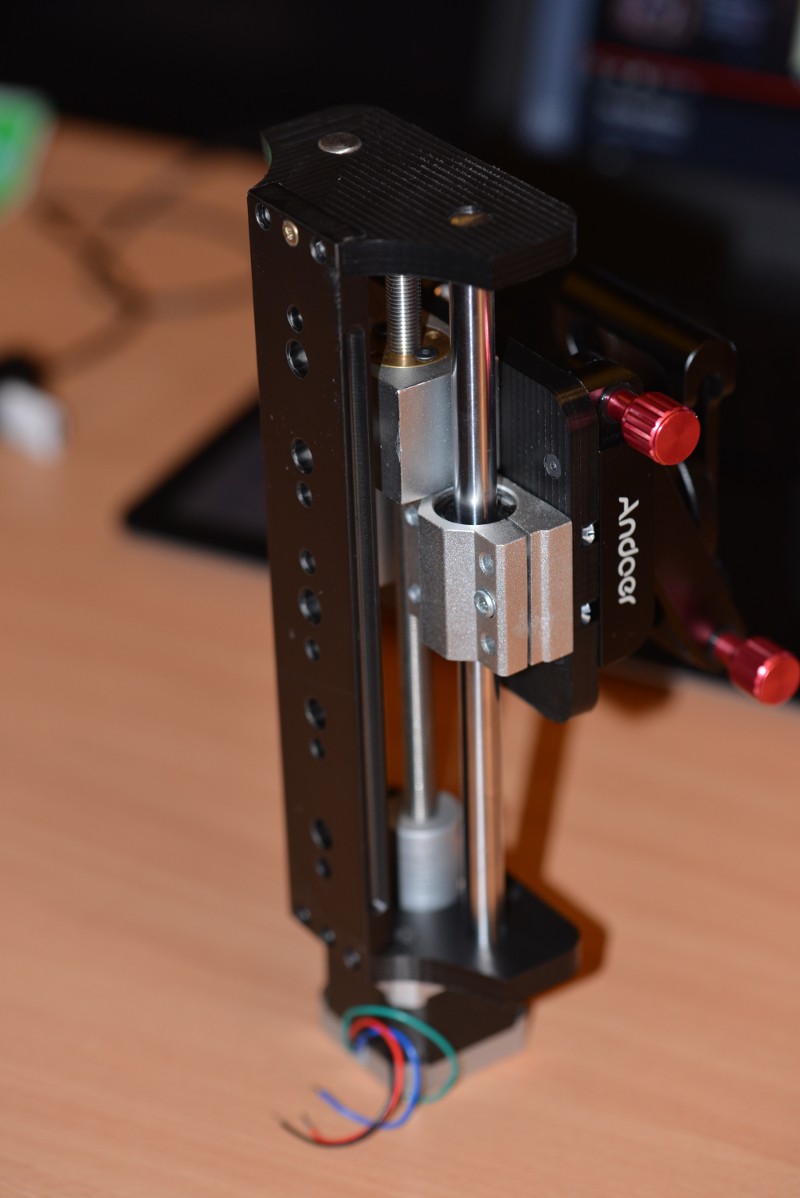
08/07/2019 at 18:15 • 0 commentsHello this time I wanted to share some example of motorised module example which I assembled some time ago
![]()
![]()
It's suppose to be something which is sometime called "extreme macro rig" and it's used for extreme macro photography.
Currently i'm working on driver electronics for it i made simple prototype already, but i got some problems with communications with pixpi controller.
![]()
Initially I my plans was to drive it through 1-wire interface which i implemented on pixpi(as master) as well on stepper driver board(slave), but there are some problems with it as arduino(slave) liked to stuck a lot during operation, i'm get feeling like i'm compicated it too much, so now i'm trying other approach, with using "servo like" interface, so using timed pulses for driving motor. I already implemented it on pixpi side, but still need to implement this on driver/arduino side.
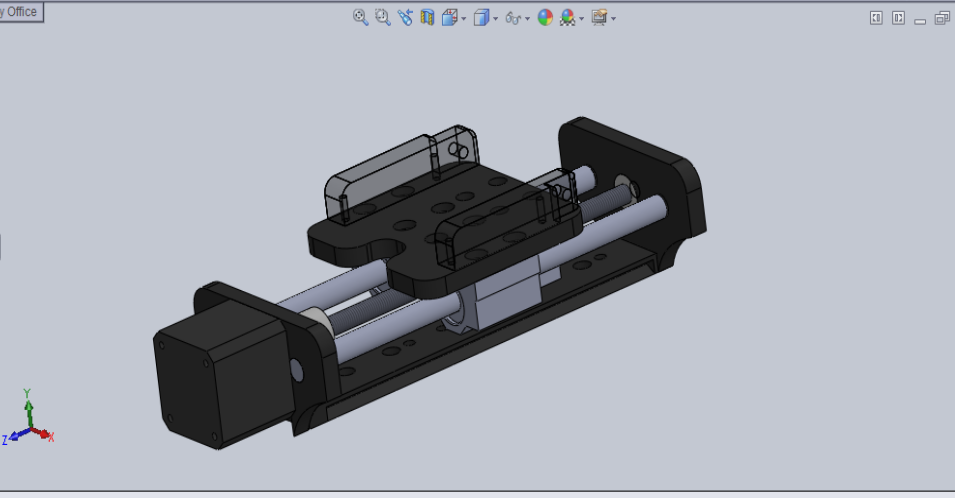
I spent some time on designing it, but i'm happy that I found complete dslr mount on aliexpress, so it made it's looot easier:
https://www.amazon.co.uk/Andoer-Z-shaped-Aluminum-Foldable-Camcorder/dp/B06XC5QSZD
![]()
![]()
Material which i choose is POM(poliacetal) as it's easy in machining and looks nice ![]()
later i decided to go with aluminium for this lowe(long one)element -
controller goals, design and prototyping
08/04/2019 at 08:12 • 0 comments![]()
Hello in this log I wanted to talk a bit about initial goals which I had for controller, design process, prototyping and also I will try to explain what was rationals behind each taken design decision.
As i mentioned in project description I started working on this controller after gaining some experience with high speed photography using Arduino and beginnings was hard, but anyway i enjoyed playing with this project so this was first and very important step - to get fun from what you do :).
![]()
White walls days :p 2 years, 6 months and 16 days ago ![]()
Photo from that day/s, not perfect, but it was fun ;) After first experiments i already had some thoughts what could be improved to make this works easier and better.
My initial thought was that it will be good to had possibility to easily tweak delays in program, electrical connections wasn't reliable at all, as well using optical sensor for detecting droplets also wasn't guarantee of good timing and repeatable results, so I had something to work on.
Then I came with idea of using RaspberryPi on which I could run some web interface which will be accessed with smartphone browser. From web interface [python]script was run, this script through RPi gpio`s and Mosfet shield will drive solenoid valve to make some droplets. At this time I already knew that utilising solenoid valve is right way, as I dig a little in internet and it seemed common solution for such use case, but I didn't saw anyone using RPi nor Python for it which can be understood, as it can be described as "taking sledgehammer to crack a nut", but I wanted to use it it as i could put some web-interface on it quite easily ...and i had a RaspberryPi lying on shelve which i wanted to use for something :p
![]()
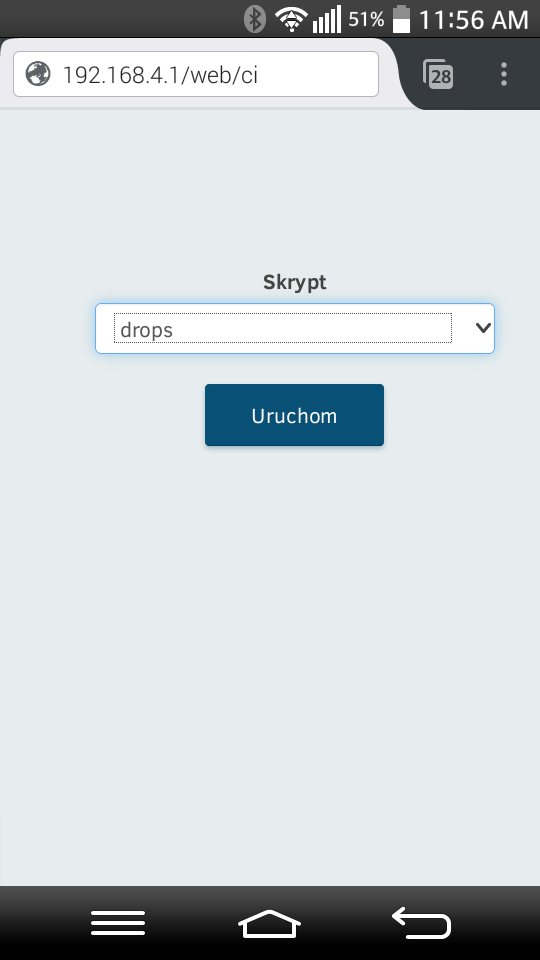
2 February 2017, some initial test ![]() Web interface which i used back then, time for quick lesson of polish :D Skrypt=Script, Uruchom=run, also it was lacking any configuration, just run selected script, so in effect I ended up hooking laptop with ethernet cable and direct script editing.
Web interface which i used back then, time for quick lesson of polish :D Skrypt=Script, Uruchom=run, also it was lacking any configuration, just run selected script, so in effect I ended up hooking laptop with ethernet cable and direct script editing.![]()
But at least results was quite decent with this setup
After this experiments I started thinking about creating some dedicated controller which I would like to use... and after some time I really started working on it ;)
I set some initial goals for controller:
1. Can be quickly and easily set-up
2.Can be reconfigured using smartphone, without need of use computer.
3.Can be used without knowledge in programming nor electronics.
4.At the same time will not limit those with some technical knowledge, so let's say to be hacker friendly and possible to extend in much as possible ways.
Withing above goals I came to some design decisions:
1. Single controller board which will have possibility to connect modules, provide supply for them and (of course) basic control signals.
2. Controller board need to be equipped with Bluetooth or Wi-Fi connectivity, so it can be controlled from smartphone Application.
3. Smartphone application need to utilise some graphical configuration/programming interface to make it easy to use, so I dig a little and when typed "graphical programming library" in Google search I discovered Blockly library(by the way, also created by Google) , also this affected final choice of programming language which I will need to run on controller board, as it will be hard to compile code on smartphone I needed language which will have possibility to execute code without compiling(from string) I already had experience with python and knew that python have "exec" function, so on smartphone I will need only to create Python script as a text.
Because of this decision i needed to look for (micro)controller which will be able to host Python.
4. Project will be opensource.
Withing this conclusions in mind, finally i started working on prototypes:
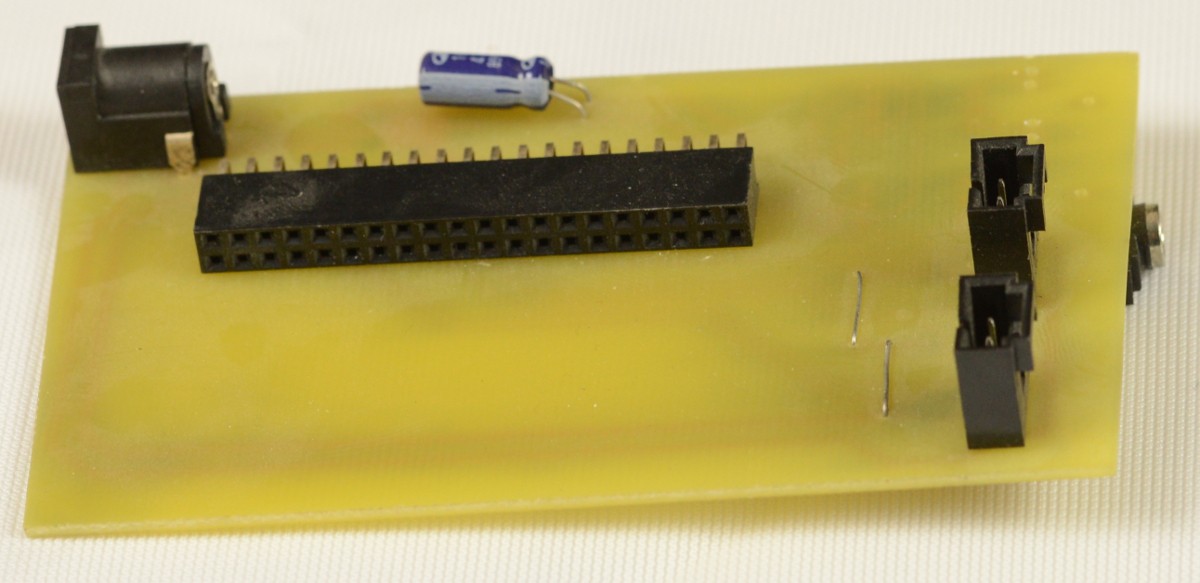
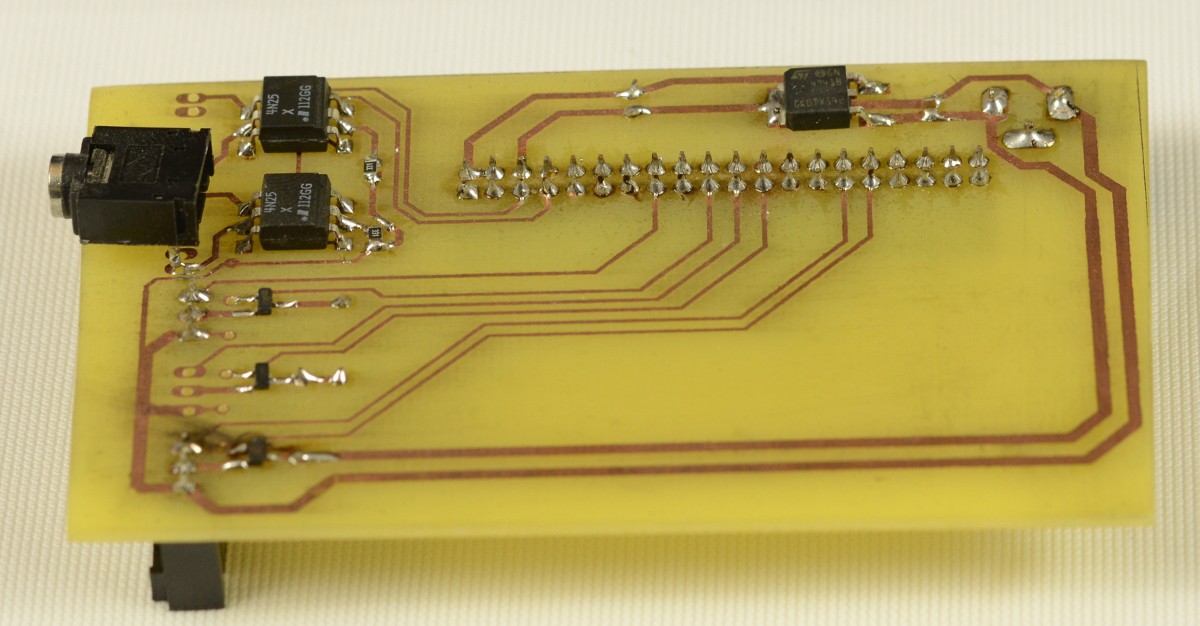
Approach 1: Hard beginnings
![]()
2x20 header was intended for connecting RPi zero ![]()
there's was no way that it will work :p Heheh beginnings was hard, this was not working at all, but at least I learned something with it
first of all... no more etching :p
second even Rpi zero will be too big and complex for such use case I needed to look for something else.
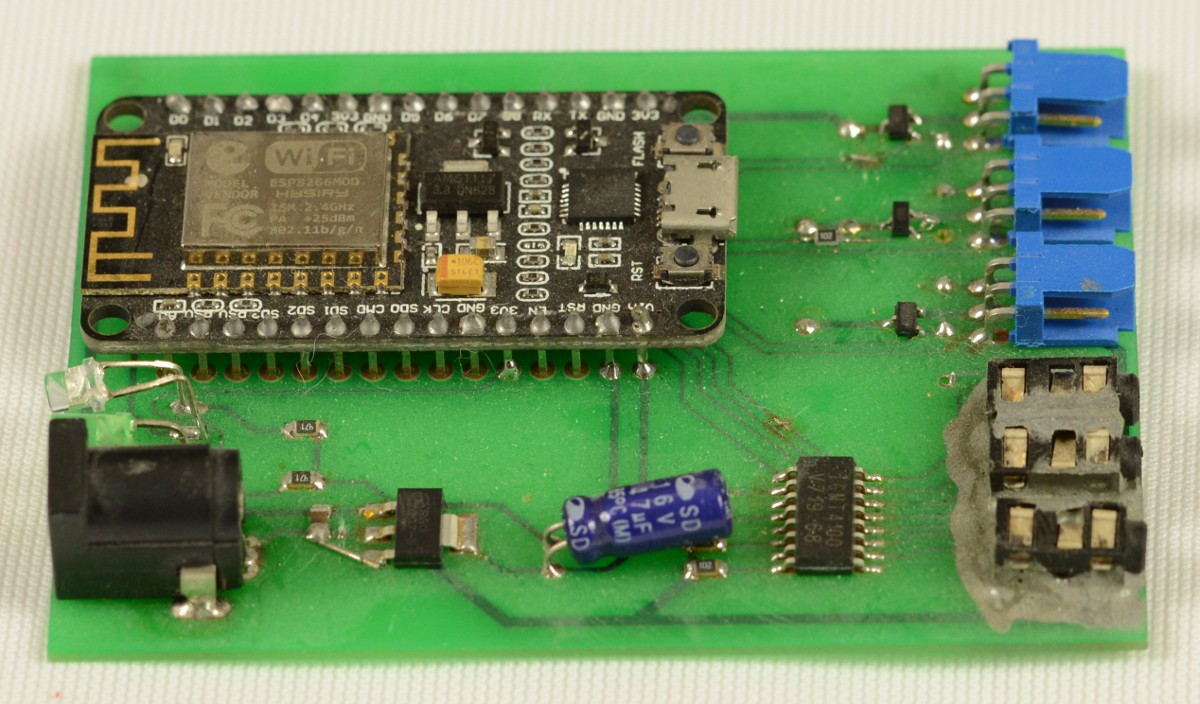
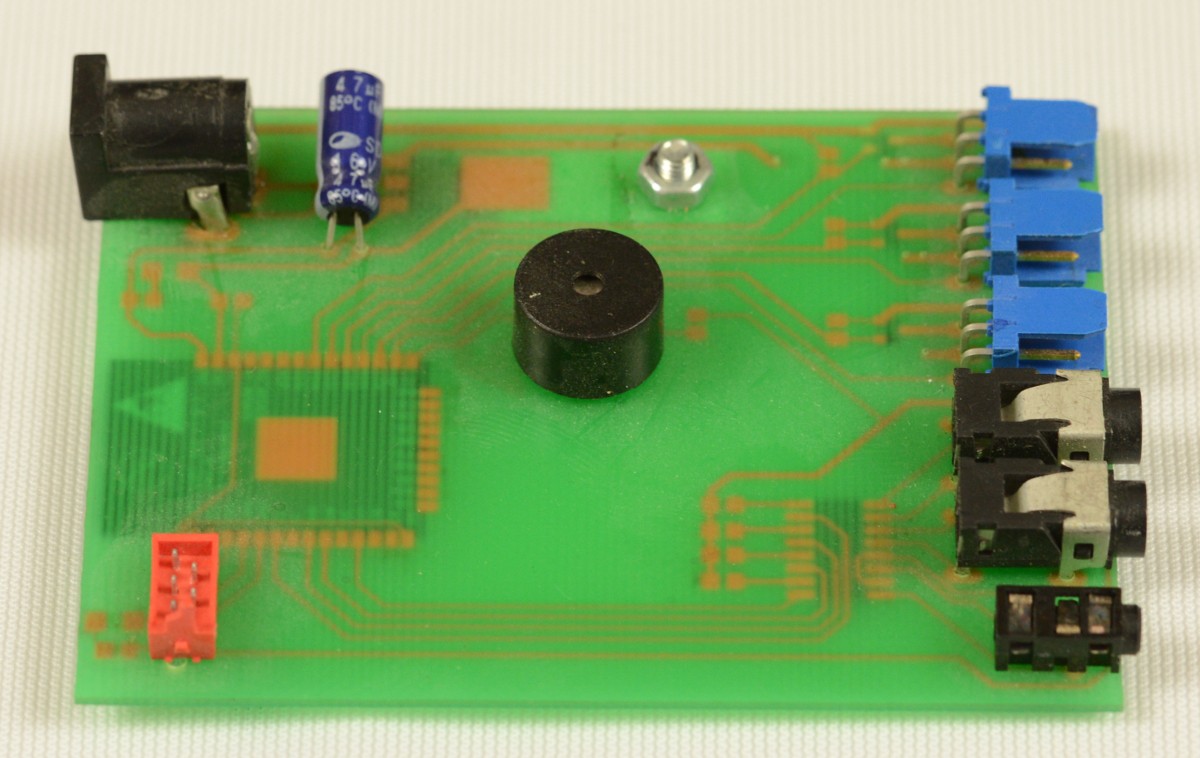
Approach 2: Hmm This isn't how i Imagined it.
![]()
After i came to conclusion that Rpi will be too complex for such task I decided to give a try of esp8266 as it was equipped with WiFi and it's able to run MicroPython, but as you can see, also this approach was... there's was an issues I think biggest of them was that i connected some pin which should be connected, so in effect I was not able to access serial of esp.
Conclusions was following:
- I rather should use "plain" esp board instead of module, as to keep WiFi antenna close to edge of board usb will be directed in direction that is not handy to use.
- If pins which shouldn't be connected cannot be used I will have too less gpio's on esp8266
Approach 3: There's some progress
![]()
Finally... first functional prototype ![]()
a little tweaks was needed This time it was better ...it was even working and was not so bad, for this iteration i abandoned esp8266 and moved to esp32 which have more gpio`s, also instead of module with serial/usb chip I used plain esp32 and just connected external converter for programming purposes.
At this point I started to working on Android application, as well on proper application for Android and after some time I was able to connect them:
![]()
![]()
heheh I had som fun with this, new module kicks in :p ![]()
first visible effects :) Time for conslusions:
There was significant issue with esp32/MicroPython it is single threaded, so for example when i sent script, there was no communication between controller and Android App possible until script was finished, so it introduced a lot of problems, how to stop script or what in situation when user will sent script which will had infinite loop in it.... I realised that i need multitasking, one task/thread for handling communication and controlling execution, second for execution.
Also another reason behind that I abandoned esp32 quite easily as I not liked one more thing about it, programming and debugging of it was not so easy scripts, as on RasPi/Linux.
Approach 4: Big step forward
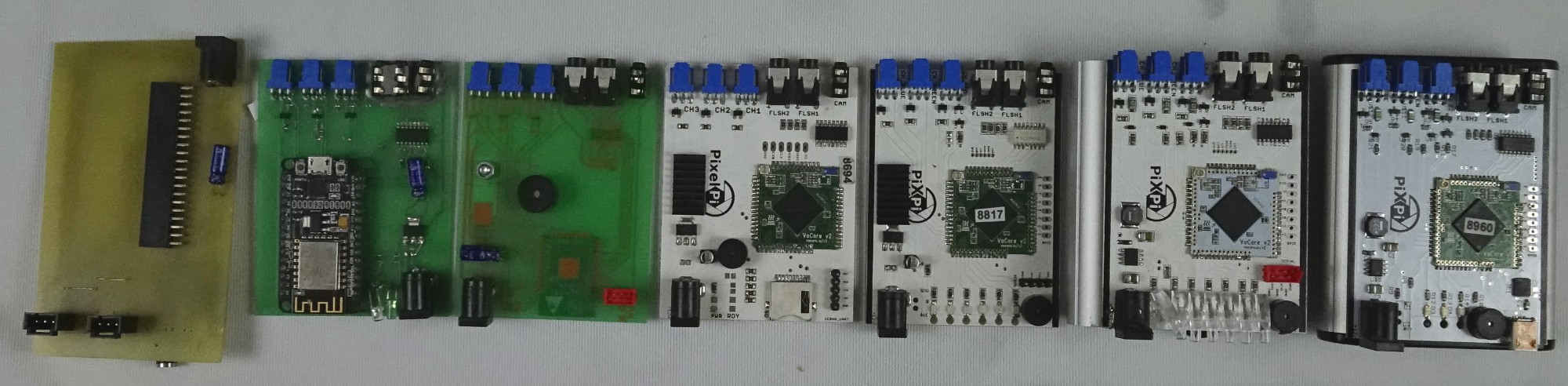
![]()
So finally I found VoCore2, it's a coin sized Linux computer, equipped with WiFi, 580mhz Mediatek SoC, lot of gpio`s, it's available at affordable price level and it's fully open-source as well open-hardware(board design is impressive), so this is why praise it so much ;)
After moving on with VoCore2 I started to writing new control application for a board, which was running multi-threaded server, so it was able to respond on requests even control script was running, also I needed to create library for interfacing with gpio.
Also as you can see at this time i was naming this project "PixelPi".
Conclusions:
- Mistake in design, Ethernet ports cannot be used as gpio's(those which starts with P0..), so I got only one port which was working in it.
- sd card is not really needed for my use-case
- At this moment I also started thinking about adding possibility of control some motorised modules, so I needed a little more sophisticated communication interface for module.
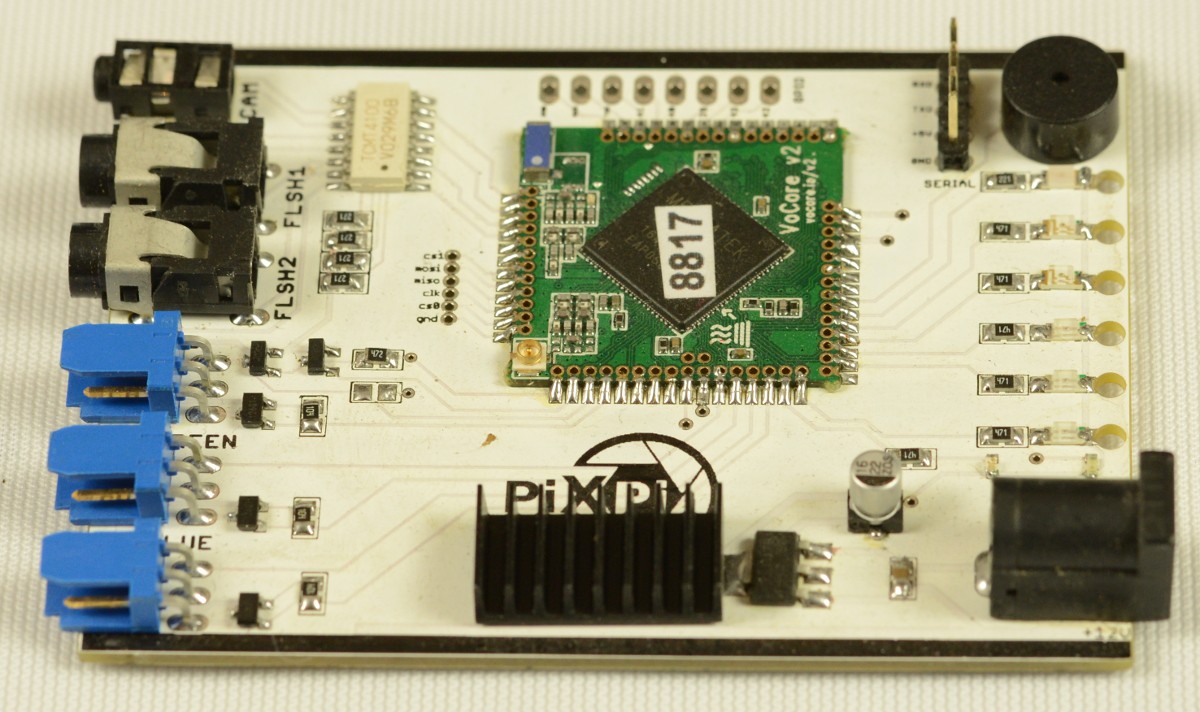
Approach 5: Some tweaks
![]()
So in this approach:
-SD card connector was removed
-led's was added for state signalling
-Added circuit for one-wire/uart conversion on port red, more on this here:
https://www.maximintegrated.com/en/app-notes/index.mvp/id/214
so now port red could be used as input, output and com for one-wire communication.
-Also some gpio connector/pins was added for future uses
Conclusions:
-voltage regulator circuit should be replaced, as there are better ways than heat-sink on voltage regulator.
-ports of VoCore are fragile so should be protected somehow as I killed this board finally with voltage spike from solenoid.
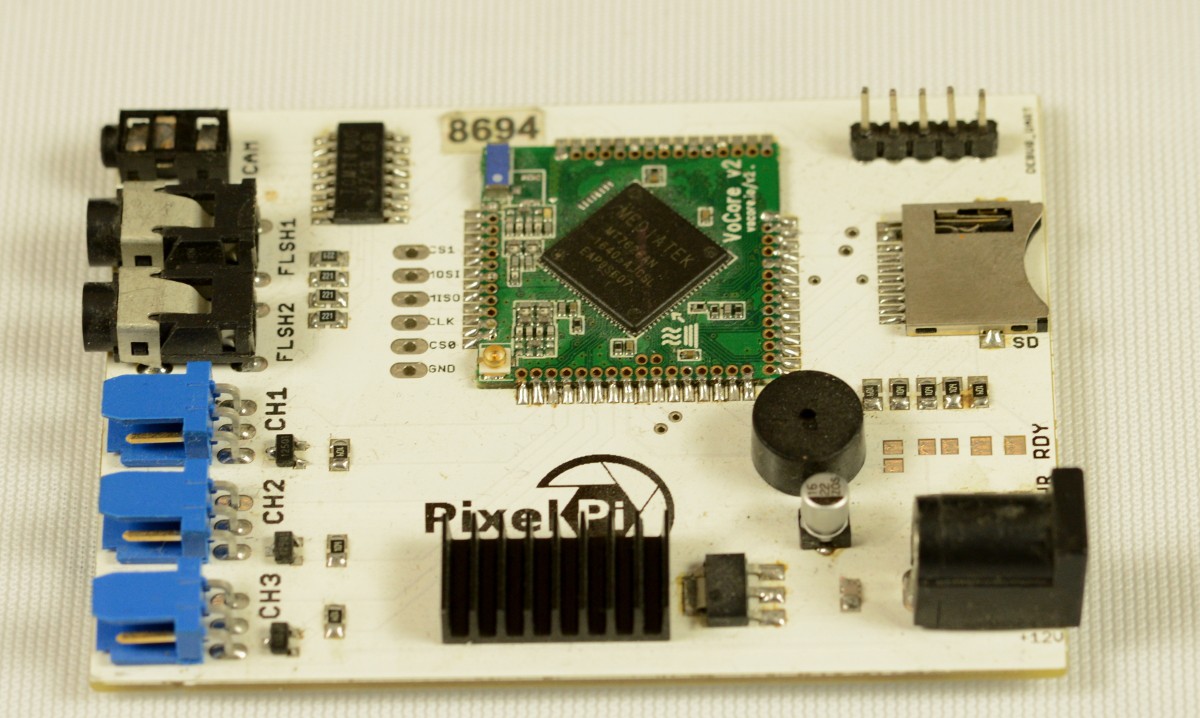
Approach 6: battle-proved
![]()
So on this board switching voltage regulator and some port protections was added and it worked really well, this board is fully functional and it's working until today. Also it was first board which was put in enclosure, with this I made most photos which you will see on website.
Conclusions:
-I don't really need led's for indication of flash and camera trigger state.
-It will be handy to not need for remove board from enclosure to connect to serial console of VoCore.
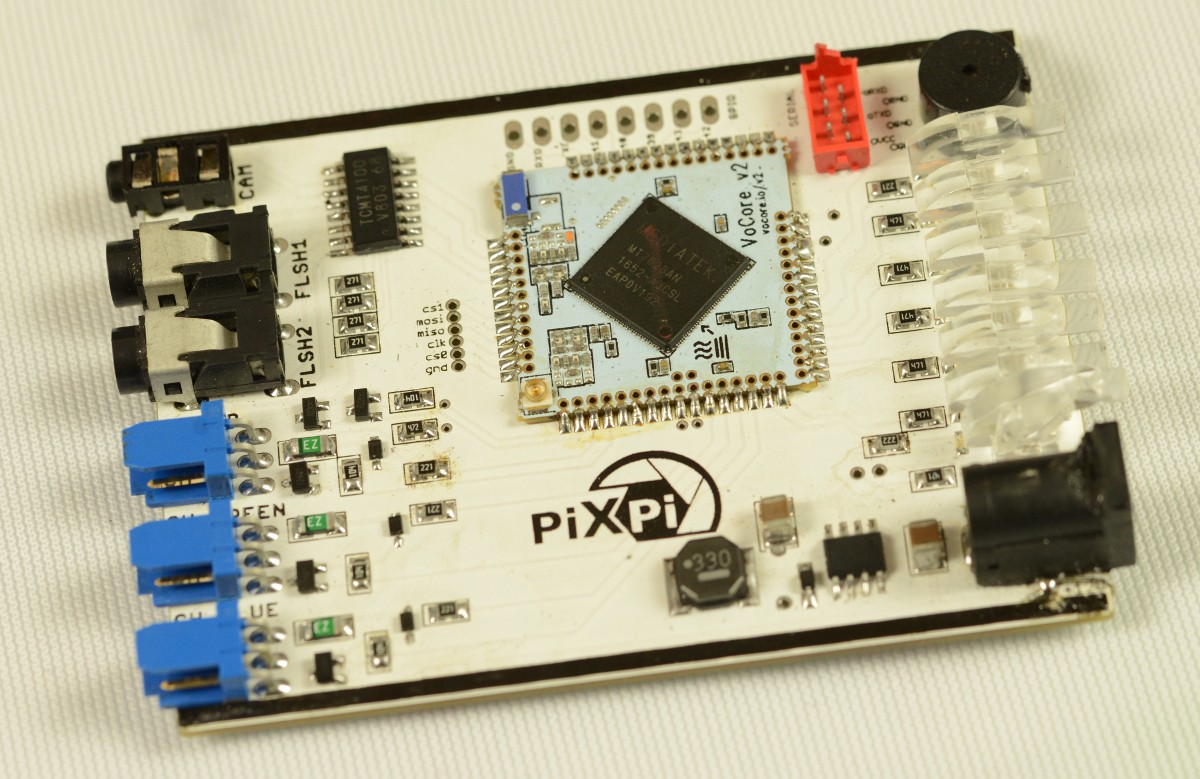
Approach 6: Current version
![]()
Aaand here we are, it's current version, as you can see 3 leds was removed and cp2102 usb/uart converter as well usb port was embedded on a board, so it's easy to access it.
Conclusions:
- Now i have doubts if one-wire is good choice for communication with motorised modules, but I not made a final decision of removing it as maybe it will be good to have it in future, now i'm exploring possibility of using "pulse/pwm"(just like in servos)mode for driving motorised modules.
- It's covering initial goals, so I focusing more on software and modules.
Ideas for future:
It would be very awesome to extend possibility of camera control with PiXpi, currently you can just release shutter, but in future I think it will be possible to control other parameters with ptp interface, through usb/ptp connection.
-
meanwhile... quick test ;)
07/30/2019 at 23:20 • 0 commentsHello i'm just working on little documentation of this project
...but meanwhile, I just got little distracted and just made a quick video on which i tested some standard relay module which you can get from ebay, also example of app usage can be seen there ;)
sorry for not so good focusing I defnitelly need improve on video making skills ;)
above link to such module:
PiXPi dslr camera controller
Modular and programmable DSLR camera trigger




















 Web interface which i used back then, time for quick lesson of polish :D Skrypt=Script, Uruchom=run, also it was lacking any configuration, just run selected script, so in effect I ended up hooking laptop with ethernet cable and direct script editing.
Web interface which i used back then, time for quick lesson of polish :D Skrypt=Script, Uruchom=run, also it was lacking any configuration, just run selected script, so in effect I ended up hooking laptop with ethernet cable and direct script editing.