 NEBRA Labs
NEBRA LabsI vividly remember those silent screams of mine under the blanket at 3:00 AM in the morning of 17th Feb, 2017. My parents were sleeping and I was not allowed to be awake at that hour. But that day, I was ready to break all rules. I had the laptop and I was watching Space X launching its Falcon Heavy for the first time. I was in shock how could one launch rivet a child far out in another country. I recall my self crying after all this. I hold this launch close to my heart, because I know that great things start small, where risks, challenges ,and setbacks are all part of the journey.
Project Mooba was born out of need to design something that people would look, stare at and say, "How?" For us hobbyists and engineering enthusiasts, this might be something easy to design and build but for people in my community, it is something out of the box and new. Over time I have felt that it is something that inspires them.
Since revelation of this idea, I have been on a hunt to know the why. Firstly, it's something rare in a world full of political buzz and daily problems of poor community. Secondly, inventions give rare hope to people that tomorrow would be better. After reading tons of books and investigating how great nations were built, I questioned, "Was it the politicians who transformed nations?" The answer was no. I say, it were those scientists, engineers, businessmen who fueled the trans-formative engine of the industrial revolution. They showcased engineering like no one ever did; they inspired a new generation of thinkers and inventors; they showed the world that impossible was possible. It was this fuel that allowed United States of America to progress in 300 years that the world could not in 5000 years; it was this fuel that built Korea, Japan, and Germany out of toils, tears,and dust. So the questions is what is it in our people that resists progress.
Upon deep analysis of my society and its dynamics, I have come to know why nations as a whole stay poor and what can be done to fix it. We have this rooted belief that if it comes to building engines, cars, smartphones, airplanes, it can only be done by Chinese and Americans. They say, "We are not capable, we do not have the right technology ,or money. " I question them, "You wanted to build an atom bomb, you did it despite all resistance in the world," "You wanted to build the best military in the world, you did it." When things become a matter of survival, anything can be achieved. All of these achievements were inside military division for the protection of this country. In months, technologies developed would become obsolete, thereby, I question my them yet again, "What are you doing to inspire people to learn?" You can't impose learning ,but at least show them what can be achieved if they do. They don't know what are these missiles, aircraft and bombs. Commercialize and show them the process. It is the responsibility of our elders to inspire the young generation but sadly it is not there.
This is where I want to build a platform to connect young scientists together and use social media as a tool to slowly alter my society's mindset where they start admire engineers and artists instead of celebrities. Let the news be made, let the people know how science can be used to engineer the future. Project Mooba is the first chapter in that regard.





 Radu Motisan
Radu Motisan
 Kartik Tiwari
Kartik Tiwari

 Limenitis Reducta
Limenitis Reducta
Great project!
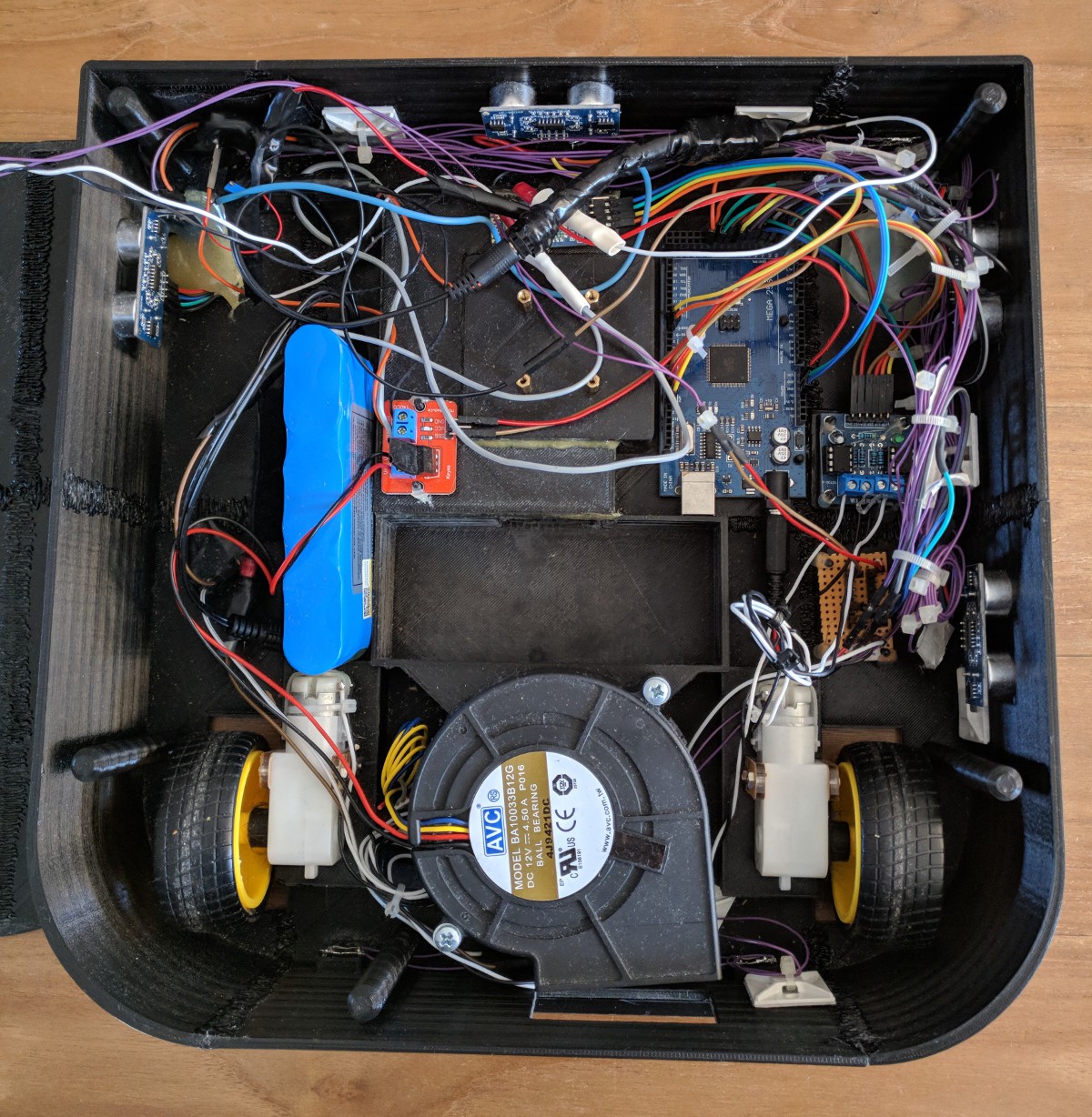
I always wanted to build a vacuum robot myself. Which rechargeable battery pack and charge controller to you use?