 Sergei V. Bogdanov
Sergei V. BogdanovStroke is 30+ (not 60+ as earlier!) now. Stroke is leading cause of disability. The spasticity is the most common post stroke consequence.
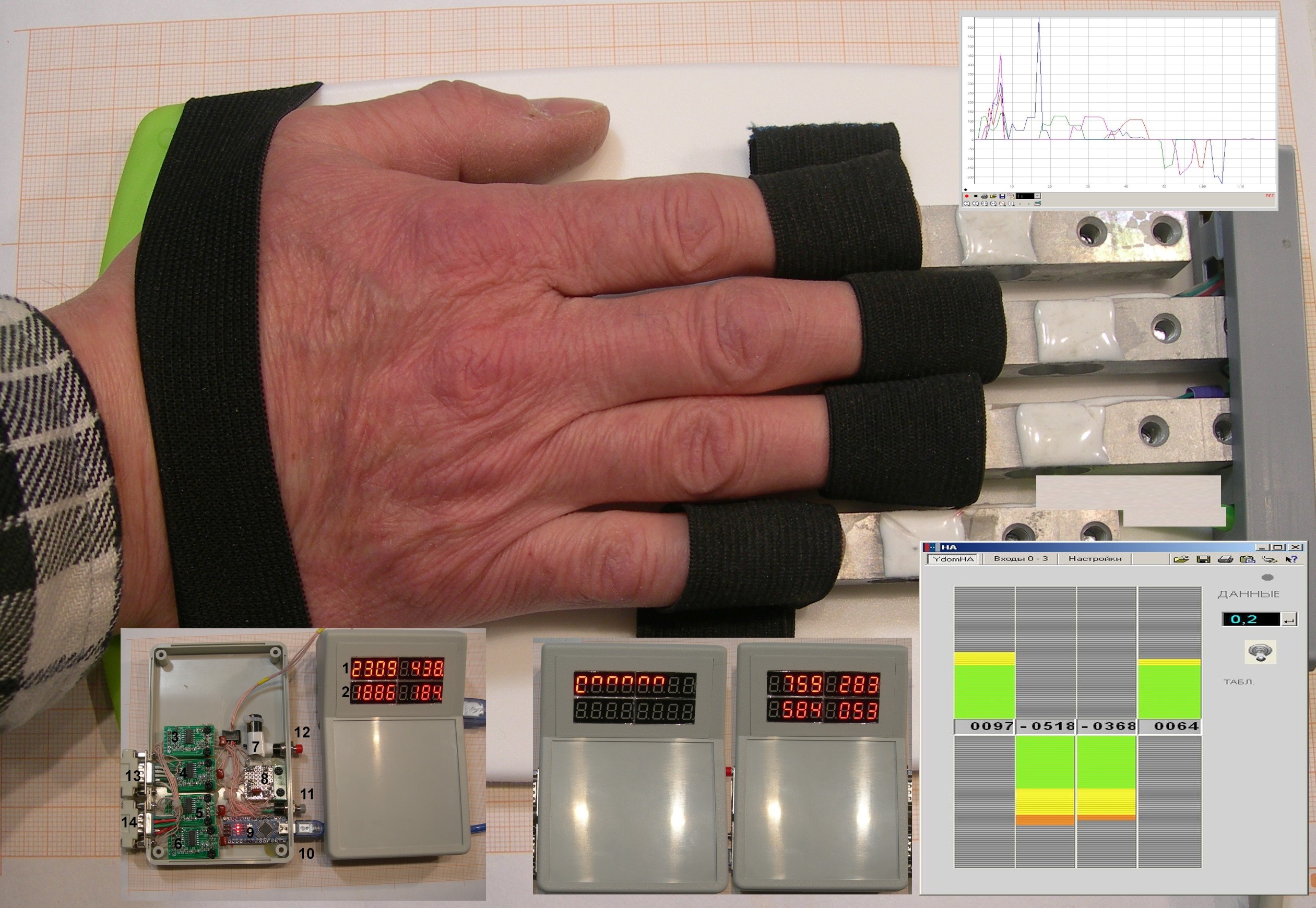
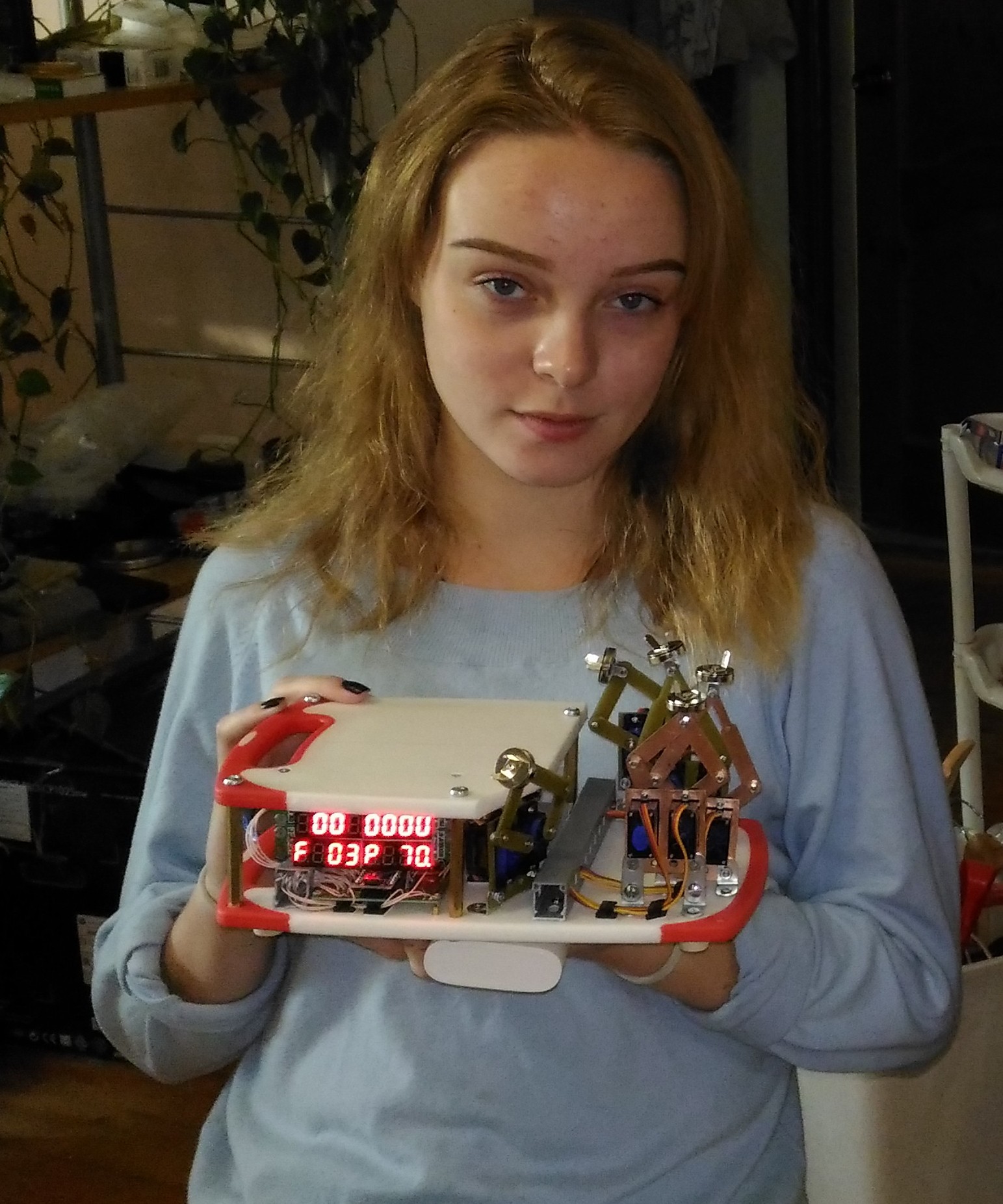
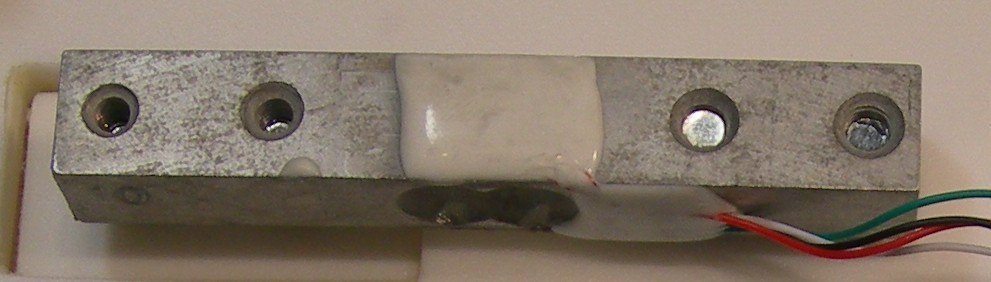
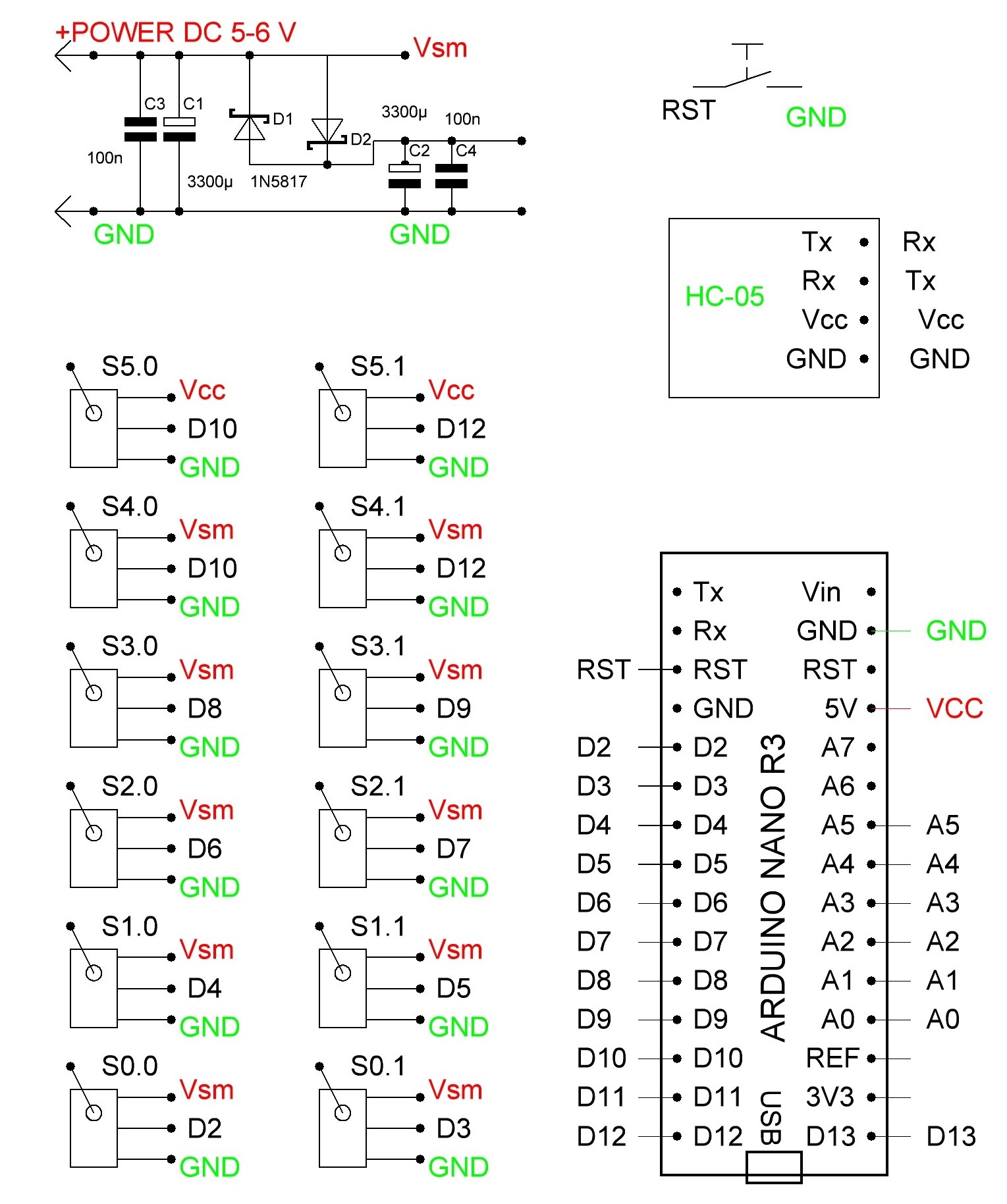
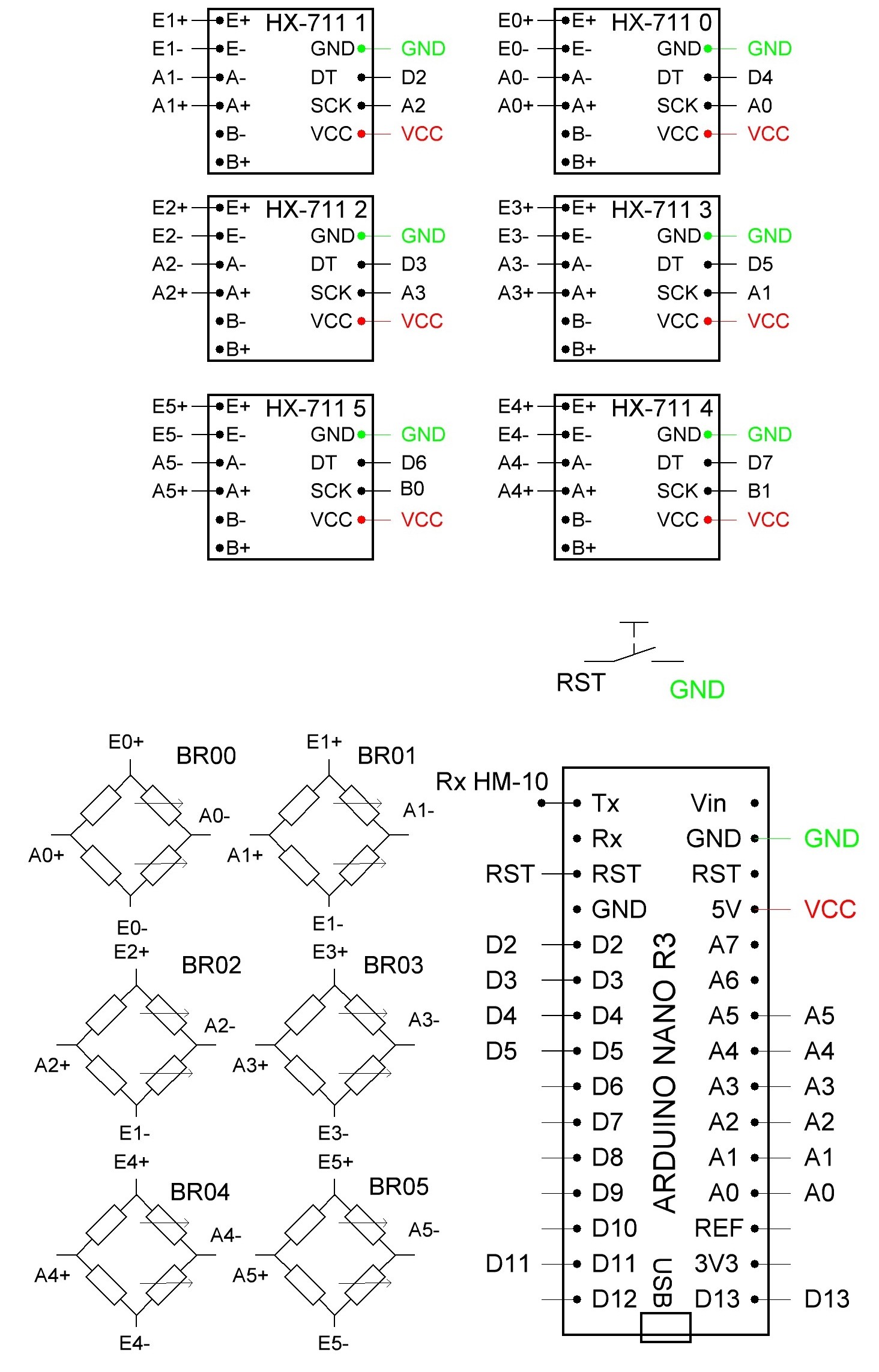
The rehabilitation of lost motor functions must be made as soon as possible. The assisted rehabilitation is maximally effective in the first 1- 2 months. We construct simple and chip rehabilitation robotics device - Post Stroke Spasticity Rehab Helper. The base of the Rehab Helper is Arduino Nano and 12 micro servos SG90. You can assemble the Rehab Helper with 2, 4, 6, 8 or 12 servos, for 1-2-3-4-5 +1 (for left / right hands) fingers. The force of movements are measured by tenzo Bridges. You can see the force plot and values on PC or Smartphone screen.
Every mechanism is 5-bar linkage that convert rotational motions of servos to 2-dimensional motion. The top of linkage is equipped by swivel, for the finger holder is attached to the swivel. The fingers are fixed with sticking plaster.
User can control the amplitude of massage and movement mode (16 preprogrammed).
The servos are controlled by Arduino Nano board. Every finger holder movement is 64 point interpolation of curve. Program code is free (GPLv2). All schematics, fugures, photo are open for private use. It can be controlled via PC or autonomously.







Thanks! I will check them ASAP