0%
0%
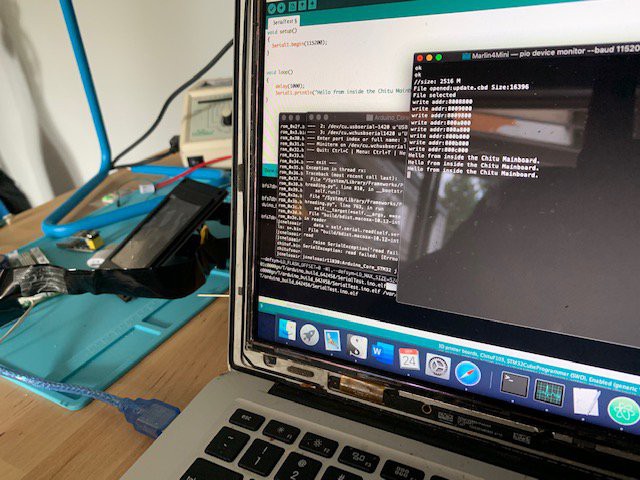
Chitu 3D Printer Mainboard Hacking
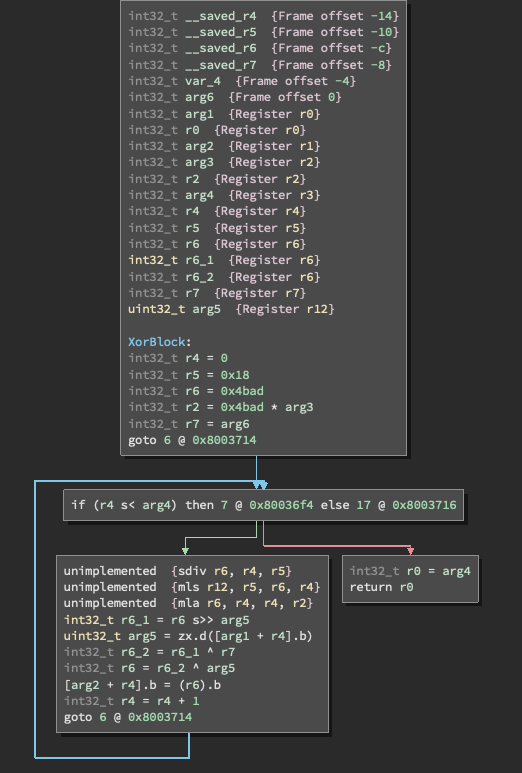
Studying the encryption on Chitu's 3D Print controllers
 J.C. Nelson
J.C. NelsonBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 ziggurat29
ziggurat29

 foamyguy
foamyguy
Following this— I tried the github links but they’re all dead. Is there and update to the repository location?
I have a Chitu board on a QidiTech X-one and I’m kinda fed up with dealing with the proprietary Sailfish firmware and it’s lack of support for calibrating e-steps or PID adjustment. If I can find a way to get Marlin on it, I’d be thrilled! Any assistance would be appreciated— I really want to find this info on github but the links are dead. Any ideas?