 Emmanuel
Emmanuel-
Face Recognition & ArUco markers
10/28/2020 at 13:23 • 0 commentsBeen a while this the last log, I let aside the development of the Kinematic to work a bit on the RaspberryPi side. So far I could install everything I needed and tested one of the main feature of the robot: Face recognition and tracking.
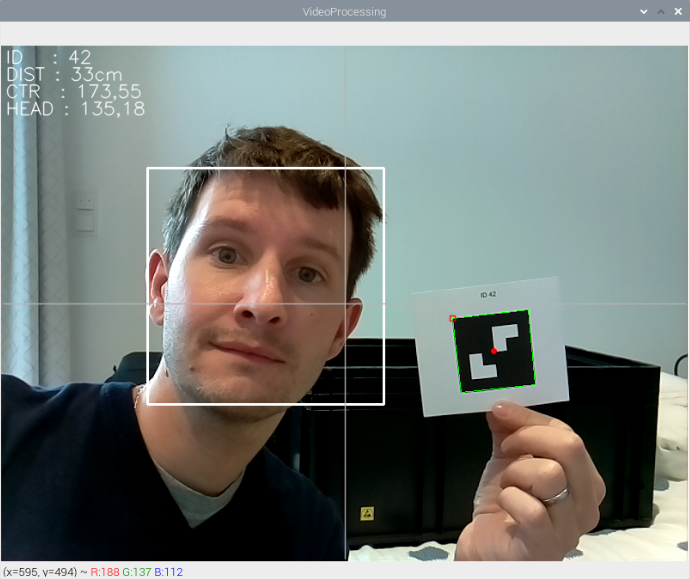
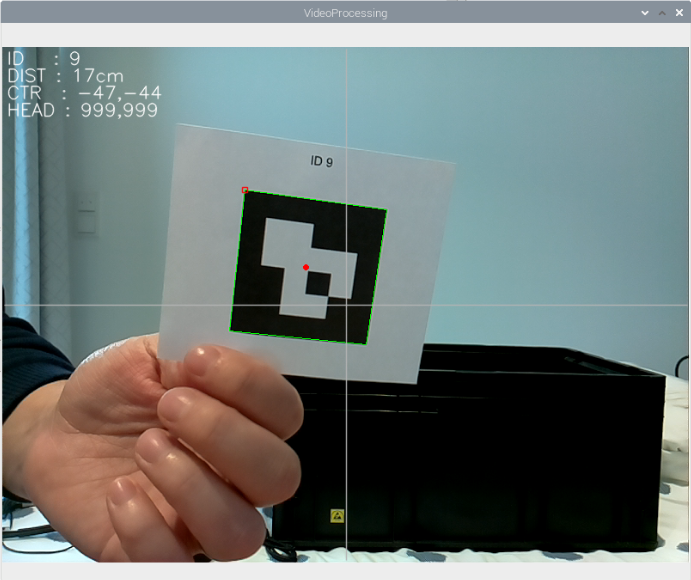
I used the standard OpenCV library for face tracking and recognition (haar cascade). This work very well, I'm able to recognize different faces and track the x,y position regarding the center of the camera's image. I also discovered the ArUco markers for augmented reality, I'm planning to use them for the docking station and some other features like cube toy for Animabot.
The framerate is not as high as expected but this will do for the moment. The next step is to transmit all this to the motherboard, let's see how it goes :D
![]()
![]()
-
Let's go for some Kinematics !
05/11/2020 at 08:49 • 0 comments![]()
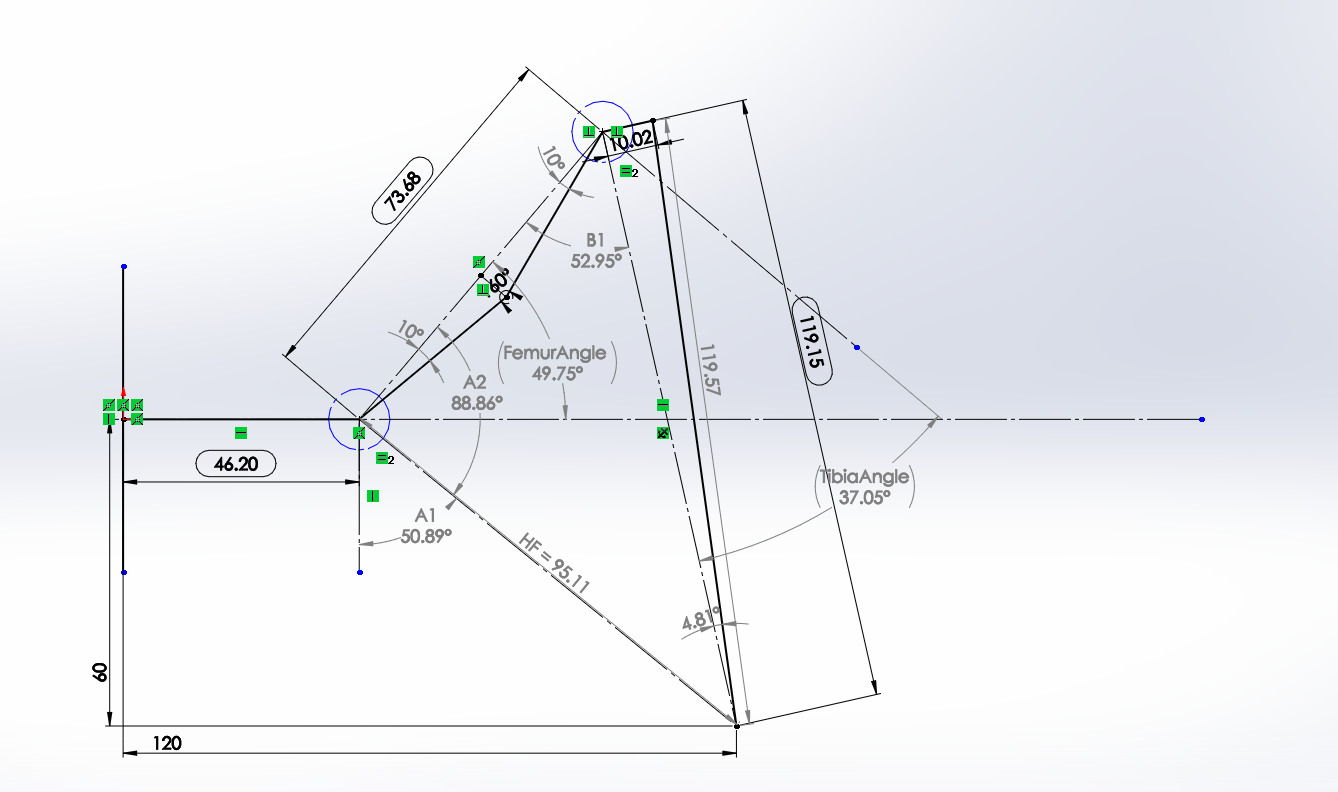
Instead of making and Excel sheet to check the value of the Servos angles, let's use Animabot's simplified leg to debug the IK equations ;)
-
First expressions !
04/12/2020 at 09:24 • 0 commentsThe development of features and functionalities is going pretty well. I’m now working on the mood and expression of the little guy. Now that the drivers are mainly done, this makes thing much easier :)
-
OLED and Battery Charger
03/24/2020 at 13:27 • 0 commentsUpdate concerning the Animabot's project. The Flex OLED driver has been updated as well as the battery charger and the IMU. Now, I can properly display sensors information on the back of the robot. This is a nice little feature which is pretty handy for debugging but its main job will be to display useful data concerning the robot's mode, power and battery info.

")
Animabot - Advanced Hexapod Robot
Animabot is a 3D printed hexapod robot created to be a daily life companion to interact with people and its environment.

")