 Paul Gould
Paul GouldStart of the simplified 3D Printed Quadruped using 12x triple (single stage) cycloidal gearboxes with brushless motor and a custom controller.
YouTube videos and logs for updates.
Triple Cycloidal Brushless Actuator
25:1 Ratio
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
Start of the simplified 3D Printed Quadruped using 12x triple (single stage) cycloidal gearboxes with brushless motor and a custom controller.
YouTube videos and logs for updates.
I printed one at 95% infill and it is holding up ok so far. But before I print another four legs I wanted to make sure I made the first leg as strong as possible (with my cheap 3D printer).
3D printed plastic is better under compression than tension.
As the gearbox outer housing will be under tension, I wanted to preload the housing.
Things I looked at
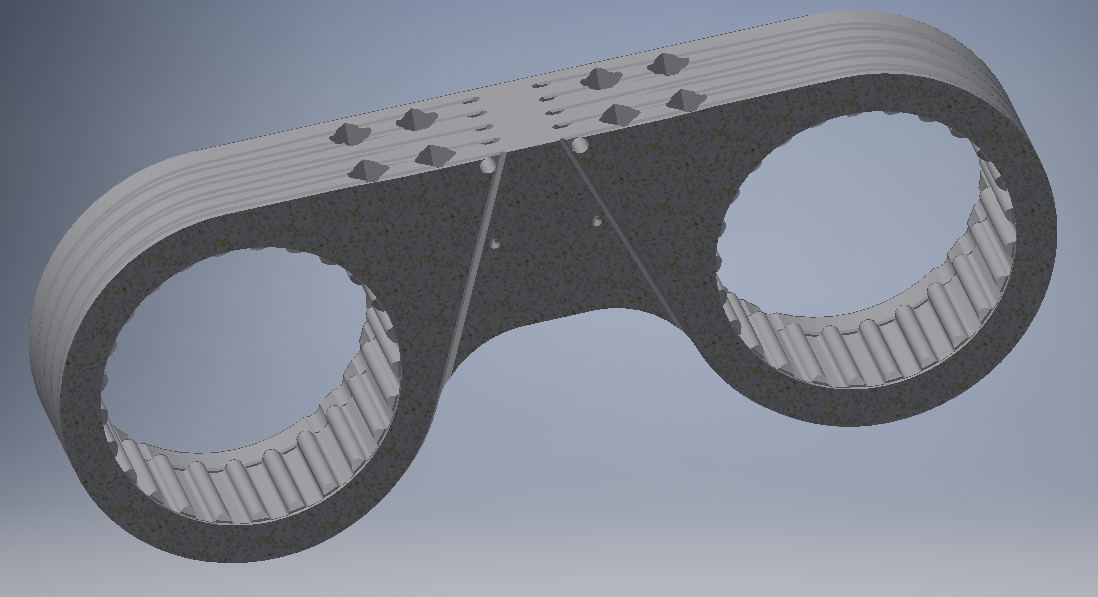
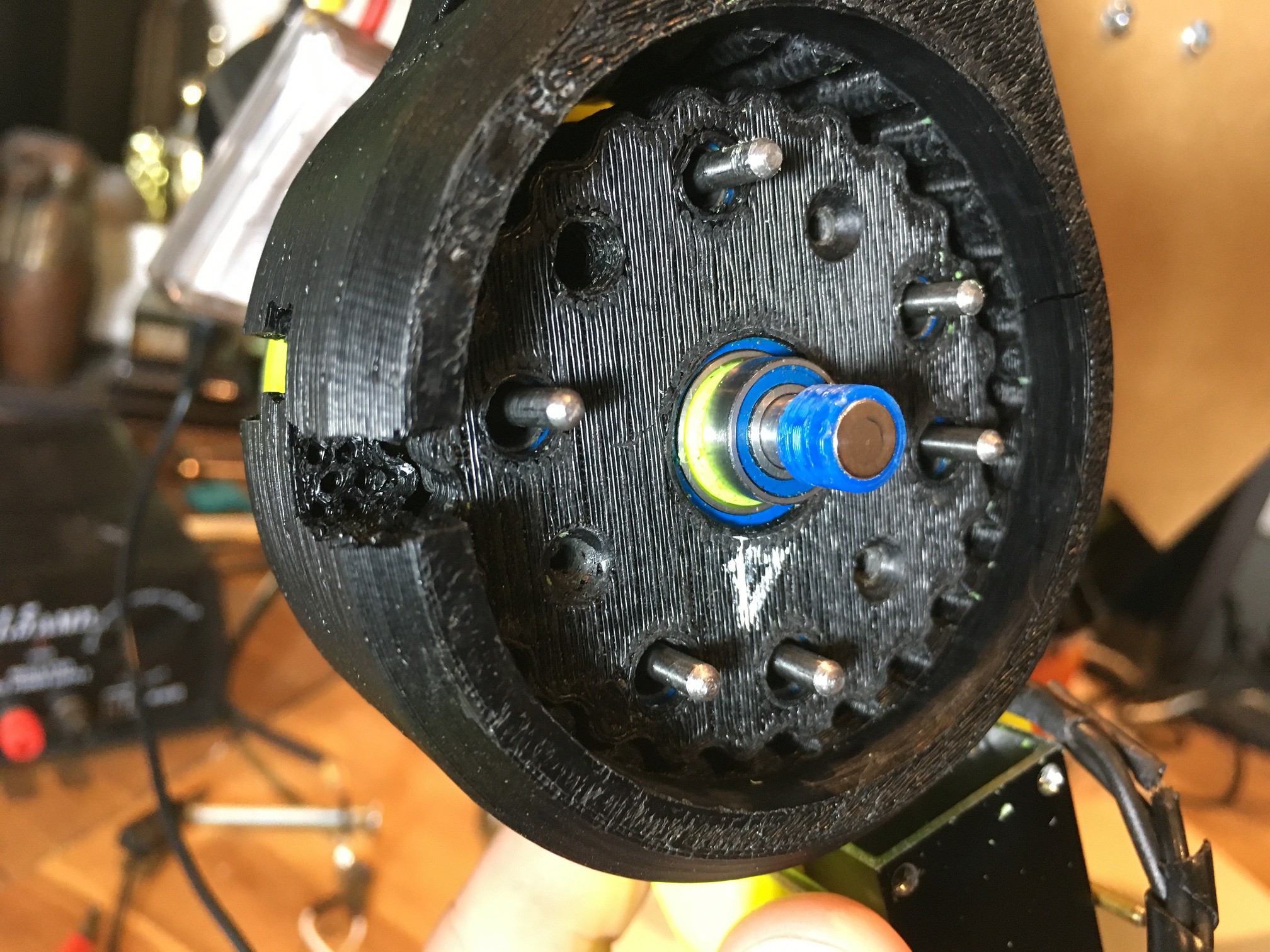
I decided on making grooves on the outside and putting yellow braided zero-stretch fishing line.
As I didn't want the line to split though the 3D printed layers, I coiled the groves on a ~5deg coil angle.
The line is tighten by twisting the line. May try two lines per groove.
I will also try multi-strand nylon stainless lure line.
End View
Bottom
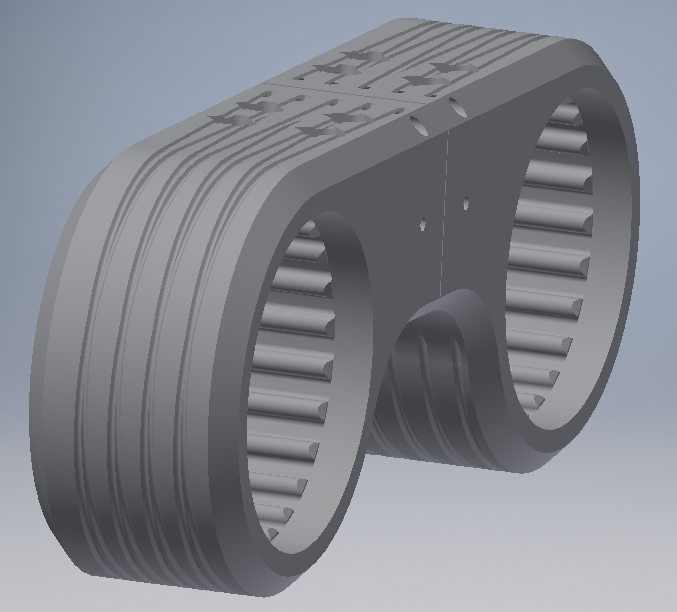
CAD
CAD end
I forgot to "zero" the knee before starting the inverse kinematic testing. It was the first day on the leg test jig.
Gears have 85% ABS infill, housing has 50% ABS infill. I will have to add the joint absolute encoder back into the system.


May I ask what software did you use for test and programming your bot?

I sense a robotic dog in the works. Looking forward to more details.

Yes it will be some sort of Quadruped. I'll update more shortly.






 Aidan Leitch
Aidan Leitch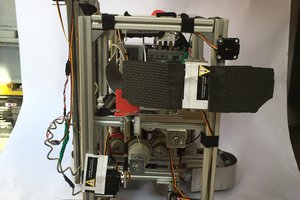

 Les Hall
Les Hall
 Katie G
Katie G
very good